







Arduino智能小车——拼装篇
Arduino智能小车系列教程时空门:
- Arduino智能小车——拼装篇 点击跳转
- Arduino智能小车——测试篇 点击跳转
- Arduino智能小车——调速篇 点击跳转
- Arduino智能小车——超声波避障 点击跳转
- Arduino智能小车——蓝牙小车 点击跳转
- Arduino智能小车——循迹篇 点击跳转
- Arduino智能小车——小车测速 点击跳转
简介
Arduino是一款便捷灵活、方便上手的开源电子原型平台,比较适合刚接触硬件的入门级开发者学习。在我身边有很多初学者都陷入了这么一种困境,已经将Arduino官网的教程全部跑完,然而还是没有太大的成就感,看到网上大神们基于Arduino各种各样的开发很羡慕,想动手做小项目又不知从何下手。由于网上较少看到完整项目开发流程,作为一个有较多嵌入式开发经验的“老江湖”,在此想自己综合自己的多年的开发经验,为以后的新人铺一条路。
作为Arduino的第一个项目,我比较建议朋友们去做一下智能小车。优点如下:
1.可以熟悉做项目的大概流程,为以后的开发生涯奠定基础;
2.需要自己动手拼装制作,完成后有满满的成就感;
3.小车作为一个基本的开发平台,可以在上面搭建各种传感器,自定义功能;
4.相对于四旋翼等安全系数高,技术能力要求较低,适合初学者;
初学的朋友们入手一套智能小车套件,某宝上搜智能小车可以看到很多,再根据需要购买一些模块。
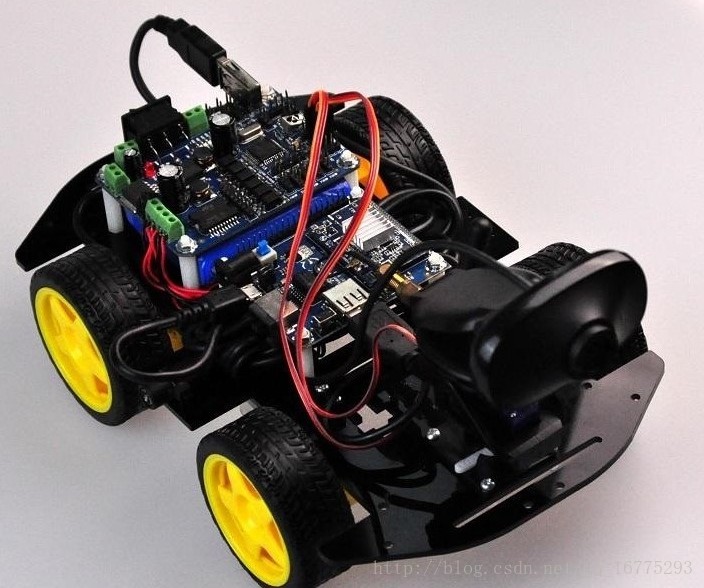 我们准备制作的小车终极形态就类似这种,觉得很帅的话就快开始动手做吧!!!
我们准备制作的小车终极形态就类似这种,觉得很帅的话就快开始动手做吧!!!
准备材料
智能小车的基本构成组件如下:
小车套件:

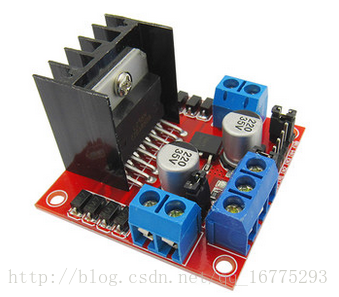
驱动模块:(在此我选用比较经典的驱动模块L298N,该驱动可以满足我们的需求,也可以把电池的高电压转换为我们需要的5V,3.3V电压)
电池:(在此我选用的电池型号是18650)

电池座:(电池座一定要选取与电池型号相匹配)

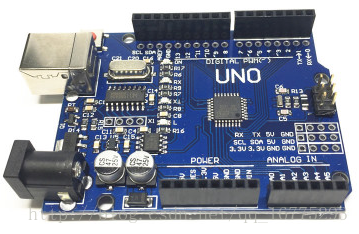
当然Arduino板子也肯定必不可少,在此我使用的是Arduino UNO,其他版本的Arduino也可以参照该教程
做项目开发肯定少不了电烙铁,焊锡,电源线,杜邦线,排针,排插这些基本工具。
至此,所需的基本材料已经准备完毕,接下来就可以进行小车的拼装了。
拼装步骤
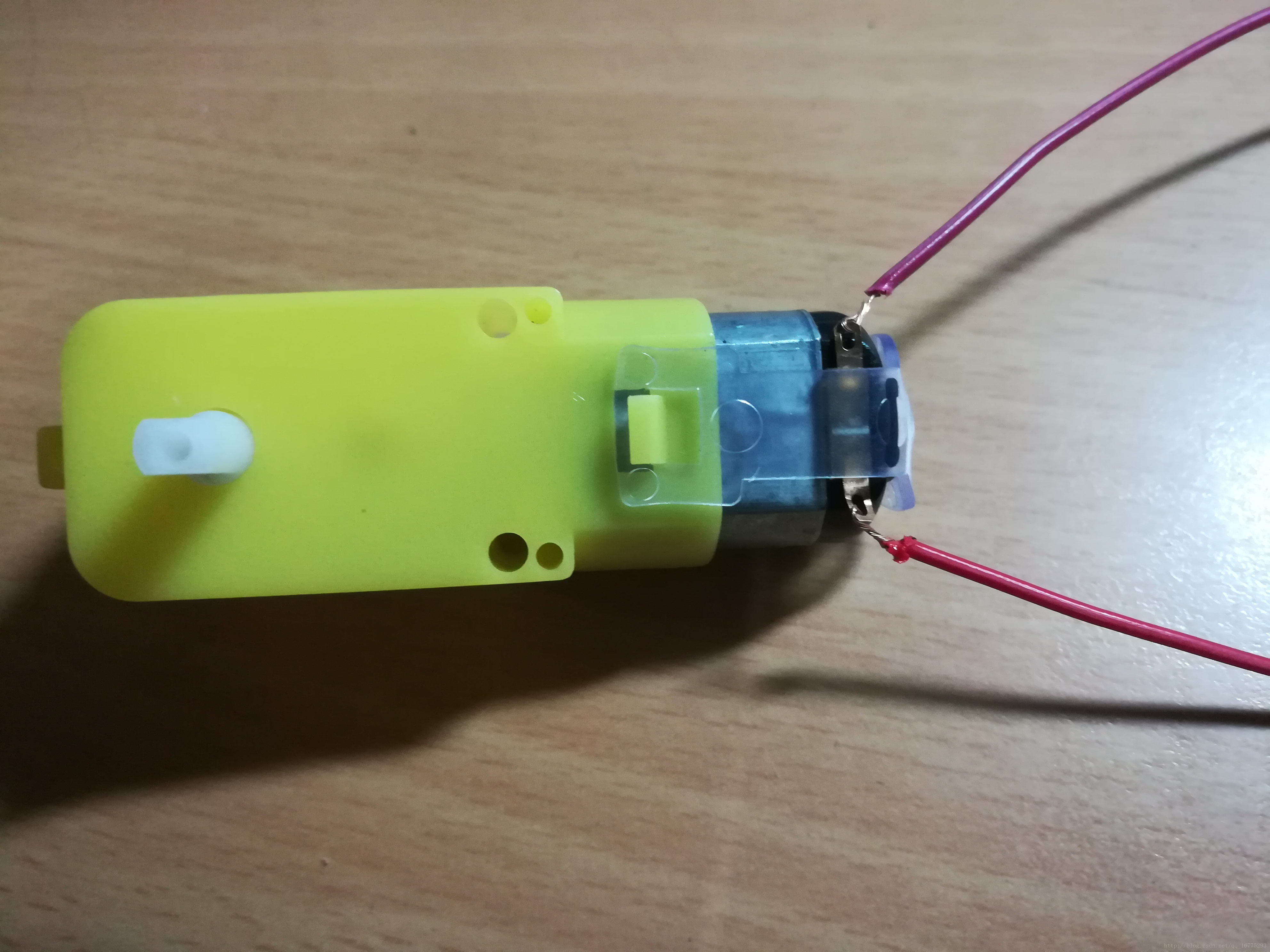
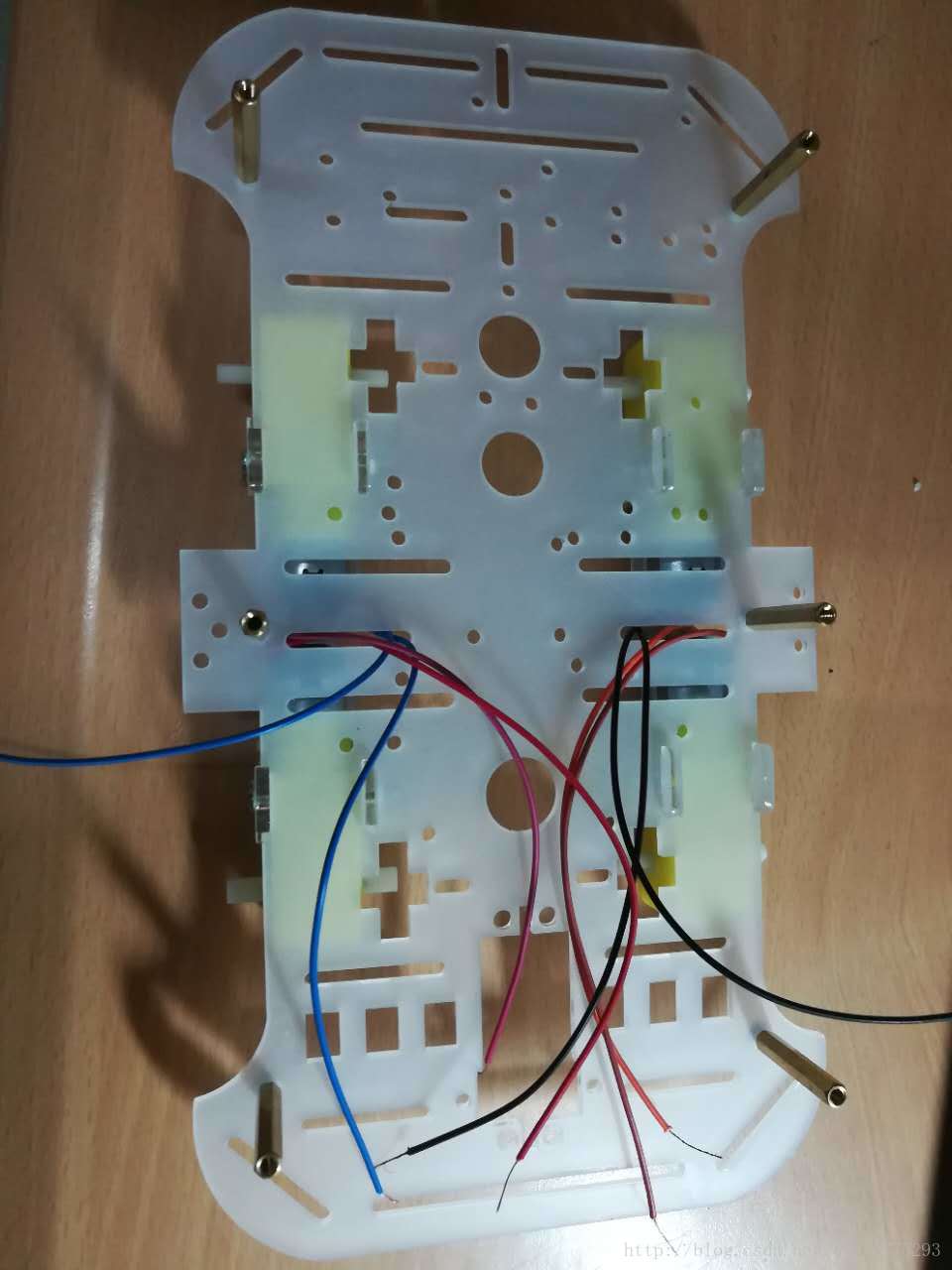
电机线的焊接
套件中的电机一般都是没有连线的,我们需要自己动手把准备好的电源线固定在电机上,一般不建议直接把电源线绑在电机上,这样会经常导致小车的电机接触不良,因此我建议大家把电源线直接焊在电机上。
电机固定

将上图所示的电机固定架插入小车底盘底板中,一般小车有上下两个底板,任意拿一块即可当做底板。
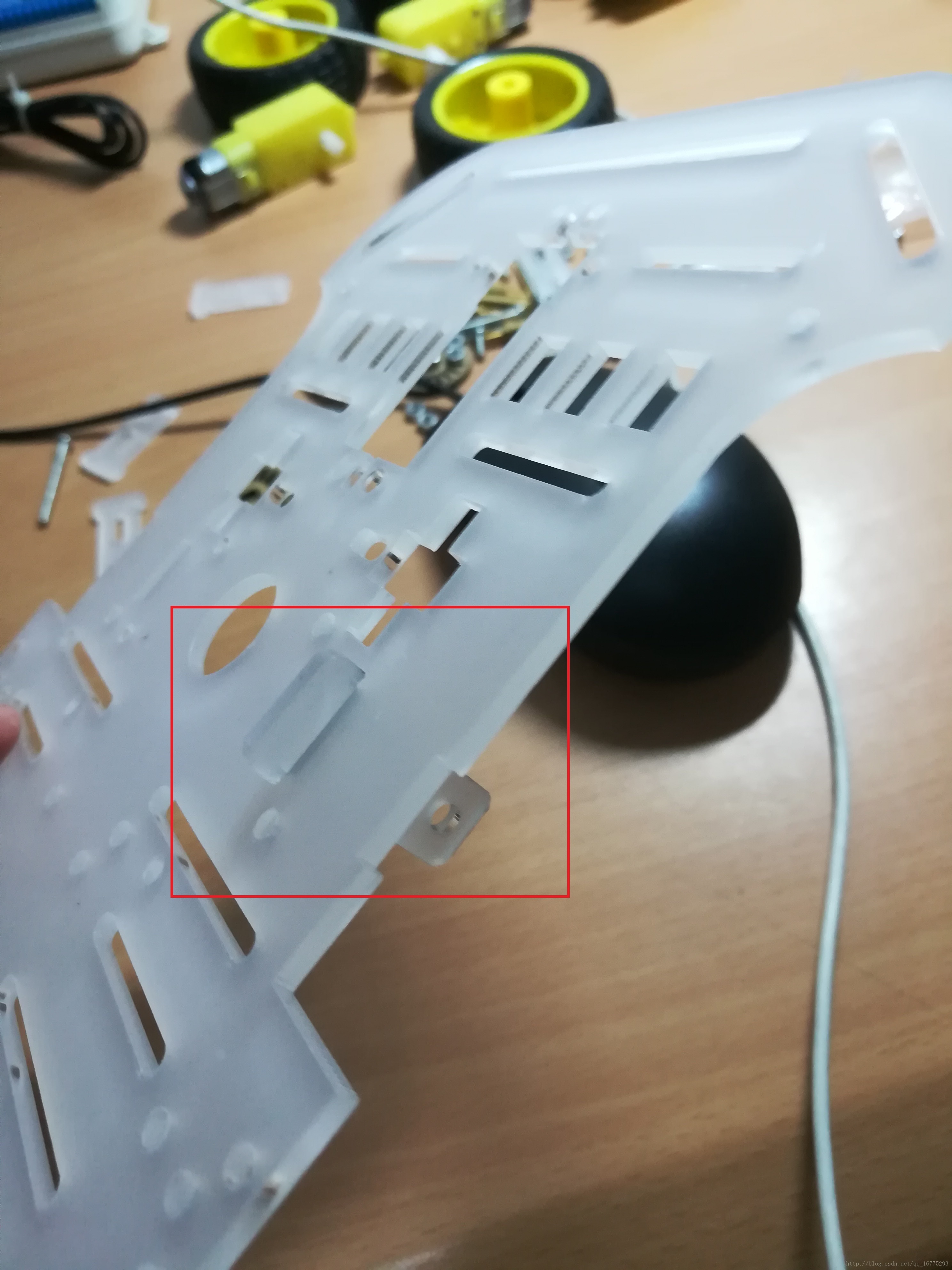
再将焊接好的电机配套另外一个固定架固定在底板上。

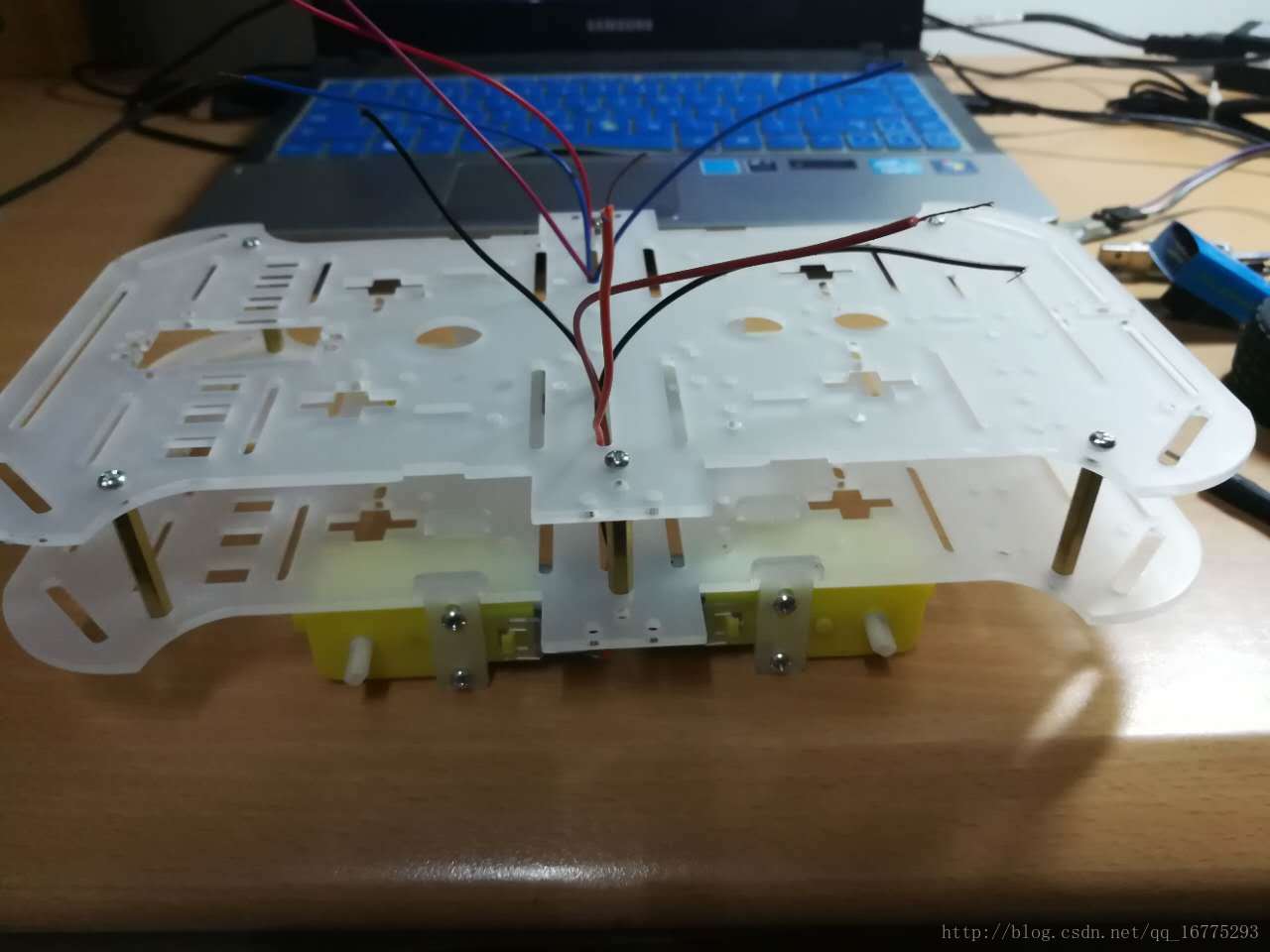
同样固定其他三个电机

安装背板支柱
安装背板
一般套件都会提供六根铜柱,我们将其固定在小车的周围。
安装轮子
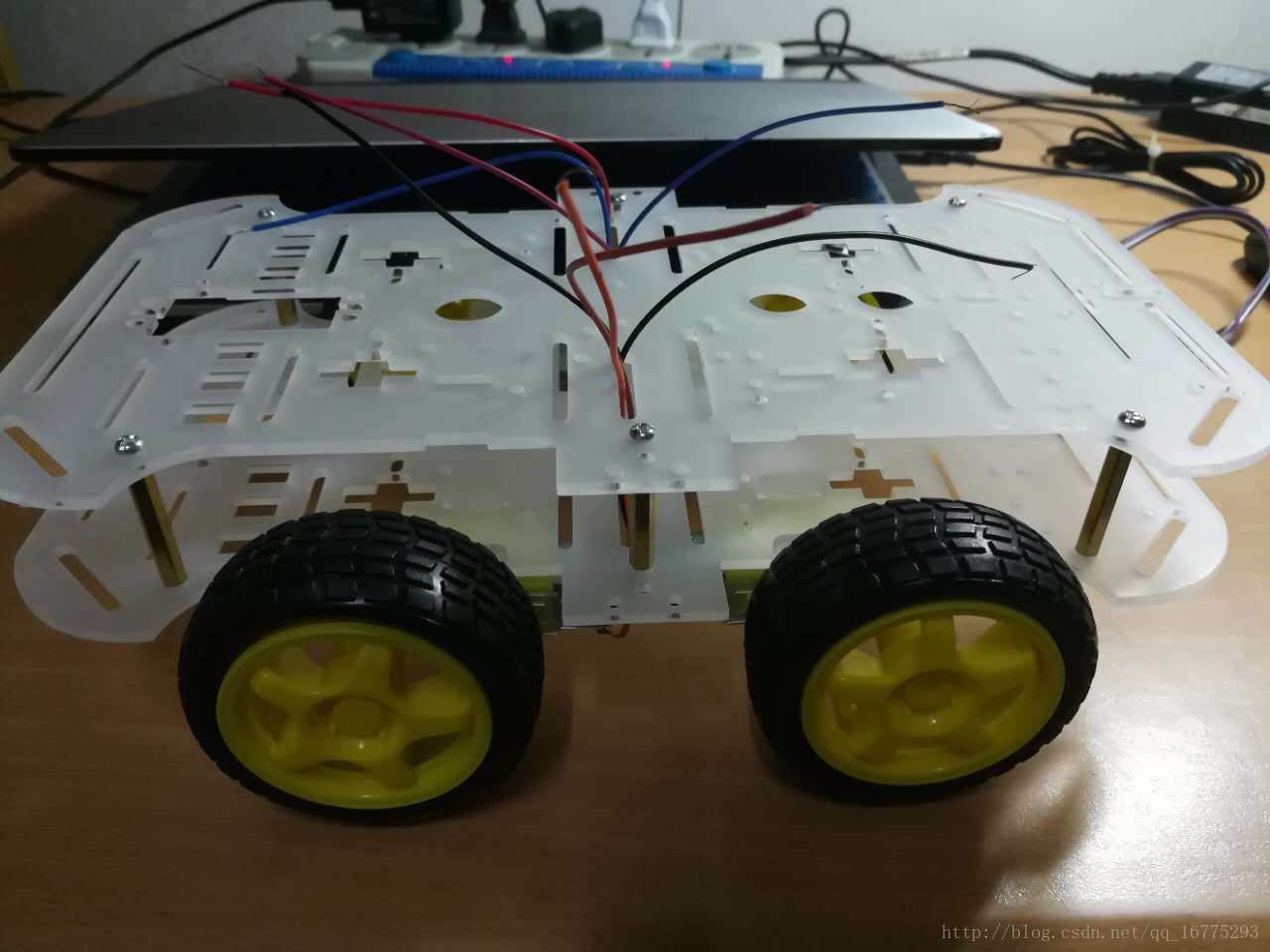
总结
至此小车的基本拼装已经完成,小车驱动、电池等其他模块的安装,以及小车的调试将在接下来的教程中为大家依次讲解。
欢迎各位朋友添加Q群交流:789127261

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









