







 本文详细分析了Pixhawk的源代码姿态解算算法,结合北航可靠飞行控制研究组的成果,探讨了无人机飞行的气动模型与分析,以及软件版本、实验平台的配置。文章通过源代码解析了姿态解算的进程入口、数据订阅、滤波算法和误差处理,展示了如何通过四元数和欧拉角进行姿态估计和更新。
本文详细分析了Pixhawk的源代码姿态解算算法,结合北航可靠飞行控制研究组的成果,探讨了无人机飞行的气动模型与分析,以及软件版本、实验平台的配置。文章通过源代码解析了姿态解算的进程入口、数据订阅、滤波算法和误差处理,展示了如何通过四元数和欧拉角进行姿态估计和更新。
一、开篇
终于到ardupilot源代码的姿态解算了,有了前期关于mahony姿态解算算法的基础以后,理解源代码的姿态解算算法就快多了,所有的东西都在脑海中初步有了一个框架;首先要做什么,然后再做什么,再然后捏~~~反正容易上手的。
2016.04.04日晚,别人都在嗨,而我却在实验室苦逼的工作着,今晚最大的收获就是发现了“新大陆”-----“北航可靠飞行控制研究组”,其喜悦之情绝不亚于哥伦布发现新大陆。他们才是专业的啊,看看他们毕业生的去向,不是研究所就是出国深造,好吧,人家才是专业搞科研的,不食人间烟火,那么问题来了:DJI的员工都是在哪招来的呢?!哎,我是俗人一个,经济基础决定上层建筑,好好学习才能挣大钱。最近他们开设了一门课程《多旋翼飞行器设计与控制》,课程体系安排的非常好,现在更新到第四讲了(听北航一个博士说只有PPT没有视频,感谢Mallin的帮助,成功打入内部),PPT也足够了,相当上档次啊,课程到2016.06.30结束,正好可以把无人机的整个架构理解完,找工作去~~~
在下面的基础知识部分先分享一部分“北航”的研究成果,特别是气动方面的,以前一点概念都没有,只看着超跑的流线型非常炫酷,不知其原因,特此记录,大家共勉。
三、实验平台
Software Version:PX4Firmware
Hardware Version:pixhawk
IDE:eclipse Juno (Windows)
四、基础知识(均来自北航可靠飞行控制研究组)
1、无人机飞行的气动模型与分析
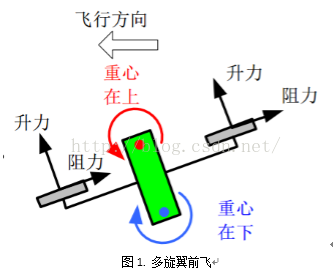
1)多旋翼前飞情形:在下图中,因为螺旋桨的柔性,诱导的来流会产生阻力。
如果多旋翼重心在桨盘平面下方,那么阻力形成的力矩会促使多旋翼俯仰角转向0度方向。
如果多旋翼重心在桨盘平面上方,那么阻力形成的力矩会促使多旋翼俯仰角朝发散方向发展,直至翻转。因此,当多旋翼前飞时,重心在桨盘平面的下方会使前飞运动稳定。
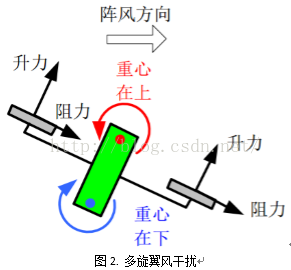
2)多旋翼风干扰情形:在下图中,当阵风吹来,因为螺旋桨的柔性,诱导的来流会在产生阻力。
如果多旋翼重心在下,那么阻力形成的力矩会促使多旋翼俯仰角朝发散的方向发展,直至翻转。
如果多旋翼重心在上,那么阻力形成的力矩会促使多旋翼俯仰超0度方向发展。因此,当多旋翼受到外界风干扰时,重心在桨盘平面的上方可以抑制扰动。
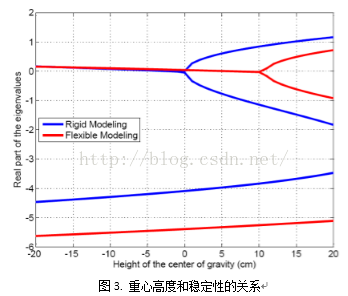
3)综上所述:无论重心在桨盘平面的上方或下方都不能使多旋翼稳定。因此需要通过反馈控制将多旋翼平衡。然而,如果重心在桨盘平面很靠上的位置,会使多旋翼某个运动模态很不稳定。因此,实际中建议将重心配置在飞行器桨盘周围,可以稍微靠下。这样控制器控制起来更容易些。
2、气动布局
对外形进行设计主要是为了降低飞行时的阻力。按其产生的原因不同可分为
(1)摩擦阻力
(2)压差阻力
(3)诱导阻力
(4)干扰阻力
要减少这些阻力,需要妥善考虑和安排各部件之间的相对位置关系,部件连接处尽量圆滑过渡,减少漩涡产生。
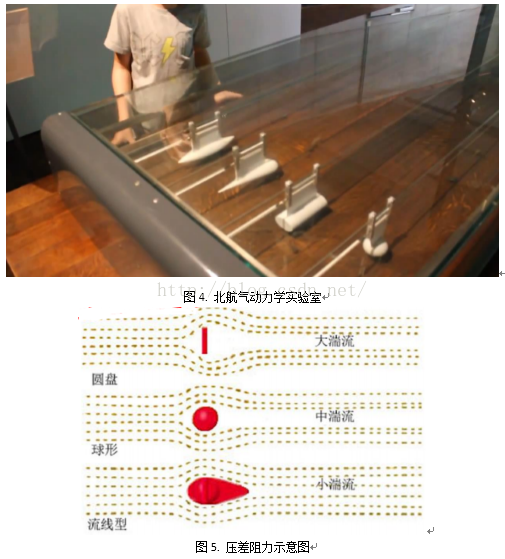
因此它与物体的迎风面积有很大关系,迎风面积越大,压差阻力也越大。物体的形状也对压差阻力影响很大。如上图所示的三个物体,圆盘的压差阻力最大,球体次之,而流线体的最小,就压差阻力而言可以是平板压差阻力的1/20。
设计建议:(法拉利、保驰捷等超跑的流线型车就是很好的榜样,宝马 Z4也可以,奔驰Smart就太low了,差点忘记特斯拉了)
(1)需要考虑多旋翼前飞时的倾角,减少最大迎风面积。
(2)并设计流线型机身。
(3)考虑和安排各部件之间的相对位置关系,部件连接处尽量圆滑过渡,飞机表面也要尽量光滑。
(4)通过CFD仿真(Computational Fluid Dynamics:计算流体动力学)计算阻力系数,不断优化。

昨天见到了零度的四旋翼,外形设计的就是好,可惜只靠外形还是干不过DJI的,加油吧,零度。
五、正文(源代码的姿态解算算法)
1、进程入口:voidAttitudeEstimatorQ::task_main()
1)订阅所需要的topics,注意sensor_combined,传感器数据都是靠它来的。
在订阅时使用ORB_ID(sensor_combined)获取ID号,该ID号代表了从topic_name到topicmetadata structure name之间的转换桥梁。在task_main()的初始部分使用uORB模型的orb_subscribe()函数获取在sensors.cpp中通过orb_advertise()函数广播的传感器信息(sensor_combined)。由此说明在使用之前需要通过orb_advertise()函数之后才能在需要其数据的地方使用orb_subscribe()获取。如果没有使用,订阅者可以订阅,但是接收不到有效数据。
关于uOBR模型的不再赘述,详细介绍参看:http://blog.csdn.net/freeape/article/details/46880637
和http://www.pixhawk.com/start?id=zh%2Fdev%2Fshared_object_communication&go
px4_poll(fds,1, 1000):配置阻塞时间,1ms读取一次sensor_combined的数据。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1827
1827

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









