







在gazebo中建立环境和车辆模型(二)
1.引言
在gazebo仿真工具中对机器人的物理性质(如:重力、阻力等)进行仿真。接上一节环境模型,这一节从机器人模型搭建、传感器插件添加。
本节参照下方教程。
https://blog.csdn.net/Hu_weichen/article/details/86682796
2.solidworks 建模
(1)注意事项:为所有装配的连接配置坐标系和基准轴;坐标系的X Y Z轴方向要一致(x轴为车辆前进方向,z轴垂直向上; y轴向左;即复合右手法则);工具–file–Export as URDF时选择(命名原则:小写字母+数字)保存;
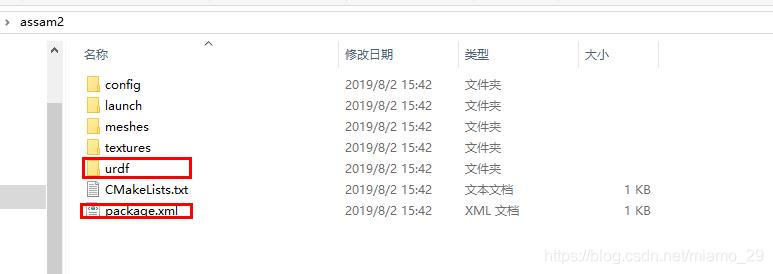
(2)修改文件
修改package.xml文件和urdf文件
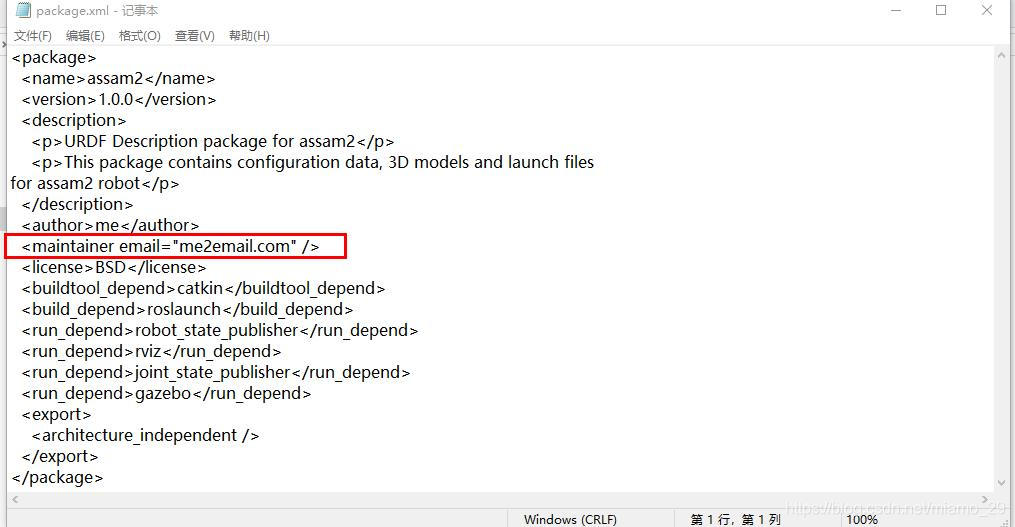
2email.com 改为@email.com
urdf改为robots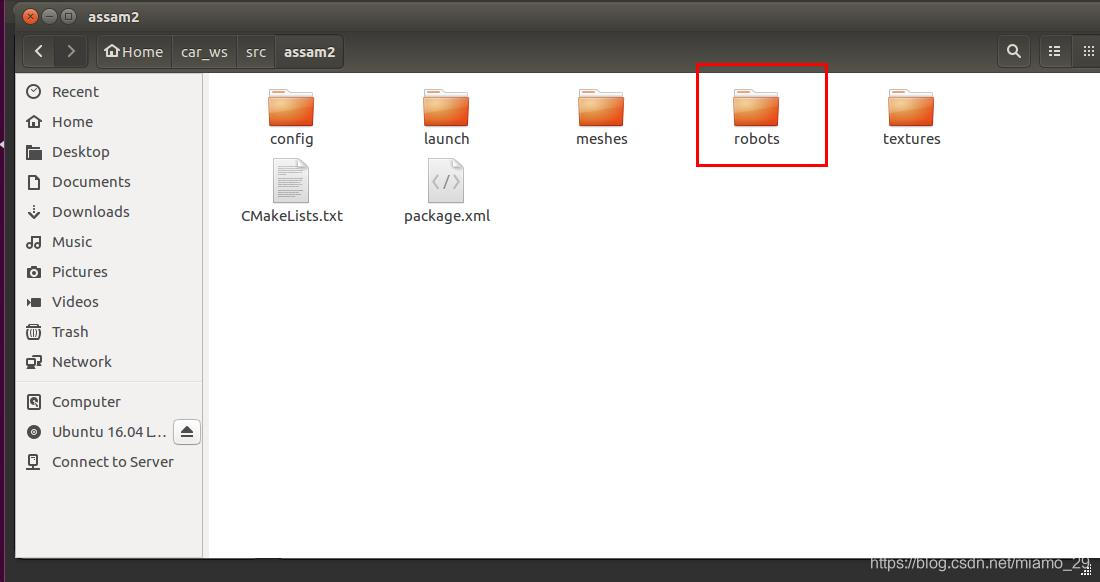
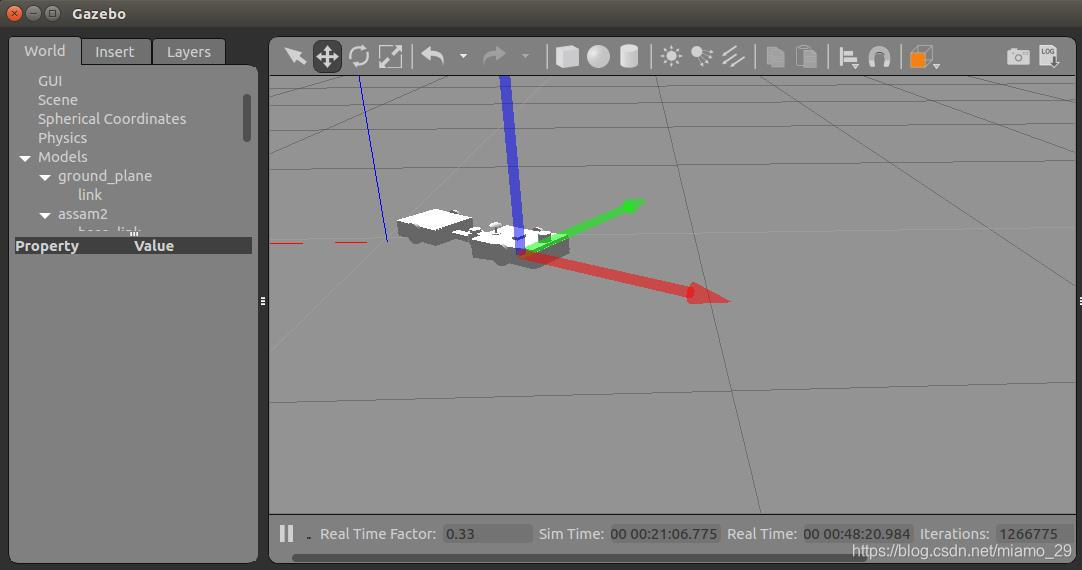
3.在gazebo中打开这个模型
cd ~/car_ws
catkin_make
source ~/car_ws/devel/setup.bash
roslaunch assam2 gazebo.launch
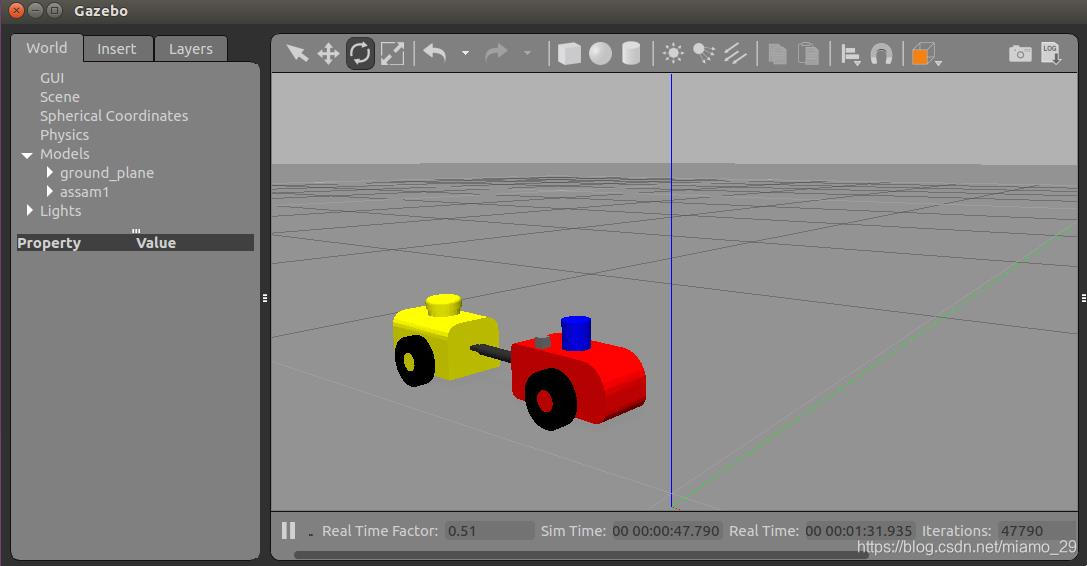
在urdf文件夹的smartcar.urdf中添加代码,赋予模型Gazebo中的显示颜色。
在robots中的.urdf 文件的首行添加
在文件最后添加下方代码,关于颜色的不同可以参考ros wiki 的网址
<gazebo reference="base_link">
<material>Gazebo/Red </material>
</gazebo>
<gazebo reference="r_link">
<material>Gazebo/Yellow </material>
</gazebo>
<gazebo reference="wheel_link1">
<material>Gazebo/Black </material>
</gazebo>
<gazebo reference="wheel_link2">
<material>Gazebo/Black </material>
</gazebo>
<gazebo reference="sensor_link1">
<material>Gazebo/DarkYellow </material>
</gazebo>
<gazebo reference="sensor_link2">
<material>Gazebo/PurpleGlow </material>
</gazebo>
<gazebo reference="sensor_link3">
<material>Gazebo/Grey </material>
</gazebo>
<gazebo reference="r_wheel_link1">
<material>Gazebo/Black </material>
</gazebo>
<gazebo reference="r_wheel_link2">
<material>Gazebo/Black </material>
</gazebo>
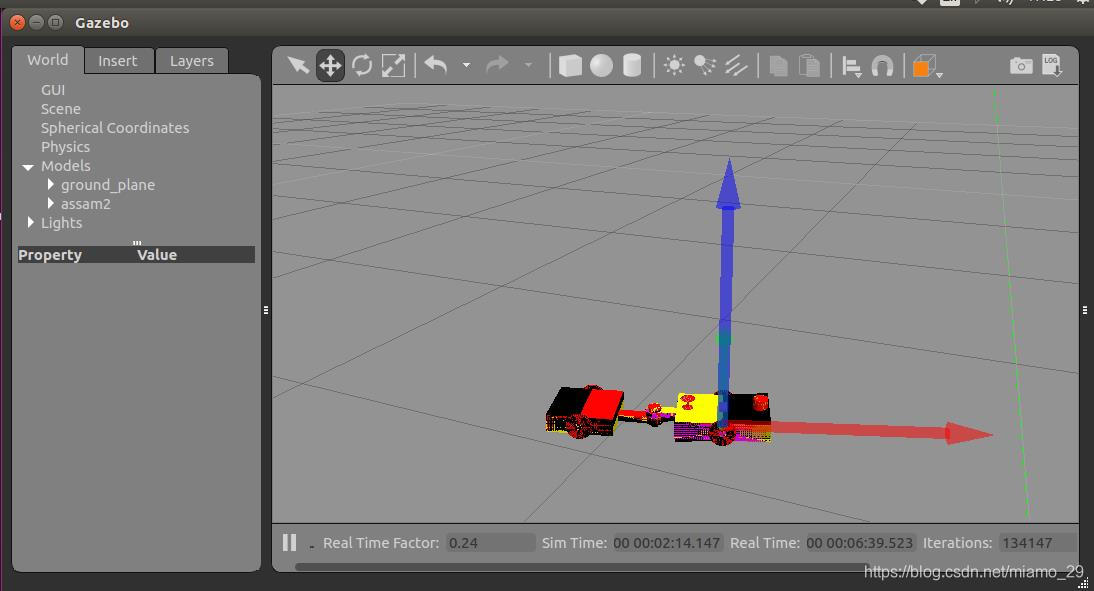
出现图像重叠,是因为在soliworks 里export as urdf 时选择link compoents的时候,选择了多个。更改后就正常显示了。














 7608
7608











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









