







表面法线和曲率可以好的代表一个点的几何特征。然而它们算得很快,而且算法简单,但是它们不能捕获细节,它们只是点的近邻的几何特征的近似估计。作为一个直接的结论,大多数的场景往往会包括很多有着相似特征的点,这会减少它们所带来的消息量。
这次我们将引进一个叫做PFH(point feature histgrams)的3D特征描述器,同时还将显示出它的一些理论优势,并讨论它的一些实现细节。
PFH的目标是通过使用一个点周围的多维直方图的平均曲率来编码一个点的k个最近邻的几何属性。这个高维空间提供了一些有用的特征代表,同时关于6位位姿不变的,同时和可以很好的应对不同的采样密度和近邻的噪声水平。
一个点特征直方图是与点的最近邻和法线有关的,简单的说,它企图通过考虑各个预测法线方向之间的影响来捕获最好的采样平面。最终的高维空间因此和每个点的表面法线的方向有关。
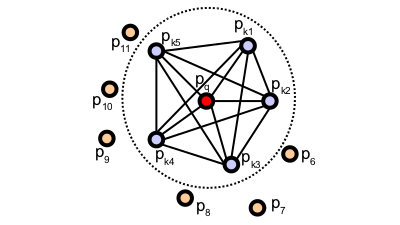
下面的图展示了一个PFH在计算Pq这个点时候的影响区域图,Pq这个点用红色标记并放在半径为r的圆圈的中央,然后它的所有近邻(离点的距离小于半径r)都通过一个网格来间接的相邻着。下面的PFH描述器作为了一个直方图计算了所有匹配的点之间的关系,有一个O(k方)的复杂度。
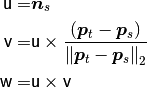
计算pi和pj之间的绝对差,和与它们相关联的法线ns和nj,我们定义了一个固定的坐标系在某个点上。
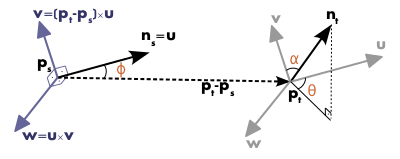
我发现官网里面的上面的式子与下面的图对应不上,以图为标准,式子里面的那个v向量的方向和大小与图里面的都对不上。使用上面的uvw的坐标系,ns法线和ni法线的差可以化解为下面的3个角度的差异(因为他们的模都是一样的):
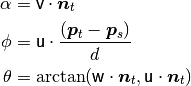
d是两点距离的平方,
使用PFH得到一个点的四要素可以用下面的方法:
computePairFeatures (const Eigen::Vector4f &p1, const Eigen::Vector4f &n1, const Eigen::Vector4f &p2, const Eigen::Vector4f &n2, float &f1, float &f2, float &f3, float
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1212
1212

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









