







为了方便自己记忆,记录一下三维坐标旋转矩阵的推导过程。
坐标的旋转变换在很多地方都会用到,比如机器视觉中的摄像机标定、图像处理中的图像旋转、游戏编程等。
任何维的旋转可以表述为向量与合适尺寸的方阵的乘积。最终一个旋转等价于在另一个不同坐标系下对点位置的重新表述。坐标系旋转角度θ则等同于将目标点围绕坐标原点反方向旋转同样的角度θ。
若以坐标系的三个坐标轴X、Y、Z分别作为旋转轴,则点实际上只在垂直坐标轴的平面上作二维旋转。
假设三维坐标系中的某一向量^{T}") ,其在直角坐标系中的图如图1所示。其中点P在XY平面、XZ平面、YZ平面的投影分别为点M、点P、点N。
,其在直角坐标系中的图如图1所示。其中点P在XY平面、XZ平面、YZ平面的投影分别为点M、点P、点N。
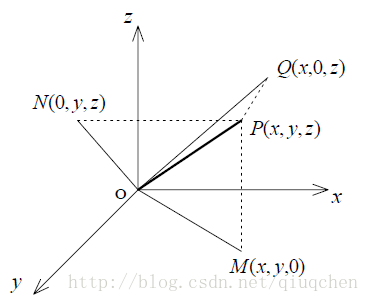
图1 直角坐标系XYZ
一、 绕Z轴旋转θ角
绕Z轴旋转θ角
绕Z轴旋转,相当于在XY平面的投影OM绕原点旋转,如下图所示,OM旋转θ角到OM'。
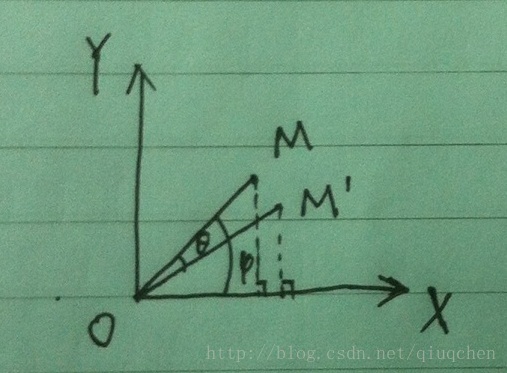
图2 向量绕Z轴旋转示意图
设旋转前的坐标为^{T}") ,旋转后的坐标为
,旋转后的坐标为^{T}") ,则点M的坐标为
,则点M的坐标为^{T}") ,点M'的坐标为
,点M'的坐标为^{T}") 。由此可得:
。由此可得:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5469
5469











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









