







 本文详细介绍了如何解决在Gazebo模拟环境中,通过rostopic pub指令控制机器人运动时遇到的问题。从检查控制节点开始,到确认正确的topic名称,再到使用rostopic info获取类型,最后成功发布消息使机器人移动。
本文详细介绍了如何解决在Gazebo模拟环境中,通过rostopic pub指令控制机器人运动时遇到的问题。从检查控制节点开始,到确认正确的topic名称,再到使用rostopic info获取类型,最后成功发布消息使机器人移动。
1使用rostopic pub给/cmd_vel topic指定了速度,但是gazebo中的模拟机器人并未发生运动
介绍:
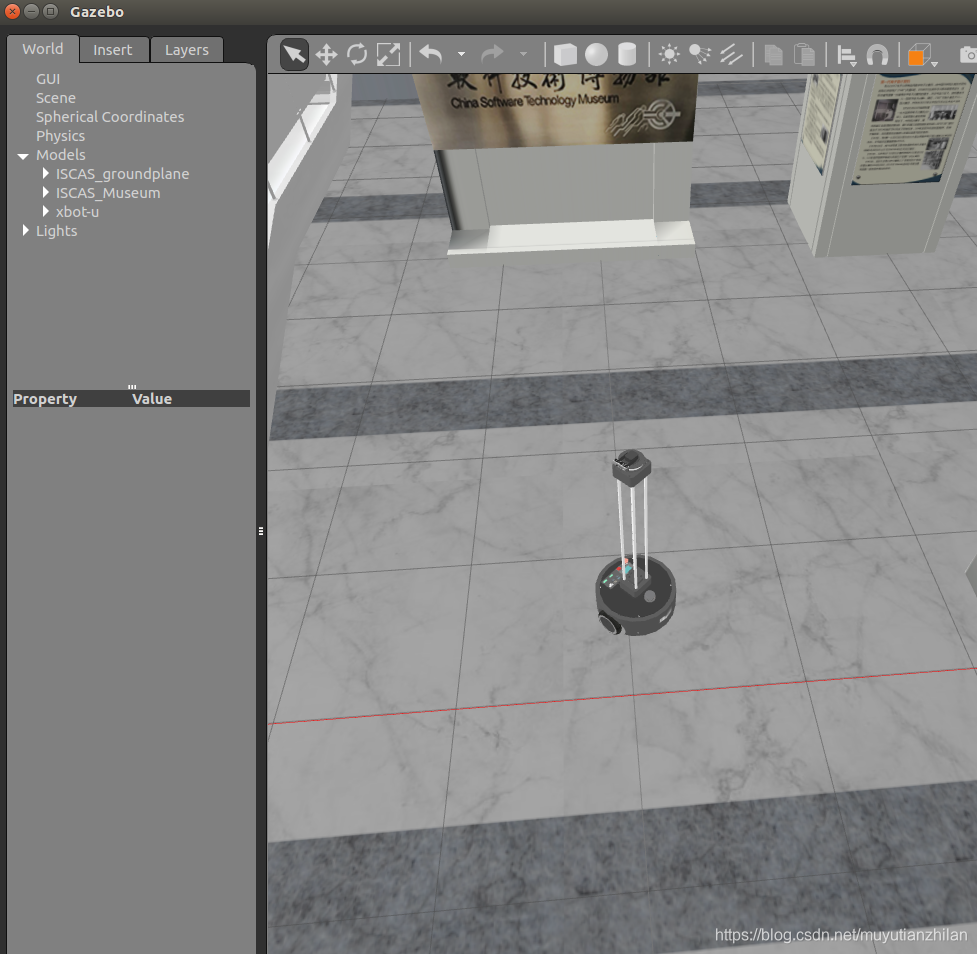
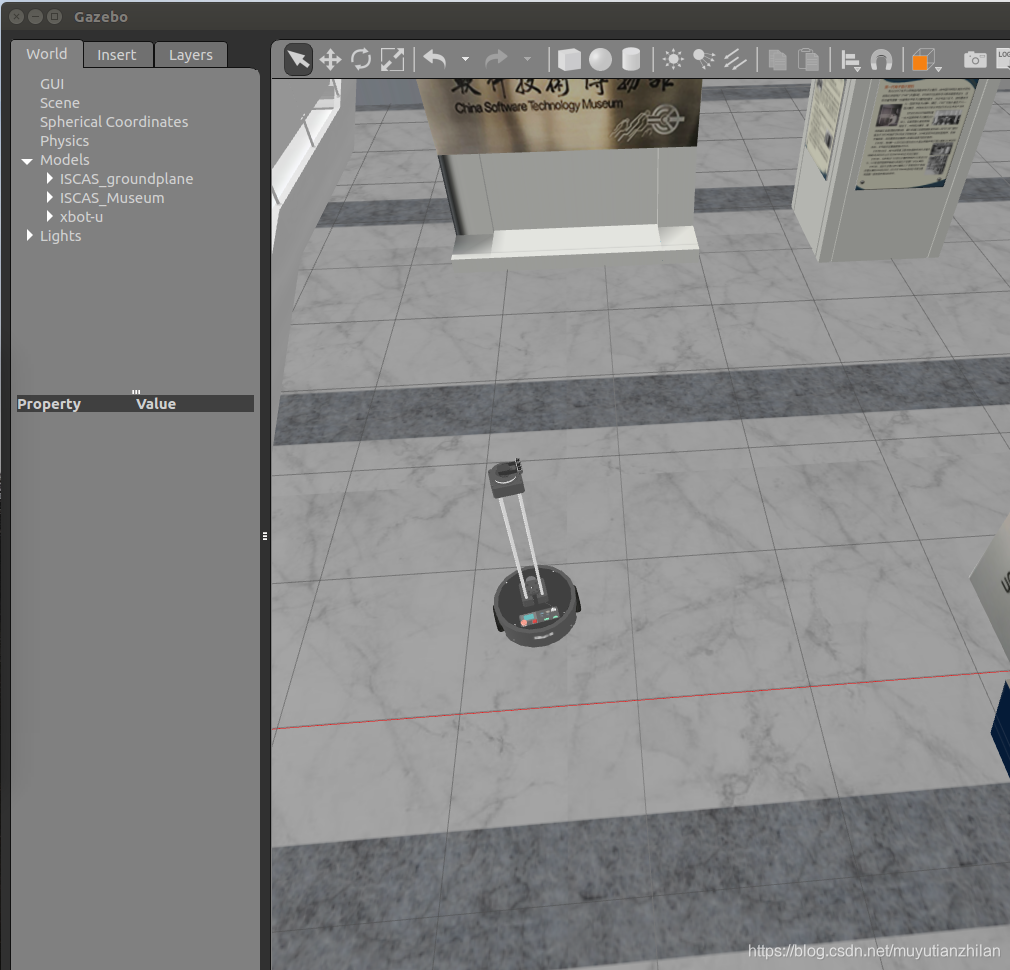
-打开模拟器
- 模拟器打开。记录位置
- 执行命令,就是手动控制小车运动的
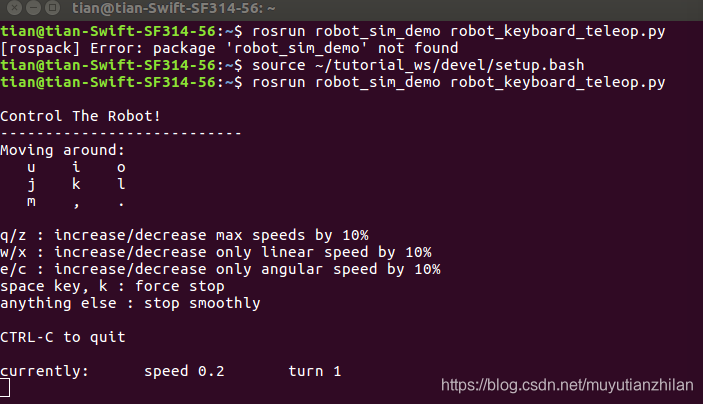
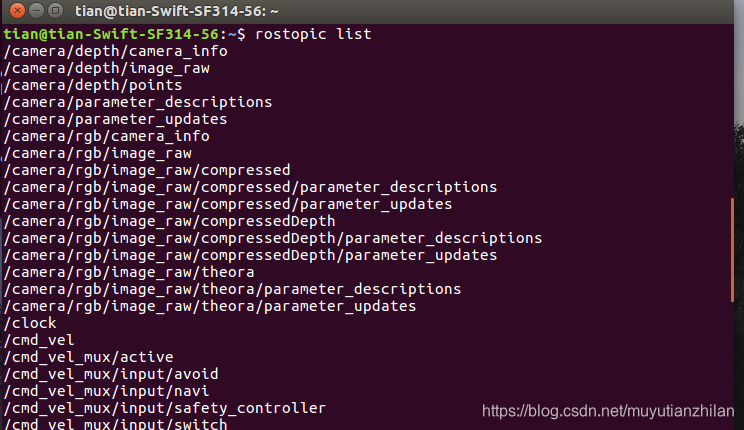
- 查看节点,发现了控制的那个节点(如下如下)/robot_teleop 并 用rosnode info查看 (接下来有没有
发现,publications里边有两个topic,其中的那个叫做/cmd_vel_mux/input/teleop ?)问题就出现在这,
这与讲义上的有可能不一样,出现的topic名字是什么,就用什么。
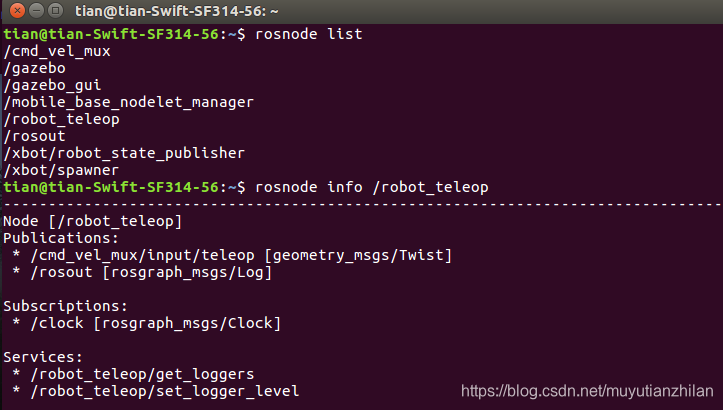
- 打开对应的那个topic,查看信息,命令如下:
rostopic info /cmd_vel_mux/input/teleop
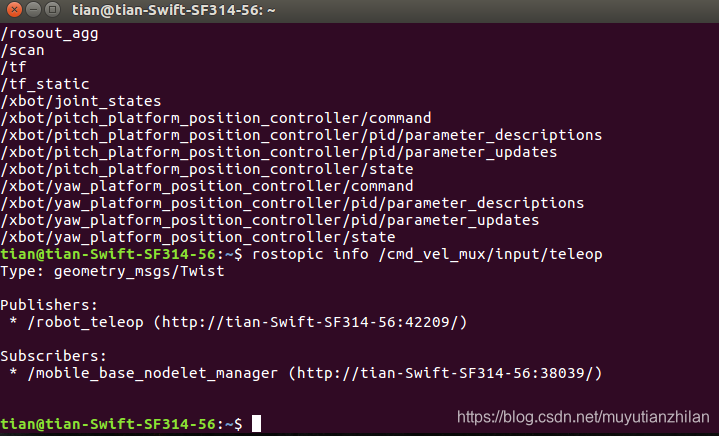
- 发现type类型,直接复制
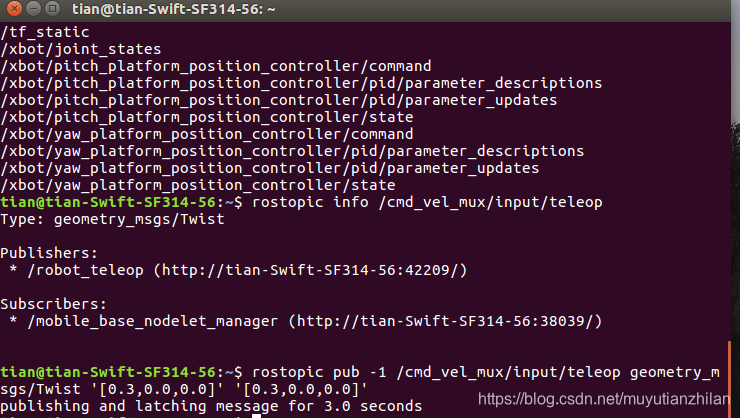
- 接下来再使用rodstopic pub发布消息,就能动啦
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
- 最终结果如下,成功移動!

















 260
260

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









