







 超级会员免费看
超级会员免费看
 在使用Cartographer进行离线建图时遇到数据_.trajectory_nodes.SizeOfTrajectoryOrZero错误,该错误源于imu数据缺失。解决方法包括重新设置imu确保提供重力数据,或在配置文件和launch文件中注释掉imu相关部分。
在使用Cartographer进行离线建图时遇到数据_.trajectory_nodes.SizeOfTrajectoryOrZero错误,该错误源于imu数据缺失。解决方法包括重新设置imu确保提供重力数据,或在配置文件和launch文件中注释掉imu相关部分。
cartographer离线建图报错: data_.trajectory_nodes.SizeOfTrajectoryOrZero
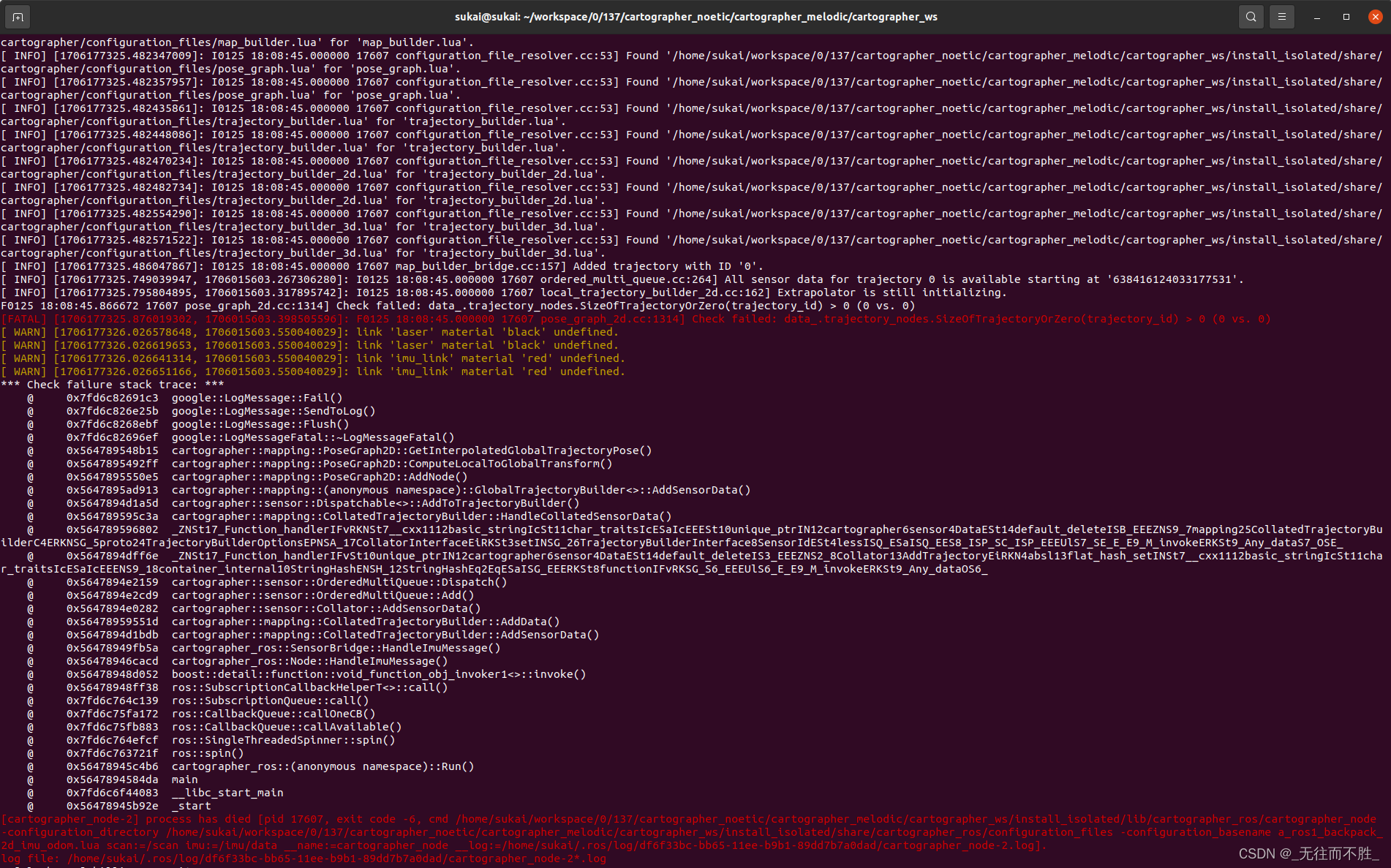
[FATAL] [1706177325.876019302, 1706015603.398505596]: F0125 18:08:45.000000 17607 pose_graph_2d.cc:1314] Check failed: data_.trajectory_nodes.SizeOfTrajectoryOrZero(trajectory_id) > 0 (0 vs. 0)
[cartographer_node-2] process has died [pid 17607, exit code -6, cmd /home/sukai/workspace/0/137/cartographer_noetic/cartographer_melodic/cartographer_ws/install_isolated/lib/cartographer_ros/cartographer_node -configuration_directory

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1822
1822

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











