







文章目录
SVO SLAM剖析
1 论文解析 ICRA2014
1.1 架构
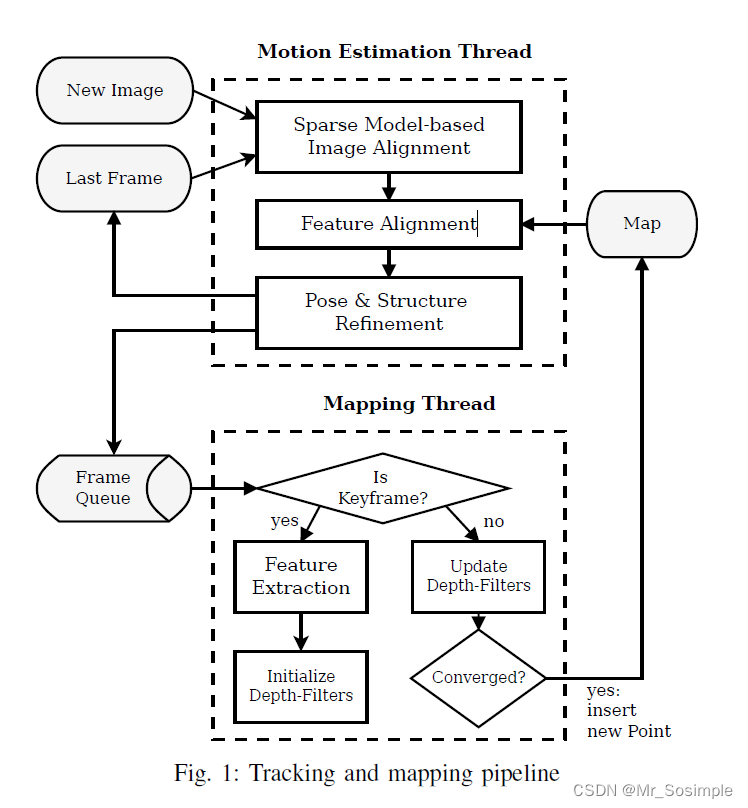
双线程:实时跟踪(相对运动估计)线程 + 建图线程
1.2 运动估计线程
运动估计线程:跟踪时,(1)根据直接法(光度误差)计算一个初始的相对姿态变化和特征匹配;(2)再使用基于特征的重投影误差进行最小二乘优化。
A 稀疏图像对齐(Model-Based)
连续帧对齐
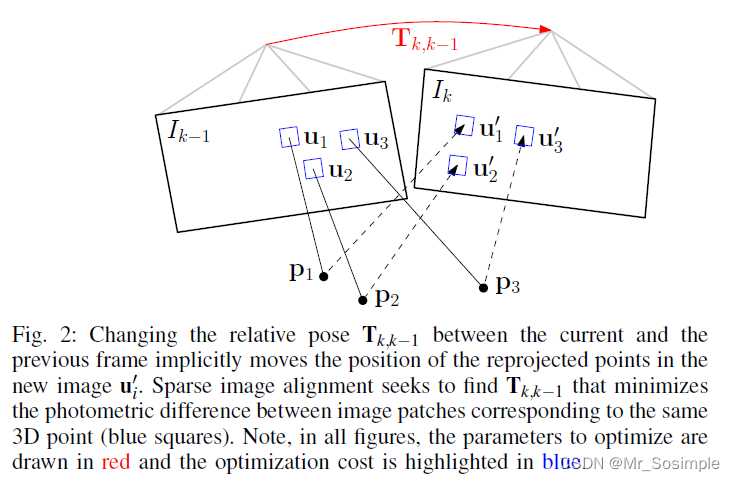
该步骤隐含了极线约束,因此没有诸如特征点匹配等方法带来的外点,因此也无需外点剔除。
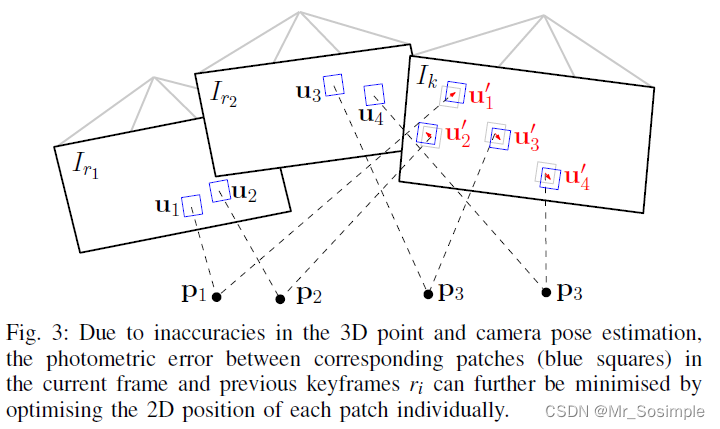
B 松弛步:关键帧特征对齐
通过和关键帧的关联,该步骤减小了漂移误差。
- 对图像Patch仿射变换,因为用了更大的patch(8*8)且
当前帧和关联关键帧位姿差较大。关联关键帧选取:以最小观测角观测到该点的关键帧。 - 对每个点独立进行光度误差优化,没有考虑极线约束。(松弛)
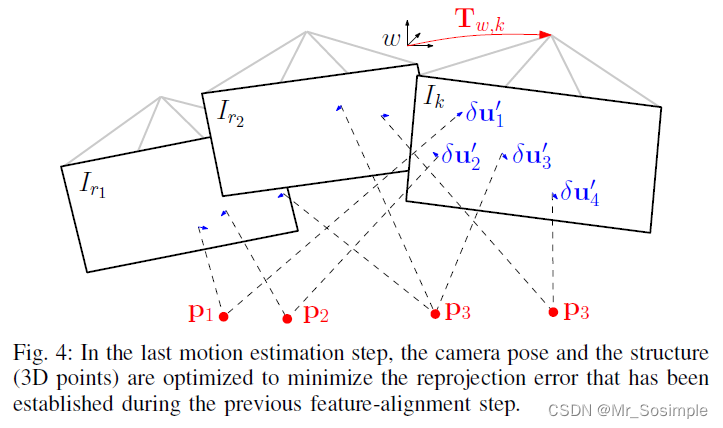
C 位姿和特征点优化
前两步建立了特征点配对后,优化位姿和特征点。分为三步:
- 仅优化当前帧位姿(根据重投影误差)
- 仅优化3D点
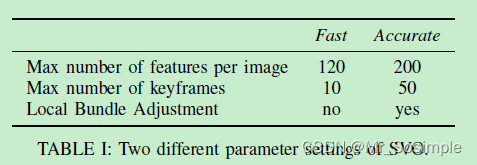
- LocalBA:优化多帧关键帧和地图点(在快速模式下该步骤省略)
1.3 建图线程
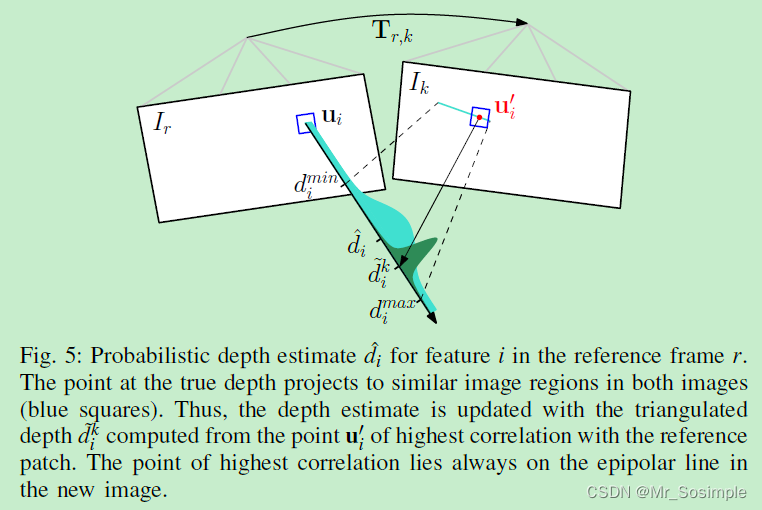
贝叶斯理论框架下的深度滤波器
SVO1.0认为深度滤波器给精度、速度、鲁棒性均带来了重要的正面作用。
深度滤波器的理论细节参考文献:
Vogiatzis, G., & Hernández, C. (2011). Video-based, real-time multi-view stereo. Image and Vision Computing, 29(7), 434-441.
SVO1.0中的建图线程只维护了固定数量的关键帧,本质上是一个局部地图:
Q:如何将该局部地图拓展为全局地图,或如何与全局地图结合。
2 要点
2.1 反向固定雅克比
TOD
2.2 直接在畸变图上进行跟踪
TOD
2.3 深度滤波器
SVO1.0 深度滤波器主要来自于以下文献,不同点在于使用了逆深度:
深度滤波器文献:Vogiatzis, G., & Hernández, C. (2011). Video-based, real-time multi-view stereo. Image and Vision Computing, 29(7), 434-441.
上述论文的增补材料在:https://george-vogiatzis.org/
增补材料中的错误:https://github.com/uzh-rpg/rpg_svo/issues/102
后面主要讲解上述文献。
A 高斯-均匀混合模型
深度的分布特点从下图中可见一斑:真值只有一个,但是NCC的局部最大值有很多,且基本呈均匀分布。(考虑:如果不用NCC匹配,外点的分布符合什么模型?)
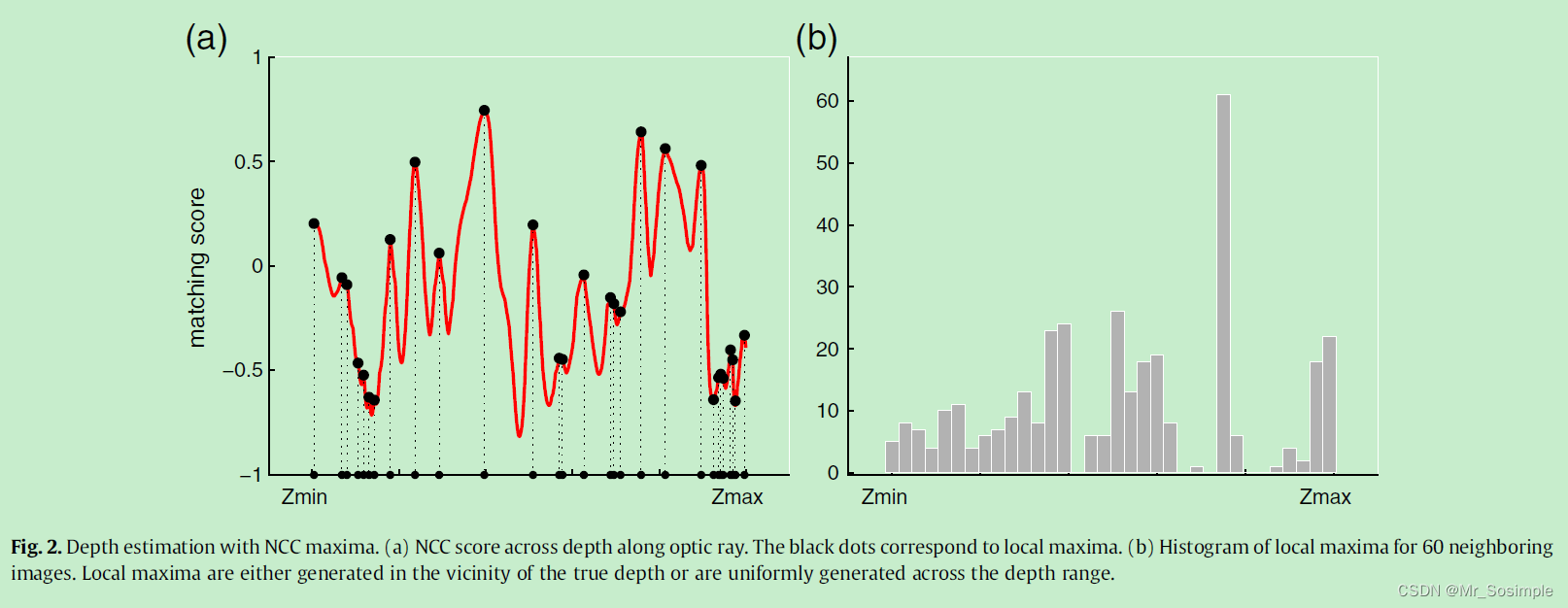
基于上述insight,本文将随机变量深度建模为高斯-均匀混合概率分布模型。解决单一正态分布对外点非常敏感(造成外点的原因可能是遮挡、重复纹理等)的问题。(为了建模外点,一般在正态分布中加入均匀分布)
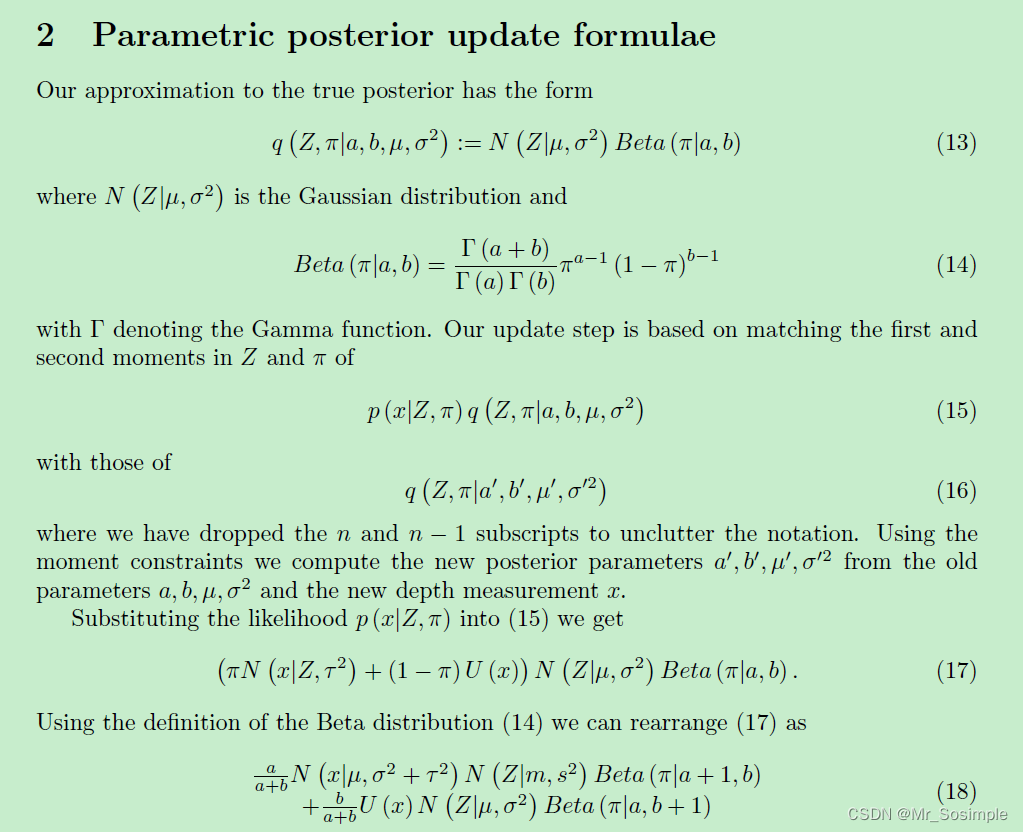
B 基于贝叶斯框架的滤波更新
贝叶斯推断

其中:第一项是内点情况下的似然概率(给定Z、方差,出现xn观测的概率)

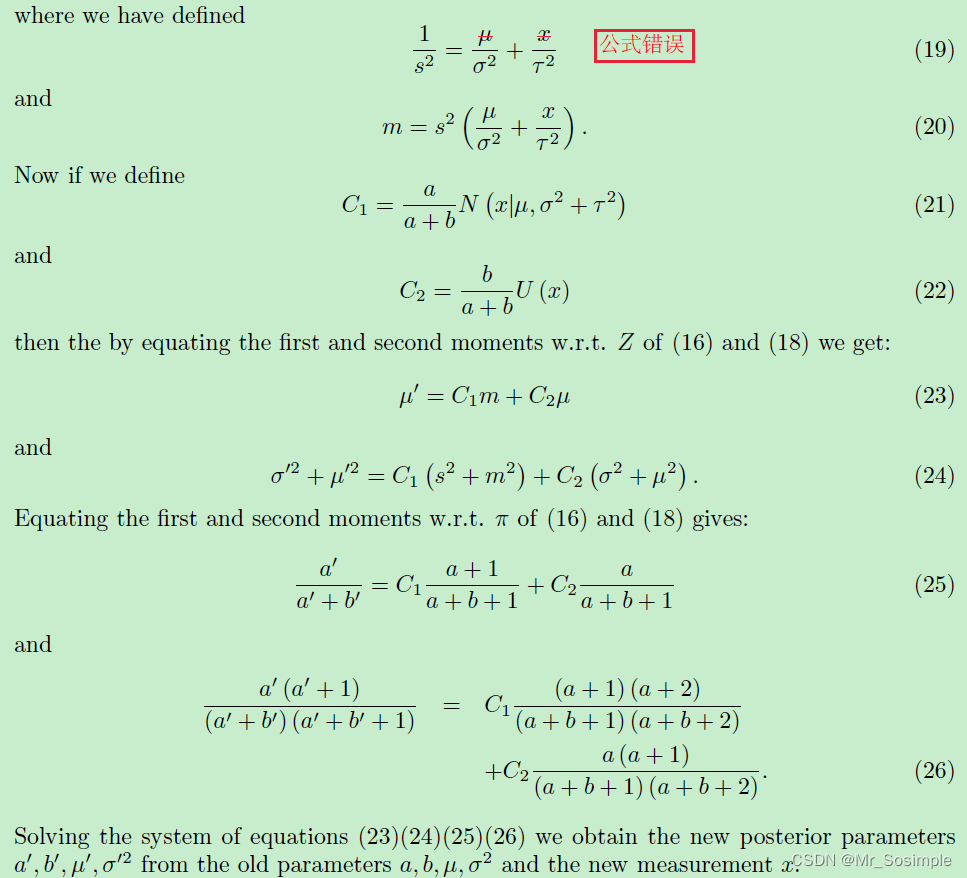
文中使用 高斯*Beta分布来近似上述高斯均匀混合模型后验概率。
对于每一个新的观测(深度,深度的方差)过来,会对原来的分布进行更新(更新随机变量-深度、均值、方差、a、b)。推导过程:
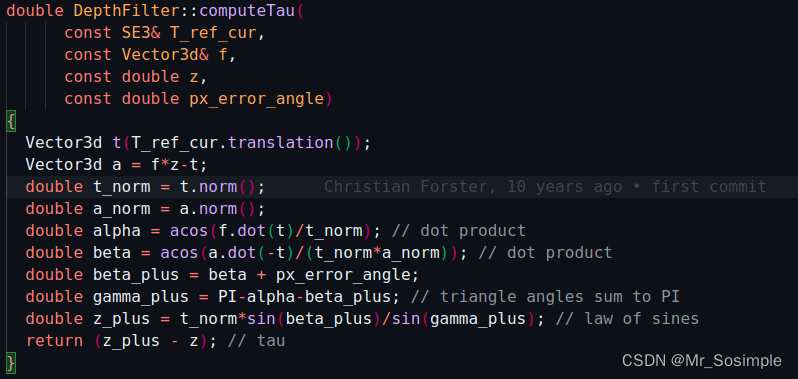
新到来的观测深度的方差(标准差)由像素的观测误差推导出来(可以参考SLAM十四讲12.2.3),SVO1.0代码为:
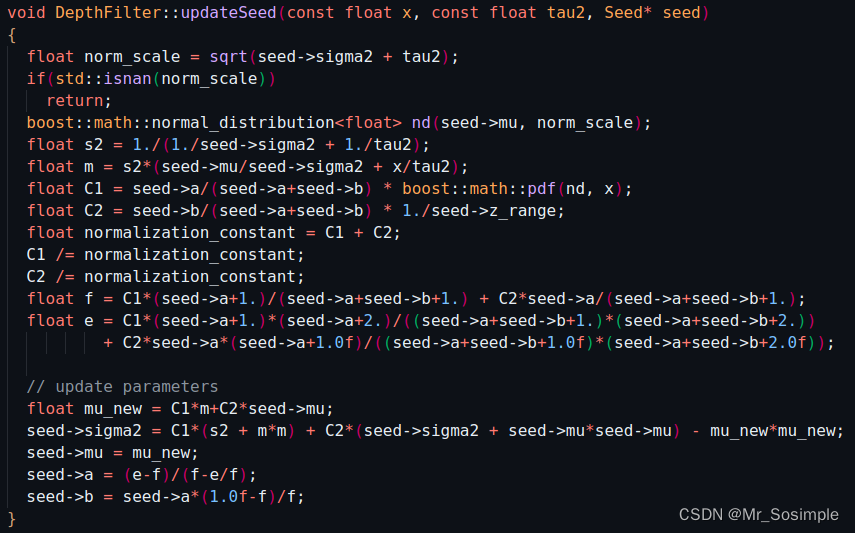
更新概率模型参数SVO1.0代码:
区别于svo1.0,svo pro 使用两种模型来供选择:
- 一种使用vogiatzis提出的Gaussian+ Uniform混合模型
- 第二种可以选择使用单独Gaussian模型
3 参考
- SVO详细解读:https://www.cnblogs.com/ilekoaiq/p/8659631.html
- 原版SVO:https://github.com/uzh-rpg/rpg_svo
- SVO文献:Forster, C., Pizzoli, M., & Scaramuzza, D. (2014, May). SVO: Fast semi-direct monocular visual odometry. In 2014 IEEE international conference on robotics and automation (ICRA) (pp. 15-22). IEEE.
- SVO文献:Forster, C., Zhang, Z., Gassner, M., Werlberger, M., & Scaramuzza, D. (2016). SVO: Semidirect visual odometry for monocular and multicamera systems. IEEE Transactions on Robotics, 33(2), 249-265.
- 深度滤波器文献:Vogiatzis, G., & Hernández, C. (2011). Video-based, real-time multi-view stereo. Image and Vision Computing, 29(7), 434-441.
- 白话SVO2.0: https://zhuanlan.zhihu.com/p/505521734















 252
252

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









