







vins是今年刚开源的vio系统,跑了数据集效果挺好的,所以看了paper和代码。
视频地址:https://www.youtube.com/watch?v=I4txdvGhT6I
github:https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
系统框图如下
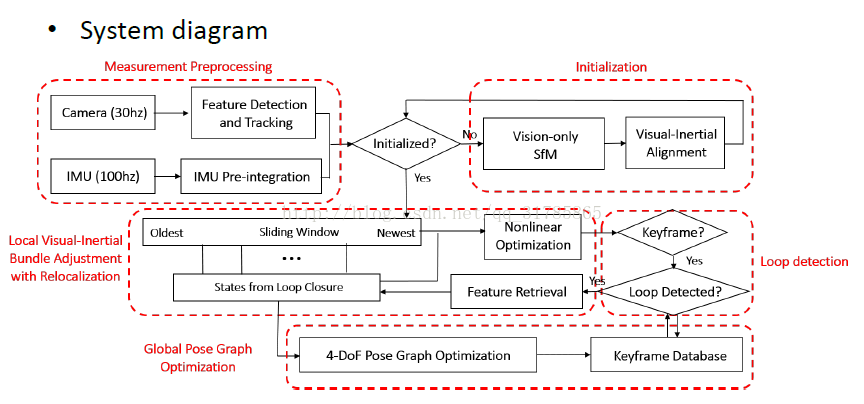
主要分为:
1、测量数据预处理:IMU预积分、Harris特征提取和跟踪
2、外参标定和初始:手眼标定法获得外参旋转量、纯视觉SFM、Visual-Inertial调整
3、里程计:IMU误差+重投影误差+先验误差的多目标非线性优化调整、滑动窗口调整,关键帧获取、重定位
4、闭环:fast特征提取+BRIEF描述子、利用BoW的闭环检测,基础矩阵+RANSAC的位姿估计、4自由度Psoe-Graph优化
有不对的地方欢迎指正!
EMAIL:wangxf92_hit@163.com
参考文献:Technical Report: VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator















 610
610

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









