






一.Linux虚拟机搭建
我们首先利用VirtualBox,在我们的电脑中搭建起linux的虚拟机环境
1.virtual box 【下载地址】https://www.virtualbox.org/wiki/Downloads
2.ubuntu20.04.6 镜像【下载地址】Index of /ubuntu-releases/ (bupt.edu.cn)
(选择20.04.6的桌面端iso文件即可)
注意!在整个安装过程中,为了尽可能减少vb的兼容性报错,所以安装的根目录必须为英文!
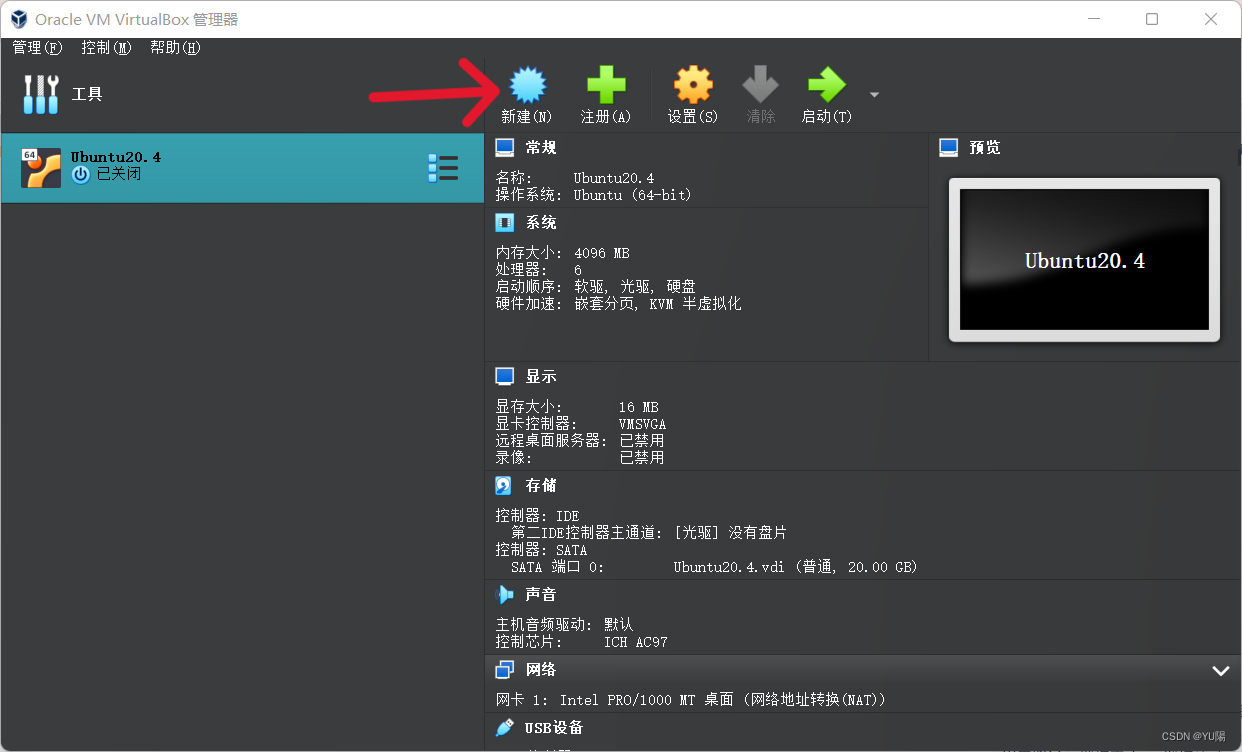 安装好VirtualBox之后,如图点击新建
安装好VirtualBox之后,如图点击新建
虚拟光盘一栏选择你下载好的ubuntu20.06.4的iso文件
之后酌情选择虚拟机内存配置与虚拟空间即可
3.部分报错解决方案
在ubuntu的镜像安装过程中,经常有各式各样的报错,本人在这里列举几个常见的错误代码和可能的解决方案
1. Error in supR3HardenedWinReSpawn报错
这类报错通常是因为vb的核心驱动没有正确运行导致的
①重装vbossup
进入virtualbox的安装根目录 依次打开drivers > vboxsup,右键VBoxSup.inf点击安装后重启电脑即可
②修改注册表数值
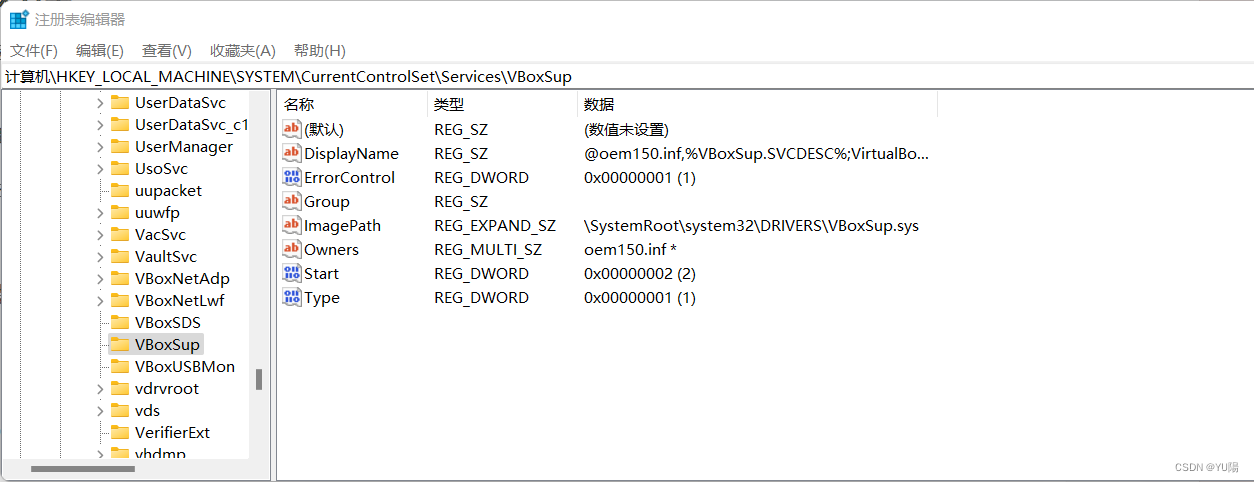 打开路径HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Services\VBoxSup,双击将start的数值改为2,重启电脑即可
打开路径HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Services\VBoxSup,双击将start的数值改为2,重启电脑即可
2. 0x80004005报错
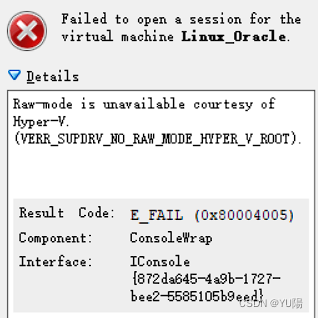
如图,这类报错是由于没有关闭windows自带的虚拟化Hyper-V导致的
以管理员身份运行cmd,输入命令:bcdedit / set hypervisorlaunchtype off,重启计算机即可,当然,也有可能部分电脑存在系统禁用虚拟化的问题,这需要自行进入Bios里,将SVM Mode的Disabled改为Enabled即可
其余的报错可能是由于系统的兼容性或用户权限问题导致,由于报错的情况多种多样,我在此不过多赘述
二. ubuntu20.04.6配置
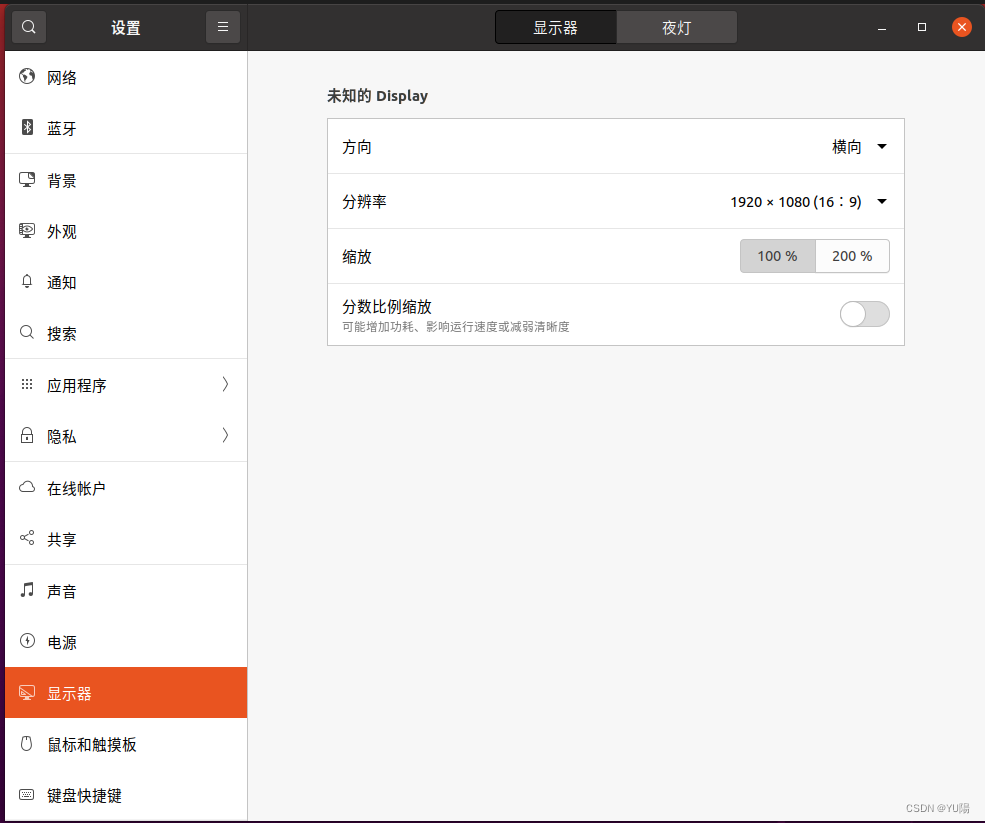
首先可在设置中调整分辨率大小,避免操作过程中显示不完全问题
设置>显示器>分辨率
 接下来配置软件源,因为软件源默认为国外,速度比较慢,所以我们打开软件与更新,将下载自一栏改为阿里云的镜像网站
接下来配置软件源,因为软件源默认为国外,速度比较慢,所以我们打开软件与更新,将下载自一栏改为阿里云的镜像网站
 接下来更新我们的数据库,ctrl+alt+t,依次输入并运行下面三个命令
接下来更新我们的数据库,ctrl+alt+t,依次输入并运行下面三个命令
# 更新本地包数据库
sudo apt update
# 更新所有已安装的包
sudo apt upgrade
# 自动移除不需要的包
sudo apt autoremove
剩余的个性化设置大家可以自己搜索进行选择
三、ROS安装
ros的安装我们选择鱼香ros一键安装,也是最简单的安装方法,输入命令
wget http://fishros.com/install -O fishros && . fishros 依次运行5(更换系统源并删除第三方源),1(安装ROS2选择Foxy,ROS1选择noetic1),3,4
依次运行5(更换系统源并删除第三方源),1(安装ROS2选择Foxy,ROS1选择noetic1),3,4
四、小海龟测试(ROS1)
第一个终端运行roscore
第二个终端运行rosrun turtlesim turtlesim_node
第三个终端运行rosrun turtlesim turtle_teleop_key
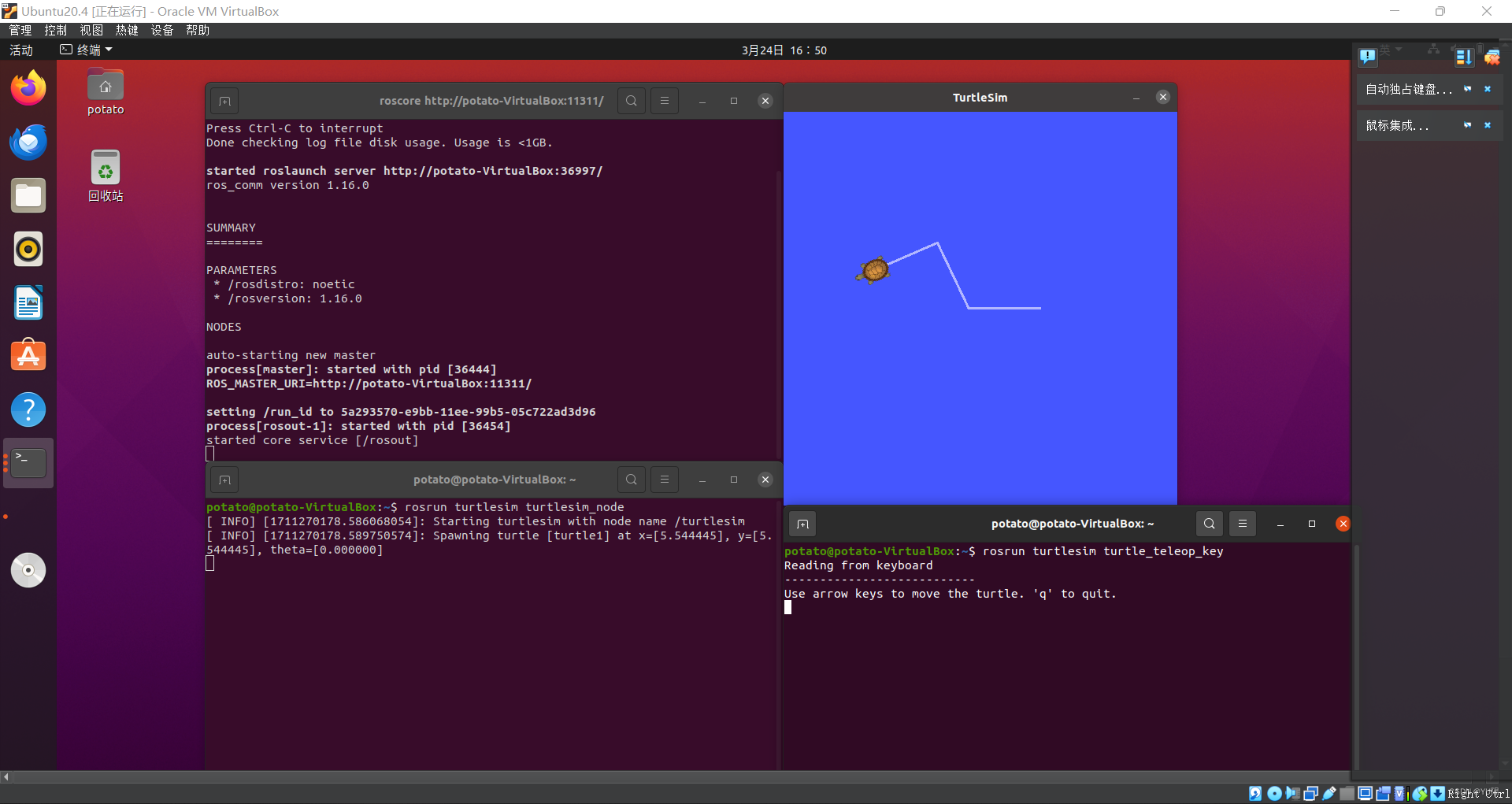
用方向键就可以控制小海龟移动了,自此,ros1安装完成
五、ROS2安装测试
ros2安装完成之后,我们使用talker和listener对ROS2的通信进行测试
一个终端启用talker,另一个启用listener
ros2 run demo_nodes_cpp talkerros2 run demo_nodes_py listener
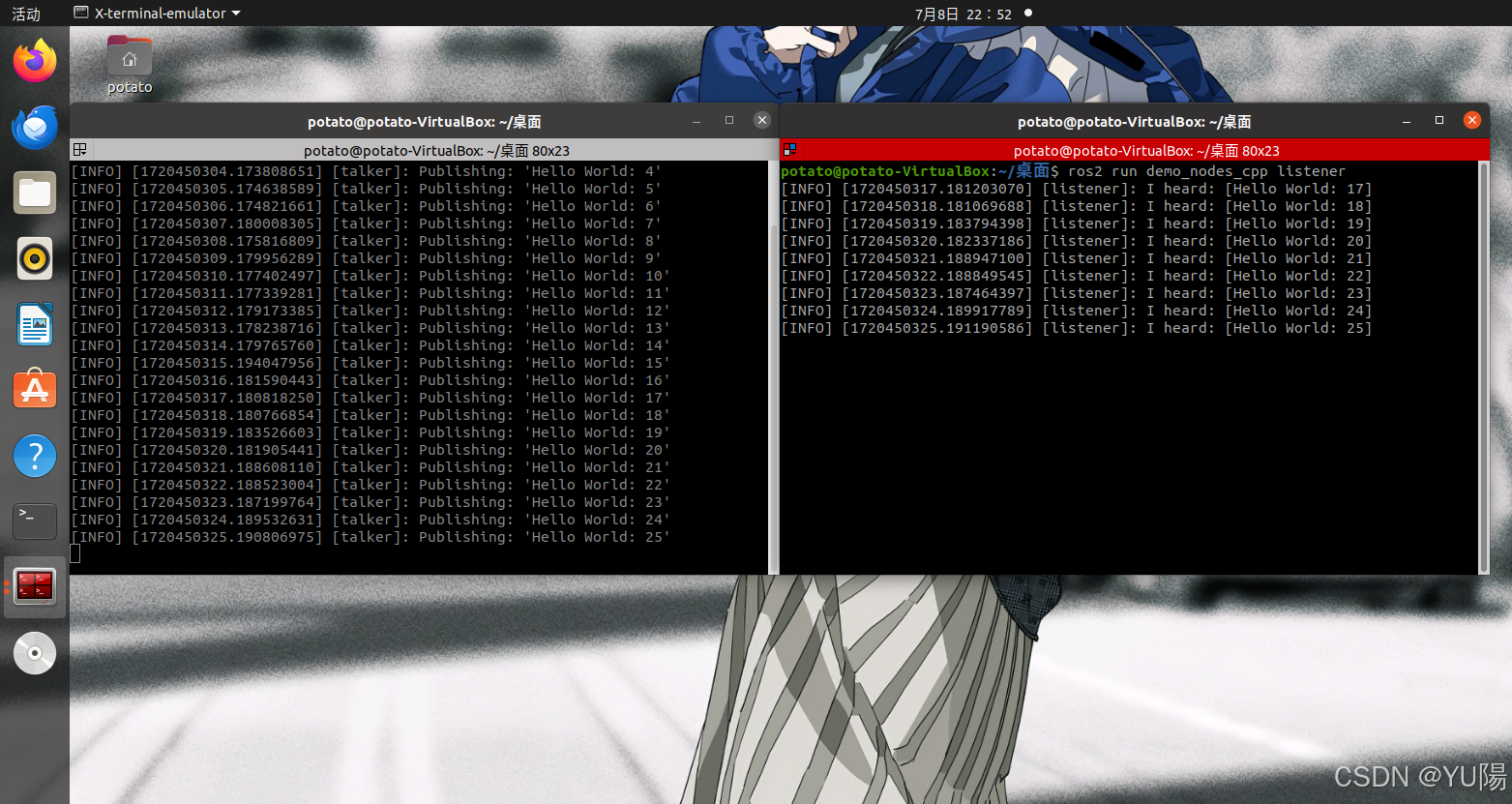 如果二者之间通信正常,说明ros2安装完成
如果二者之间通信正常,说明ros2安装完成

















 339
339

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









