







一、安装包下载及安装

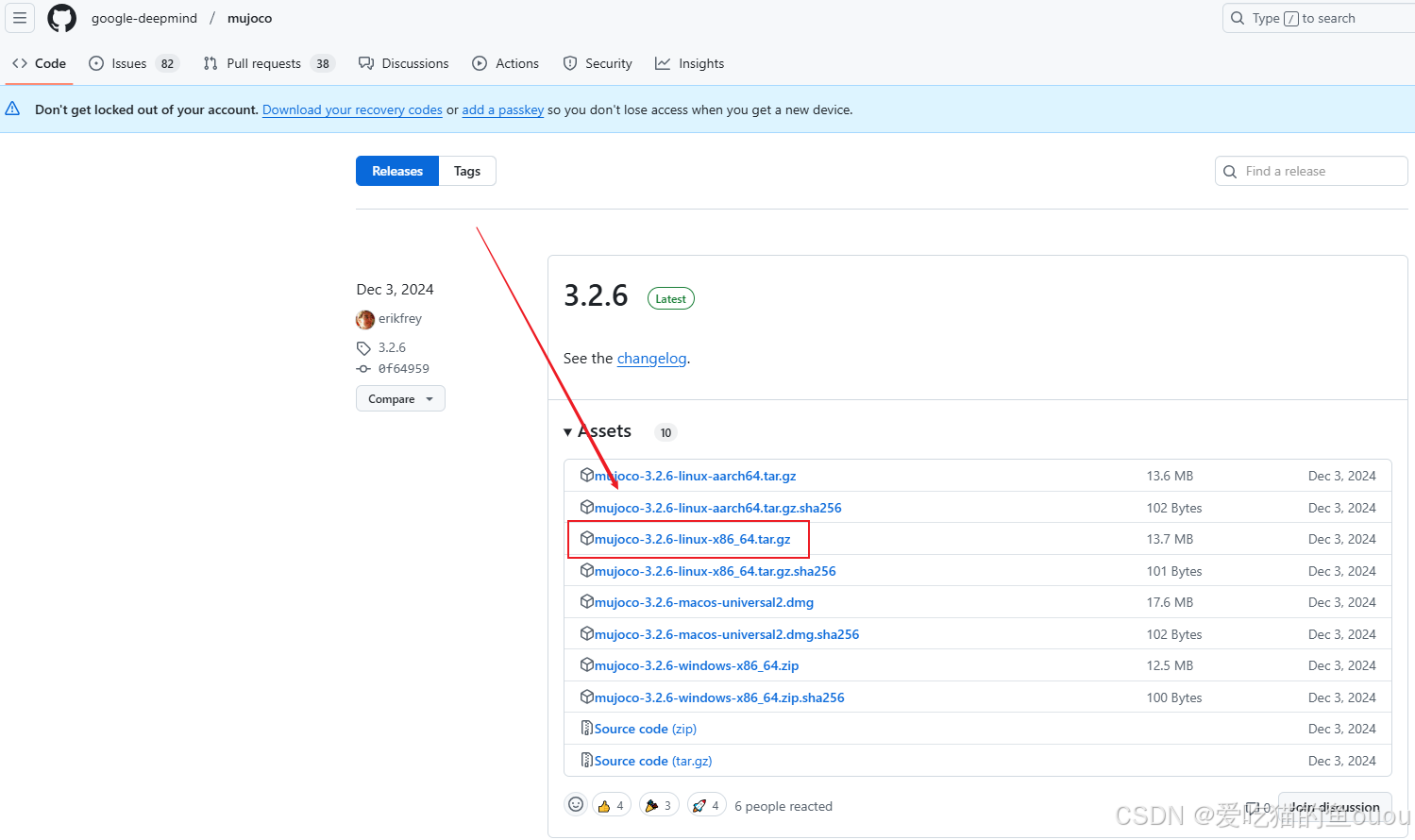
安装其他版本Mujoco,也可参考下面链接(这里安装mujoco-3.2.6)
二、安装测试
(1)mujoco-3.2.6所在目录~/.mujoco
(2)测试安装效果,进入路径,用./simulate打开指定的文件模型
cd ~/.mujoco/mujoco-3.2.6/bin./simulate ../model/humanoid.xml
安装其他版本Mujoco,也可参考下面链接(这里安装mujoco-3.2.6)
(1)mujoco-3.2.6所在目录~/.mujoco
(2)测试安装效果,进入路径,用./simulate打开指定的文件模型
cd ~/.mujoco/mujoco-3.2.6/bin./simulate ../model/humanoid.xml 2150
5856
1849
2347
2150
5856
1849
2347

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























