





link
-
origin 设置偏移量与倾斜弧度
-
属性1: xyz=x偏移 y偏移 z偏移
-
属性2: rpy=x翻滚 y俯仰 z偏航 (单位是弧度)
-
-
joint
-
origin
- 属性: xyz=各轴线上的偏移量 rpy=各轴线上的偏移弧度。
两者性质完全不同;
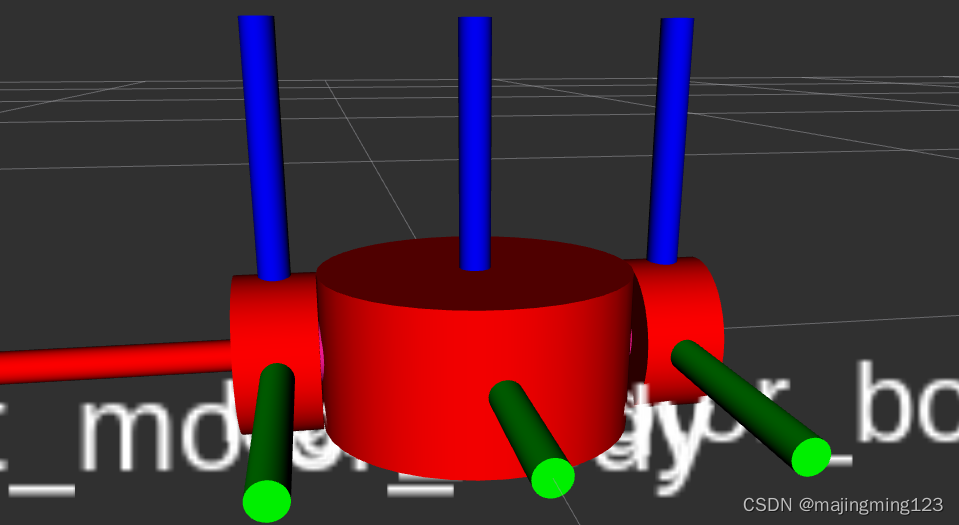
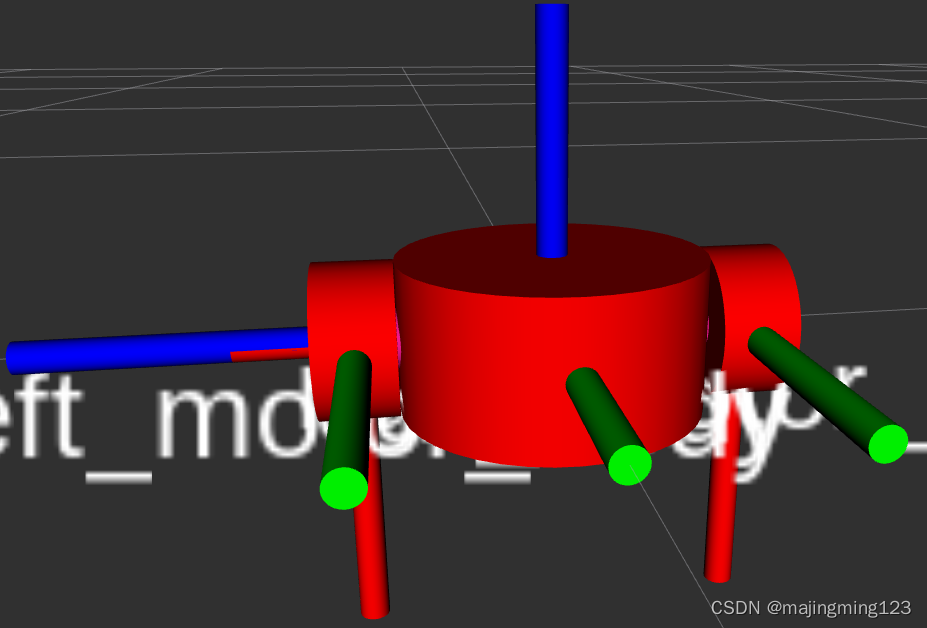
link的origin只是将初始位置进行变化,坐标系指向未进行更改;
joint的origin将link整个坐标系进行的偏移以及翻转;

origin 设置偏移量与倾斜弧度
属性1: xyz=x偏移 y偏移 z偏移
属性2: rpy=x翻滚 y俯仰 z偏航 (单位是弧度)
origin
两者性质完全不同;
link的origin只是将初始位置进行变化,坐标系指向未进行更改;
joint的origin将link整个坐标系进行的偏移以及翻转;
 2771
471
5787
1148
2771
471
5787
1148











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























