







前几篇博客讲述了节点的订阅与发布、消息msg和服务srv的使用。这些示例的使用比较简单,但在实际工程应用中,一个功能包可能包含很多个节点,一个功能的实现往往需要运行多个节点,此时若使用rosrun命令运行节点无疑非常麻烦且不切合实际。在ROS中可以使用launch来解决这个问题,通过launch文件一次性启动多个节点。
以博主的博客ROS节点订阅与发布为例,来演示ROS中的启动文件编辑与运行。
1. 编辑launch启动文件
cd ~/catkin_ws
source devel/setup.bash
roscd ROS_Test1
mkdir launch
cd launch
vim ROS_Test1.launch
编辑内容如下所示:
<?xml version="1.0"?>
<launch>
<node name = "node_a" pkg = "ROS_Test1" type = "Test1_node_a"/>
<node name = "node_b" pkg = "ROS_Test1" type = "Test1_node_b"/>
</launch>2. 运行启动节点
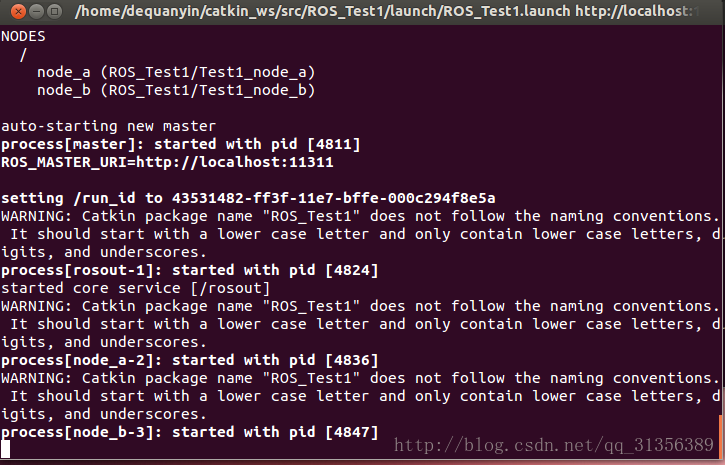
roslaunch ROS_Test1 ROS_Test1.launch
运行结果如下所示:
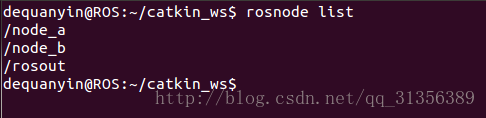
执行rosnode list
使用rosluanch运行节点时,ROS_INFO输出的信息不显示,此时运行命令行:
rqt_console
结果如下所示:
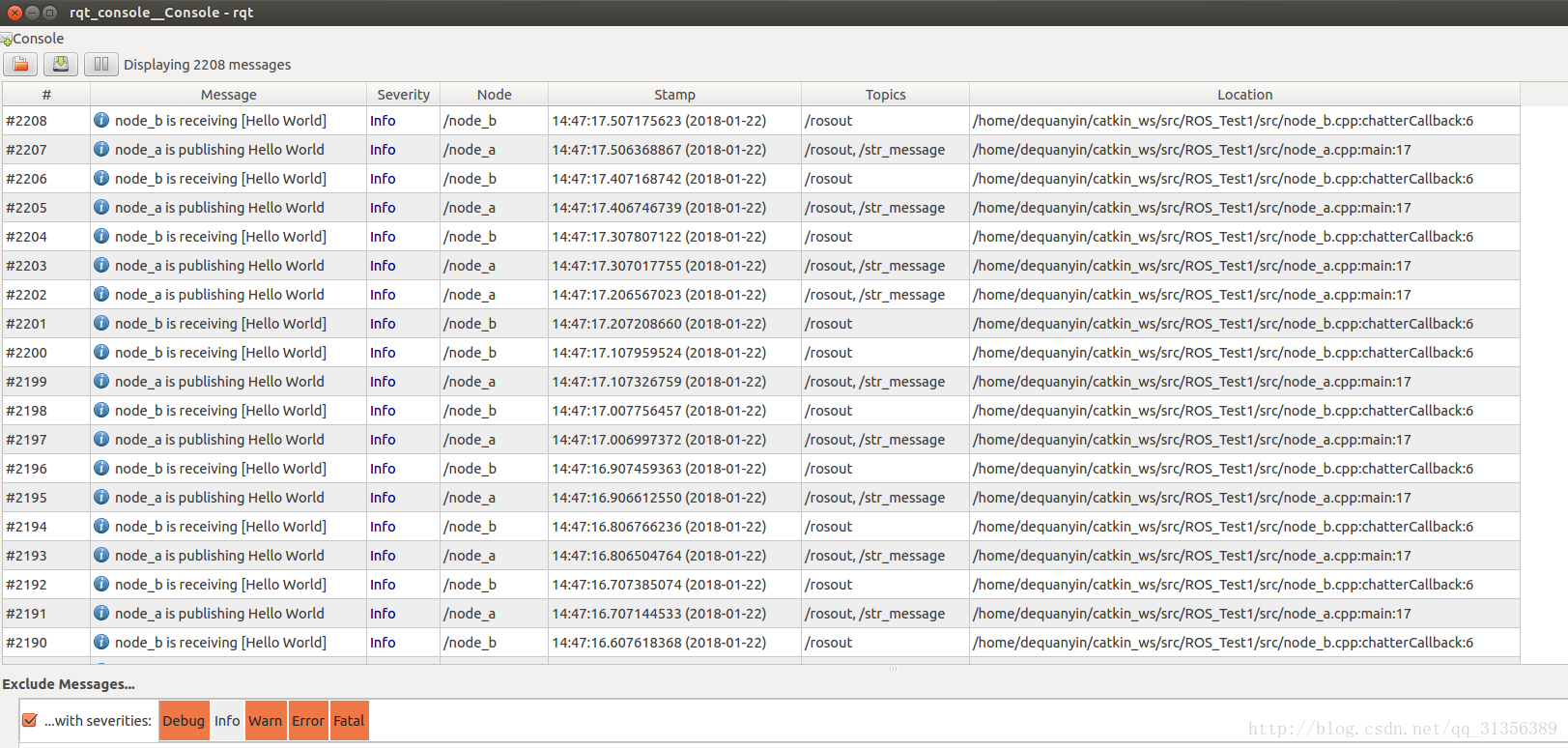
可以看出节点运行与消息输出情况。
3. 补充
执行roslaunch命令行时,会自动运行roscore命令,因此使用启动文件运行节点时不需要新开终端运行roscore。

















 330
330

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









