






 文章概述了雷达技术从20世纪30年代至今的四个发展阶段,强调了每代雷达在硬件和功能上的进步,如相参技术、大规模集成电路和相控阵的应用。同时,详细介绍了目标识别技术的发展,包括窄带识别、微多普勒识别、一维和二维像识别、极化识别等,以及支持向量机在识别中的应用。
文章概述了雷达技术从20世纪30年代至今的四个发展阶段,强调了每代雷达在硬件和功能上的进步,如相参技术、大规模集成电路和相控阵的应用。同时,详细介绍了目标识别技术的发展,包括窄带识别、微多普勒识别、一维和二维像识别、极化识别等,以及支持向量机在识别中的应用。
雷达技术发展历史
雷达硬件发展情况
第一代:20世纪30年代~50年代
目的:指挥和引导已方作战飞机以及各种地面防空武器
米波段雷达和以磁控管为发射机的微波雷达,特点:电子管,非相参
第二代:20世纪50年代~80年代
目的:防空作战对雷达提出了由粗略定位到精确引导的要求,直升机、超音速作战飞机等目标种类大量出现,各种远距离支援和随队干扰手段已成为一种基本作战样式
全相参微波雷达,发射机大量使用速调管、行波管、前向波管等,特点:半导体、全相参
第三代:20世纪80年代~20世纪末
目的:为满足现代空战对雷达高精度、高分辨力、高抗干扰能力、多目标跟踪能力、高可靠性和维修性的要求,有效应对复杂电磁环境下探测低空巡航导弹、超音速第3代战机、高空无人飞机等的要求
特点:大规模集成电路、全固态、相控阵技术
第四代:20世纪末~今
目的:隐身目标、低空低速和高空高速巡航导弹以及无人作战飞机等目标的出现、电磁环境的日益恶劣
特点:多功能、自适应、目标识别
第五代:未来
特点:网络化、协同化、智能化
MIMO雷达、认知雷达和凝视雷达
目标识别技术发展进展
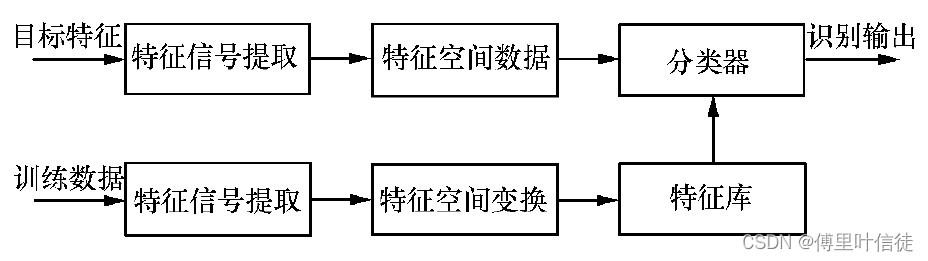
目标识别总体框图如下
常见的识别应用
窄带雷达识别直升机、螺旋桨飞机和喷气式飞机
典型的利用目标的发动机调制(JEM)特征差异进行目标识别的应用
以某跟踪制导雷达为例,首先获得目标的多脉冲回波数据,提取该数据的JEM特征,再利用图1所示的流程进行目标识别。提取的JEM特征包括频域波形熵和相移散射角特征,并结合目标的高度、速度和加速度信息,采用支持向量机(SVM)方法进行目标识别。下图给出了不同信噪比情况下的平均识别概率的实验情况。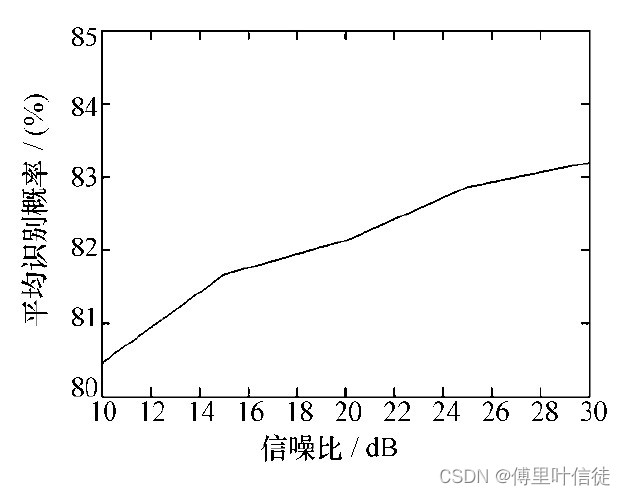
基于微动特征的弹道导弹目标识别
以某地基雷达为例,首先利用时频分析方法获得目标的微动时频二维像,再提取目标的瞬时频率、频域方差、图像熵等特征,采用SVM方法进行目标识别。下图给出了仿真的弹头、诱饵和球形目标的二维特征空间情况,3类目标能够得到很好的区分。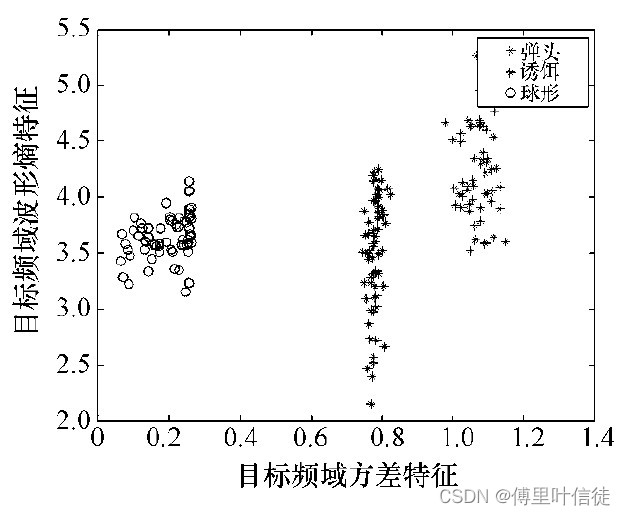
基于一维距离像的飞机目标识别
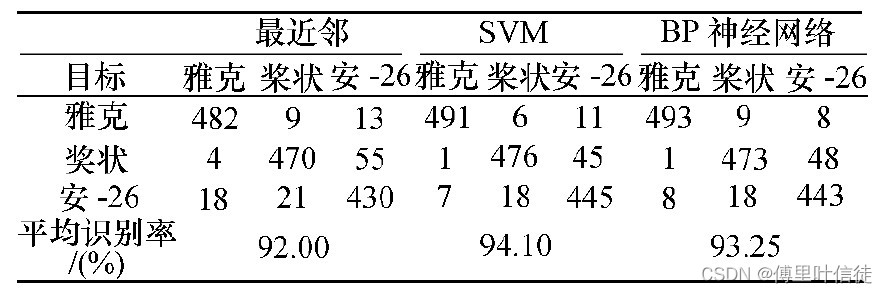
以某目标特性测量雷达为例,首先获得目标的一维距离像,消除一维距离像的方位、平移和幅度敏感性,再对其进行降噪和归一化等预处理,提取尺寸、波形熵、中心矩和双谱等特征,采用目标分类器进行识别,可以对雅克、桨状飞机和安-26飞机进行识别。下表给出了基于中心矩和波形熵组合特征的识别率。
雷达目标识别技术研究进展
几十年来,雷达目标识别技术的研究手段逐步丰富。从识别手段上看,雷达目标识别大体可以分为常规窄带雷达的识别,宽带成像雷达的一维、二维像识别,极化雷达的极化识别,还有微多普勒识别,基于轨道特征的识别,综合多种特征的目标识别,多传感器的融合识别等。
从工程实现的角度讲,由于特征获取相对容易,常规窄带识别和一维像识别备受青睐。微多普勒识别是近年来兴起的新的研究方向,使雷达能够通过获取目标的微运动来识别目标。极化识别是一个较为独立的识别领域,由于极化雷达的研制代价和难度大,极化识别方面理论研究较多,真正用于雷达系统上的较少。基于SAR和ISAR二维图像的识别也是研究热点。基于轨道特征的识别,常用于弹道目标、卫星和常规目标的分类。综合多种特征的目标识别和多传感器的融合识别都属于更精细化的目标识别,需要获得目标的多种特征,也能够识别更多类型的目标。
窄带目标识别 1934年
窄带雷达识别目标通常采用目标高度、速度、加速度、敌我识别信息、RCS及其起伏特性、频谱特征、JEM调制等特征,对于舰船目标还可以采用轮廓图方法。
微多普勒目标识别
一维像目标识别
二维像目标识别
极化目标识别
轨道特征目标识别
无源识别
综合目标识别
目标识别特征库
参考文献
[1]郭建明,谭怀英.雷达技术发展综述及第5代雷达初探[J].现代雷达,2012,34(02):1-3+7.DOI:10.16592/j.cnki.1004-7859.2012.02.007.
[2]李明.雷达目标识别技术研究进展及发展趋势分析[J].现代雷达,2010,32(10):1-8.DOI:10.16592/j.cnki.1004-7859.2010.10.004.

















 3384
3384

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









