







1. 下载工作空间:
链接:链接: https://pan.baidu.com/s/1V7XmaYi1ZXb85dDbuFN5OQ?pwd=sqw8 提取码: sqw8
其中包含了Velodyne雷达、阿路比imu和scout_mini的驱动
2. 安装必要依赖
sudo apt install -y libasio-dev
sudo apt install -y ros-$ROS_DISTRO-teleop-twist-keyboard
ROS_DISTRO:自己的ROS版本
3. 编译工作空间(catkin_ws)
可能提示缺少依赖,安装提示安装即可
4. 设置 CAN-To-USB 适配器
step0:
cd sensor_ws
source devel/setup.bash
step1:启用 gs_usb 内核模块
sudo modprobe gs_usb
step2:首次使用 Scout-ros 套装
rosrun scout_bringup setup_can2usb.bash
step3:如果不是第一次使用,请使用 scout-ros 软件包(每次关闭电源时都运行此命令)
rosrun scout_bringup bringup_can2usb.bash
step4:测试命令
receiving data from can0
candump can0
step5:启动基本节点
roslaunch scout_bringup scout_mini_robot_base.launch
step6:再启动键盘节点(务必在开阔场地使用该节点!!!)
roslaunch scout_bringup scout_teleop_keyboard.launch
上述step走完还不行,那么重启一下底盘再试试!!!
5. 测试imu
cd sensor_ws
source devel/setup.bash
sudo chmod 666 /dev/ttyUSB0
roslaunch openzen_sensor my_lpms_ig1.launch
rostopic echo /imu/data
/imu/data 话题有数据则安装成功。
6. 配置并使用 Velodyned 雷达
step1:插上雷达网线
step2:设置
- 进ubuntu设置-网络-有线设置(齿轮)
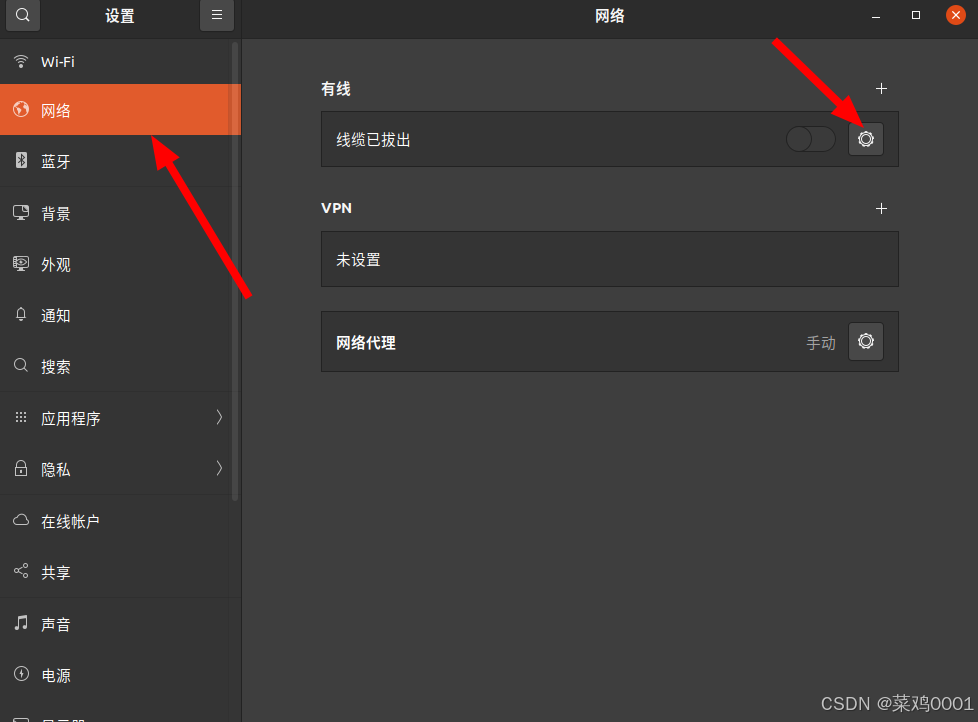
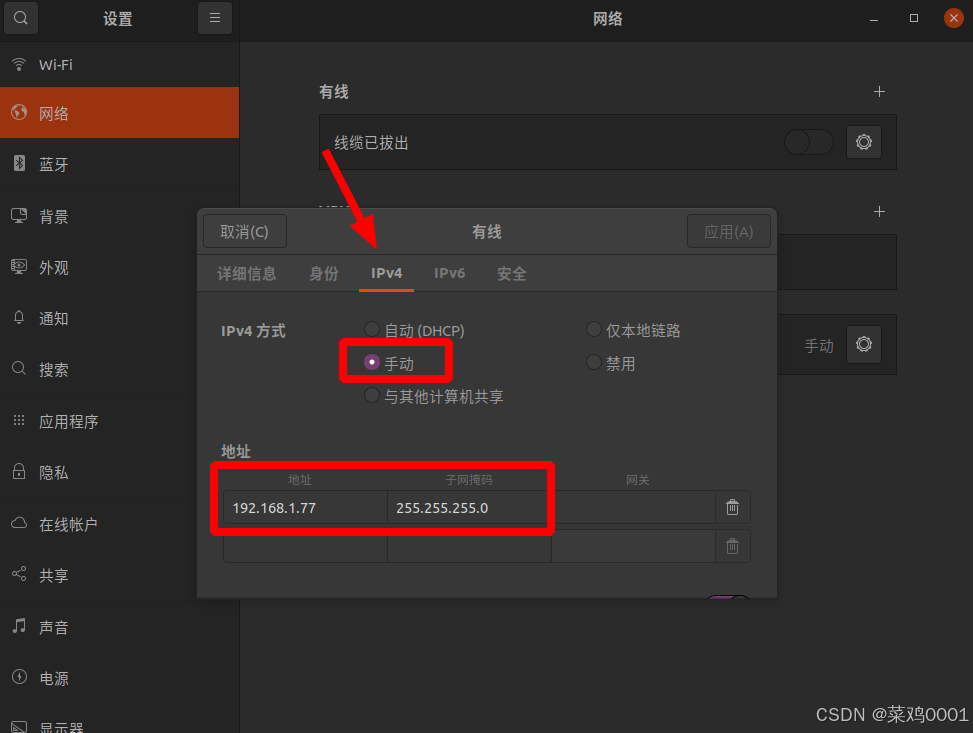
- 按照下图指示设置
IPv4 -手动 -地址192.168.1.77-子网掩码255.255.255.0-应用
- 重启一下有线网络
setp3:
cd sensor_ws
source devel/setup.bash
roslaunch velodyne_pointcloud VLP16_points.launch
rostopic echo velodyne_points (应该是这个名字,可以list确认一下)
话题有数据则成功。
至此,Velodyne雷达、阿路比imu和scout_mini的驱动都安装好啦!!!Good Lucky

















 4625
4625

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









