







目录
3.5周跳的探测与修复
1.周跳的概念和特性
载波观测值由两部分组成:一部分是累计得到的整数变化部分,另一部分是瞬间测得的小数部分。整数变化部分是通过对卫星的不间断跟踪并积分得到。但是,如果由于某种原因,接收机中断了对卫星信号的跟踪,在此期间,积分量为0,在恢复信号跟踪后,其所获得的整数与正确整数之间存在着一个偏差,这个偏差被称为周跳,即计数器中断所丢失的整周数。
周跳有三个特性:
第一个特性是整数性,即周跳值是一个整数。
第二个特性是继承性。如图所示,由于整周数是累计所得,因此,当发生n周周跳时,不但本历元观测值少了n周,自该历元起以后各历元观测值都会少n周。
第三个特性是不确定性。周跳可能只在两历元间隔期内产生,也可能跨历元产生,可能只在一个频率上产生,也能在多个频率上同时产生。
2.周跳产生的原因
第一,由于障碍物的短时间遮挡。如卫星信号被树木、电线杆、建筑物或山丘等障碍物遮挡,无法到达接收机天线。因此,应用GNSS定位时,应尽可能地回避影响卫星信号传播的环境。
第二,接收机的快速运动。接收机在锁定卫星信号时,需要预测接收机与卫星之间的多普勒频移量,接收机的运动将使得该过程的难度增加,甚至导致信号失锁。因此,在**高动态情况下,**要特别小心周跳的问题。
第三,接收机接收到的卫星信号信噪比比较低。当卫星高度角较低时,信号将在大气层中传播更远的距离,信号损耗加大,从而使到达接收机的卫星信号信噪比下降。另外,电离层的活动、其他射频信号的干扰以及多路径效应,也将导致信号的信噪比下降。当到达接收机的卫星信号信噪比过低时,将使得接收机无法正常锁定信号,从而引起周跳。因此,对于低高度角卫星、以及在电离层活跃时期,特别容易产生周跳。
第四,接收机硬件的故障或者软件的不完善。因此,知名品牌的接收机在抗周跳方面具有优势。
第五,卫星的原因。如果卫星的振荡器不能正常工作,导致所产生的信号不正确,也容易出现周跳现象。
3.周跳探测
(1)载波相位观测值在正常状态下应是连续变化的。
我们知道,卫星运动是连续变化的,接收机的运动也是连续变化的或者是静止的,因此,载波观测值也应该是连续变化的。如果发生周跳,则会破坏这种连续变化的规律。
对这条约束信息的具体实现上,有多种数学方法。其中高次差法能非常直观地体现这种连续性。当4次差分之后,差值呈现出随机误差特性,这种随机特性与接收机钟差的不稳定性相符。说明此段观测值没有周跳。
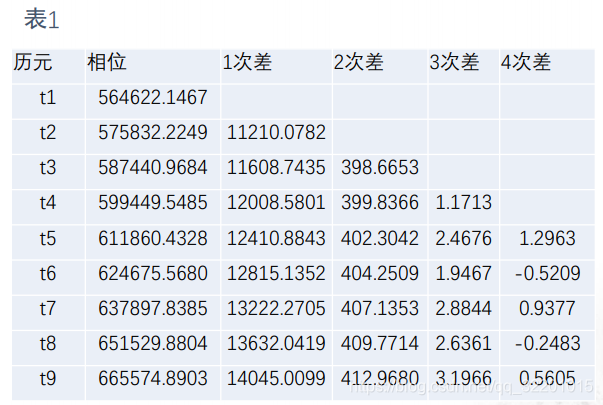
如果加入了周跳,,凡是与该观测值有关的差都发生了异常变化,而且随着求差阶次越高,差异现象越明显。

高次差法虽然直观,但不适合于计算机运算。于是,提出了适应于
计算机运算的多项式拟合法。
如式(3)所示,一般来说,多项式阶数n取4或5,a0至an为待求系数,t0为探测窗口首历元,ti为其后各历元。 先利用前m 个无周跳的载波相位观测值,参照式(3)建立误差方程,写成如式(4)所示的矩阵形式。
φ
k
p
(
t
i
)
=
a
0
+
a
1
(
t
i
−
t
0
)
+
a
2
(
t
i
−
t
0
)
2
+
…
a
n
(
t
i
−
t
0
)
n
(
3
)
\varphi_k^p(t_i)=a_0+a_1(t_i-t_0)+a_2(t_i-t_0)^2+\dots a_n(t_i-t_0)^n(3)
φkp(ti)=a0+a1(ti−t0)+a2(ti−t0)2+…an(ti−t0)n(3)
V
=
A
X
−
L
(
4
)
V=AX-L(4)
V=AX−L(4)
式中:
[
1
t
1
−
t
0
⋯
(
t
1
−
t
0
)
n
1
t
2
−
t
0
⋯
(
t
2
−
t
0
)
n
⋯
⋯
⋯
⋯
1
t
m
−
t
0
⋯
(
t
m
−
t
0
)
n
]
\begin{bmatrix} 1 & t_1-t_0&\cdots&(t_1-t_0)^n \\ 1 & t_2-t_0&\cdots&(t_2-t_0)^n \\ \cdots & \cdots&\cdots&\cdots \\ 1 & t_m-t_0&\cdots&(t_m-t_0)^n \\ \end{bmatrix}
⎣⎢⎢⎡11⋯1t1−t0t2−t0⋯tm−t0⋯⋯⋯⋯(t1−t0)n(t2−t0)n⋯(tm−t0)n⎦⎥⎥⎤
X
=
[
a
^
0
a
^
1
⋮
a
^
n
]
L
=
[
φ
k
p
(
t
1
)
φ
k
p
(
t
2
)
⋮
φ
k
p
(
t
m
)
]
X=\begin{bmatrix} \hat a_0\\ \hat a _1 \\ \vdots \\ \hat a_n \\ \end{bmatrix} \quad L=\begin{bmatrix} \varphi_k^p(t_1)\\ \varphi_k^p(t_2)\\ \vdots \\\varphi_k^p(t_m)\\ \end{bmatrix} \quad
X=⎣⎢⎢⎢⎡a^0a^1⋮a^n⎦⎥⎥⎥⎤L=⎣⎢⎢⎢⎡φkp(t1)φkp(t2)⋮φkp(tm)⎦⎥⎥⎥⎤
根据最小二乘原理,利用式(5)解得各系数最优估值。 再根据残差,利用式(6)计算单位权中误差。
利用建立后的拟合公式式(7)对下一个历元的载波相位观测值进行预测。如果预测值与实际观测值之差大于三倍单位权中误差,则认为有周跳,否则认为没有周跳。
实际工作中,逐历元移动探测窗口,直至最后一个历元。但是,由于接收机时钟的不稳定,高次差法和多项式法仅适合探测大周跳。
X
=
(
A
T
A
)
−
1
A
T
L
(
5
)
σ
=
V
T
V
m
−
(
n
+
1
)
(
6
)
φ
k
′
p
(
t
i
+
1
)
=
a
^
0
+
a
^
1
(
t
i
+
1
−
t
0
)
+
a
^
2
(
t
i
+
1
−
t
0
)
2
+
…
a
^
n
(
t
i
+
1
−
t
0
)
n
(
7
)
X=(A^TA)^{-1}A^TL(5)\\ \sigma=\sqrt\frac {V^TV}{m-(n+1)}(6)\\ \varphi_k^{'p}(t_{i+1})=\hat a_0+\hat a_1(t_{i+1}-t_0)+\hat a_2(t_{i+1}-t_0)^2+\dots \hat a_n(t_{i+1}-t_0)^n(7)
X=(ATA)−1ATL(5)σ=m−(n+1)VTV(6)φk′p(ti+1)=a^0+a^1(ti+1−t0)+a^2(ti+1−t0)2+…a^n(ti+1−t0)n(7)
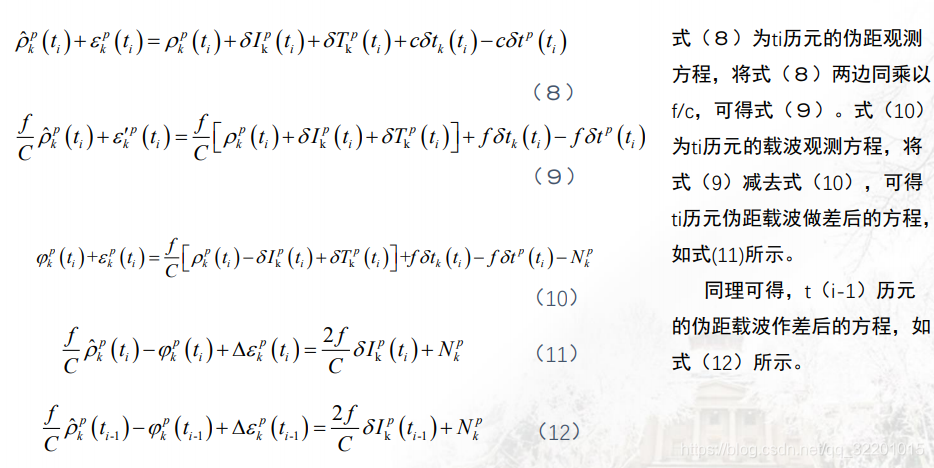
(2)伪距的约束。
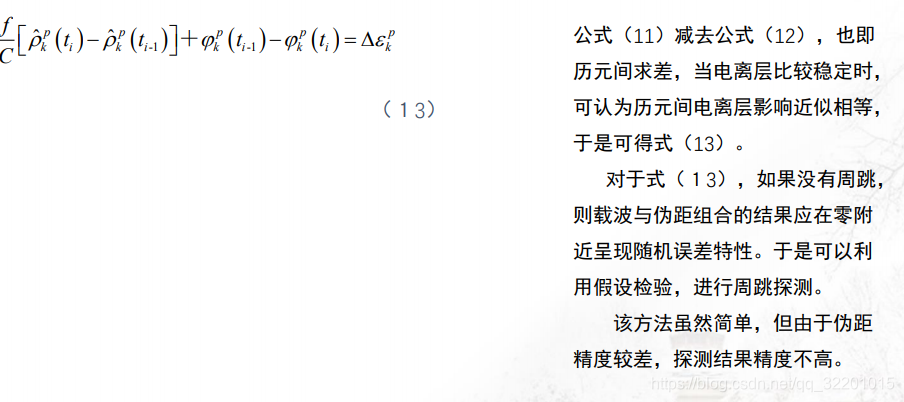
伪距和载波观测值之间,具有严密的数学关系,且伪距不存在周跳问题,因此伪距可对载波周跳的探测起到约束作用。
下面介绍一个伪距约束的经典方法——相位减伪距法。相位减伪距法的核心思想是伪距的历元间变化量应该等于载波的历元间变化量,因此可通过对历元间伪距差与载波观测值差的对比,来发现周跳。
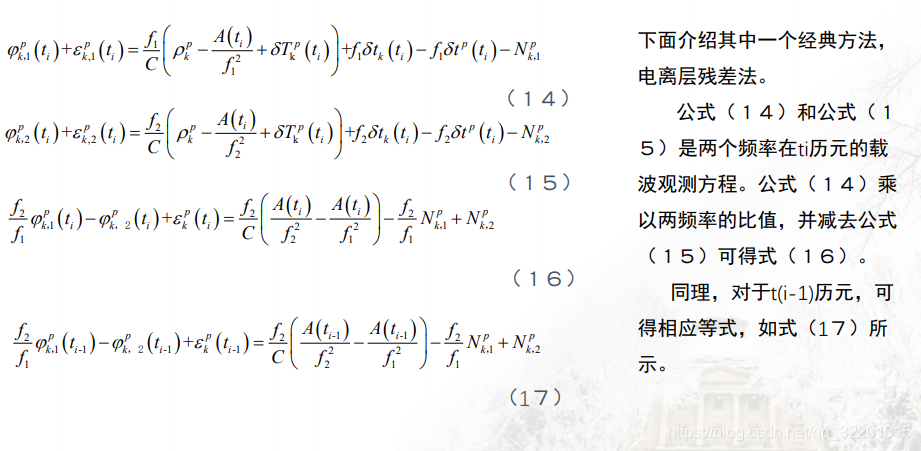
(3)电离层延迟与频率严相关这个条件。
第三个信息是,电离层延迟与频率严相关这个条件。通过这个条件使得几个频率上的载波观测值形成互相约束的效果。
周跳修复
前面只是针对三种约束信息,给出相应的经典探测方法。在实际工作中,通常是利用多种方法组合,实现周跳的准确探测。
周跳探测完成后,还需要对发生周跳的载波观测值进行修复。若周跳探测的精度优于0.5周,则需利用周跳的实数估值得到周跳整数解,并在此后各历元的载波观测值上加上该周跳值。如果周跳探测的精度不高,通常采用重置模糊度的方法。
3.6整周模糊度的固定
由于载波观测值精度远远高于伪距观测值精度,因此载波是GNSS精密定位中必不可少的观测量。 但是,载波观测值的相应距离,需加上一个未知整数倍波长的距离才等于星地距离。这个未知整数被称作为模糊度。
1 整周模糊度固定的流程概述
各种利用载波观测值进行定位的方程,都可统一表达成式(1)形式。
{
ε
=
A
a
+
B
b
−
L
ε
∼
N
(
0
,
D
L
L
)
(
1
)
\left\{ \begin{array}{lr} \varepsilon =Aa+Bb-L\\ \varepsilon \thicksim N(0,D_{LL}) \end{array} (1) \right.
{ε=Aa+Bb−Lε∼N(0,DLL)(1)
式中,小a为模糊度,小b为基线向量或位置等其他未知数,大A和大B为系数矩阵,并假设观测值的随机误差服从正态分布。
首先,利用最小二乘法,通过式(2)可得各未知数在实数域的最优估值,通过式(3)可得相应的协方差矩阵。由于模糊度的解是在实数域得到的,因此,这样的解被称作为实数解;又由于模糊度的实数解含有随机误差,因此也常被称作为浮点解。
(
a
^
b
^
)
=
[
(
A
T
B
T
)
D
L
L
−
1
(
A
B
)
]
−
1
(
A
T
B
T
)
D
L
L
−
1
L
(
2
)
\begin{gathered} \begin{pmatrix} \hat a \\ \hat b \end{pmatrix}= \quad \begin{bmatrix} \begin{pmatrix} A^T \\ B^T \end{pmatrix} D_{LL}^{-1}(A \quad B) \end{bmatrix}^{-1} \begin{pmatrix} A^T \\ B^T \end{pmatrix} D_{LL}^{-1}L \end{gathered}(2)
(a^b^)=[(ATBT)DLL−1(AB)]−1(ATBT)DLL−1L(2)
(
D
a
^
a
^
D
a
^
b
^
D
b
^
a
^
D
b
^
b
^
)
=
[
(
A
T
B
T
)
D
L
L
−
1
(
A
B
)
]
−
1
(
3
)
\begin{gathered} \begin{pmatrix} D_{\hat a \hat a} & D_{\hat a \hat b} \\ D_{\hat b \hat a} & D_{\hat b \hat b} \end{pmatrix}= \quad \begin{bmatrix} \begin{pmatrix} A^T \\ B^T \end{pmatrix} D_{LL}^{-1}(A \quad B) \end{bmatrix}^{-1} \end{gathered}(3)
(Da^a^Db^a^Da^b^Db^b^)=[(ATBT)DLL−1(AB)]−1(3)
实数解解算的过程并没有顾及到模糊度的整数特性。为了得到更高精度的定位解,还需利用模糊度的整数特性,在实数解的基础上进一步得到各未知数的整数解。当前,由实数解求取整数解的过程,通常包含如下三个步骤:
第一步,基于模糊度的实数解及方差矩阵,寻找一个整数向量作为模糊度的候选整数解;
第二步,通过一定的检验标准对候选整数解进行确认检验;
第三步,如果候选整数解通过确认检验,则基于条件分布,利用模糊度整数解求得其他参数的整数解;否则维持实数解。
2.模糊度候选值的搜索
寻找
我们首先介绍模糊度固定的第一步,模糊度整数解候选值的寻找。
寻找方法经历过直接取整法、逐维引导法、整数最小二乘法等三个发展阶段。由于前两种方法对信息利用不够充分,所得结果不能保证是最优的整数候选值,因此,目前已基本被淘汰。当前,模糊度整数解候选值的寻普遍采用的方法是整数最小二乘法。
所谓整数最小二乘法,是其解满足式(4)所示的一组整数向量。式(4)的含义是有一个与模糊度同维的整数向量,其与模糊度实数解之差的二次型最小,则该整数向量即为整数最小二乘解。
a
˘
I
L
S
=
a
r
g
m
i
n
∥
a
^
−
a
˘
∥
D
a
^
a
^
2
a
˘
∈
Z
n
(
4
)
\breve a_{ILS}=argmin\Vert \hat a-\breve a\Vert _{D_{\hat a \hat a}}^2 \quad \breve a \in Z^n \quad(4)
a˘ILS=argmin∥a^−a˘∥Da^a^2a˘∈Zn(4)
式(4)只是一个定义公式。整数最小二乘解的获得,一般需要通过在给定空间中进行搜索得到。该给定空间一般由式(5)定义得到。式(5)右边的阈值由给定的显著性水平阿耳法和模糊度维数n通过卡方分布确定。
∥
a
^
−
a
˘
∥
D
a
^
a
^
2
≤
λ
α
2
(
n
)
(
5
)
\Vert \hat a-\breve a\Vert _{D_{\hat a \hat a}}^2 \le \lambda_\alpha ^2(n) \quad (5)
∥a^−a˘∥Da^a^2≤λα2(n)(5)
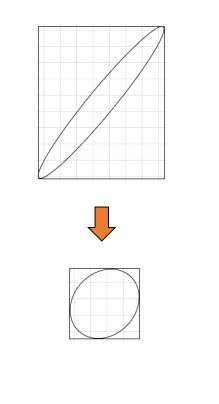
下面以二维情况为例,说明其具体搜索策略。如图,由式(5)定义了一个椭圆搜索空间,但实际搜索时是在包含椭圆的长方体内进行的,使得实际搜索空间远远大于椭圆空间。为了减少搜索工作量,于是引入了LAMBDA方法。 LAMBDA方法的核心思想是通过一个整数矩阵对模糊度实数解进行变换,使得模糊度实数解降相关,同时保证变换前后模糊度的整数特性不变。也就是说,变换前后两空间的整数向量是一一对应的,但变换后的方差矩阵非对角线元素很小,使得搜索椭圆的轴与坐标系近似平行。
通过LAMBDA变换后,椭圆外的搜索空间大幅度降低,因此极大地提高了搜索效率。
LAMBDA方法在模糊度整数解候选值的搜索方面应用极为广泛。下面介绍下其具体计算过程。首先,根据模糊度实数解的方差矩阵得到一个同维的整数方矩阵z,要求矩阵z及其逆矩阵中所有元素都是整数,且矩阵z的行列式等于1或-1,矩阵Z应使变换后的方差矩阵非对角线元素尽可能的小。矩阵Z的具体确定方法有多种,大家可以参考相关文献;接着,利用矩阵z通过式(6)和式(7)对模糊度实数解及其方差矩阵进行变换;
a
^
Z
=
Z
T
a
^
(
6
)
D
a
^
a
^
,
Z
=
Z
T
D
a
^
a
^
Z
\hat a _Z= Z^T \hat a (6) D_{\hat a \hat a,Z}=Z^TD_{\hat a \hat a}Z
a^Z=ZTa^(6)Da^a^,Z=ZTDa^a^Z
然后,基于变换后的模糊度实数解及其方差矩阵,利用式(5)建立搜索空间,进行整数向量搜索。在LAMBDA方法中,确定搜索空间大小的方法有两种:
一种是收缩法,其思路是先给一特别大的搜索空间,若有一组整数向量,根据式(8)定义的其残差二次型开方值小于当前搜索空间半径,则将该值作为新的搜索空间半径,进而实现搜索空间不断收缩。
第二种是枚举法,根据超椭球体积计算公式,确定含有至少有两个整数向量的超椭球半径,并以此超椭球半径得到一个固定搜索空间。
在搜索过程中,还将所得到的整数向量其残差二次型,从小到大进行排序。
Ω
i
=
∥
a
^
Z
−
a
˘
Z
,
i
∥
D
a
^
a
^
,
Z
2
a
˘
Z
,
i
∈
Z
n
(
8
)
\Omega_i=\sqrt{\Vert \hat a_{Z}-\breve a_{Z,i}\Vert _{D_{\hat a \hat a},Z}^2}\quad \breve a_{Z,i} \in Z^n \quad(8)
Ωi=∥a^Z−a˘Z,i∥Da^a^,Z2a˘Z,i∈Zn(8)
最后,利用式(9),将搜索得到的整数向量变回到原来的域,排第一的整数向量即为模糊度整数解候选值。
a
˘
i
=
(
Z
T
)
−
1
a
˘
Z
,
i
(
9
)
\breve a_{i}=(Z^T)^{-1}\breve a_{Z,i}\quad(9)
a˘i=(ZT)−1a˘Z,i(9)
确认检验
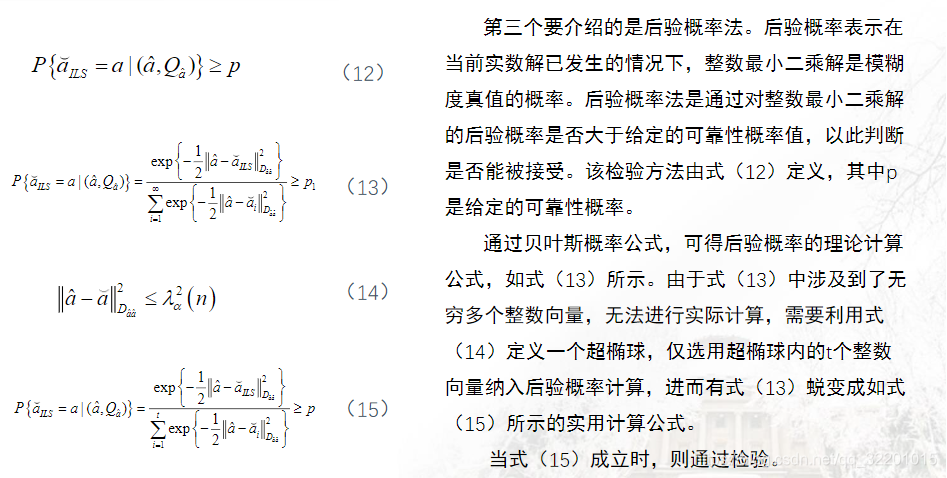
我们下面介绍模糊度固定的第二步,对模糊度整数解候选值进行确认检验。确认检验的方法很多,这里介绍几种常见的方法。
第一个要介绍的是ratio 检验。式(10)即为Ratio检验公式,其判断残差二次型次最小和最小之比是否大于给定的阈值c1,如果Ratio值大于c1,则通过检验。需要说明的是,该检验方法及阈值c1都是来自于经验,c1一般取2至3间某个值。
R
a
t
i
o
=
∥
a
^
−
a
˘
I
L
S
′
∥
D
a
^
a
^
2
∥
a
^
−
a
˘
I
L
S
∥
D
a
^
a
^
2
≥
c
1
(
10
)
Ratio=\frac{\Vert \hat a -\breve a_{ILS}' \Vert ^2_{D_{\hat a \hat a}}}{\Vert \hat a -\breve a_{ILS} \Vert ^2_{D_{\hat a \hat a}}} \ge c_1\quad(10)
Ratio=∥a^−a˘ILS∥Da^a^2∥a^−a˘ILS′∥Da^a^2≥c1(10)
第二个要介绍的是差值检验。式(11)即为差值检验公式,其判断残差二次型次最小和最小之差是否大于给定的阈值c2,如果D值大于c2,则通过检验。需要说明的是,该检验方法及阈值c2也是来自于经验,c2一般取4至5间某个值。
D
=
∥
a
^
−
a
˘
I
L
S
′
∥
D
a
^
a
^
2
−
∥
a
^
−
a
˘
I
L
S
∥
D
a
^
a
^
2
≥
c
2
(
11
)
D=\Vert \hat a -\breve a_{ILS}' \Vert ^2_{D_{\hat a \hat a}}-\Vert \hat a -\breve a_{ILS} \Vert ^2_{D_{\hat a \hat a}} \ge c_2\quad(11)
D=∥a^−a˘ILS′∥Da^a^2−∥a^−a˘ILS∥Da^a^2≥c2(11)
式中,
a
˘
I
L
S
\breve a_{ILS}
a˘ILS是使残差二次型最小的整数向量;
a
˘
I
L
S
′
\breve a_{ILS}'
a˘ILS′是使残差二次型次最小的整数向量。
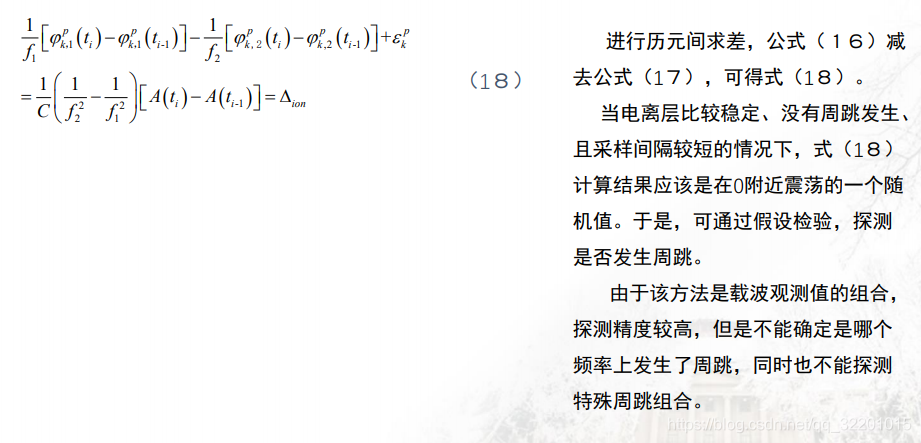
3)确认其他整数解
我们下面介绍模糊度固定的第三步,利用模糊度整数解,计算定位未知数的整数解。如果模糊度整数最小二乘解没有通过确认检验,则维持实数解;如果通过了确认检验,则需要利用条件分布公式,进一步得到更高精度的定位整数解。具体计算如下,利用式(16)计算得到定位整数解的最优估值,利用式(17)计算得到相应的方差矩阵。至此,就实现了对模糊度整数特性的利用,得到了高精度的定位整数解结果。
b
˘
=
b
^
−
D
b
^
a
^
D
a
^
a
^
−
1
(
a
^
−
a
˘
I
L
S
)
(
16
)
D
b
˘
b
˘
=
D
b
^
b
^
−
D
b
^
a
^
D
a
^
a
^
−
1
D
a
^
b
^
(
17
)
\breve b=\hat b-D_{\hat b \hat a}D_{\hat a \hat a}^{-1}(\hat a-\breve a_{ILS})\quad (16)\\ D_{\breve b \breve b}=D_{\hat b \hat b}-D_{\hat b \hat a}D_{\hat a \hat a}^{-1}D_{\hat a \hat b}\quad (17)
b˘=b^−Db^a^Da^a^−1(a^−a˘ILS)(16)Db˘b˘=Db^b^−Db^a^Da^a^−1Da^b^(17)
3.7 精密单点定位技术
01.概念
精密单点定位方法是利用GNSS卫星精密星历及精密卫星钟差,以单台双频GNSS接收机采集的载波相位数据作为主要观测值进行解算,实现精密单点定位。
精密单点定位的解算流程主要包括数据预处理、数学模型选择、参数估计等阶段。在解算流程中的关键问题是如何实现对各系统误差的精确处理。
02.系统误差及处理方法

如图所示,系统误差总的来说可以分为三类。
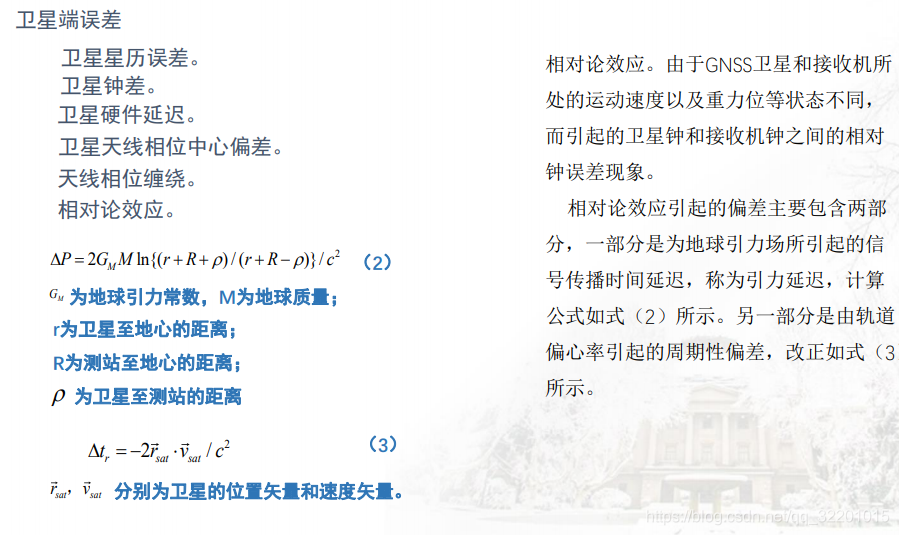
第一类, 卫星端的误差。主要包括卫星星历误差、 卫星钟差、卫星天线相位中心偏差、天线相位缠绕、相对论效应、卫星端硬件延迟等;
第二类是传播路径上的误差。主要包括对流层延迟、电离层延迟、多路径效应等。
第三类是接收机端的误差。主要包括接收机钟差、固体潮误差、接收机端硬件延迟、地球自转改正等;
卫星端的误差
卫星星历误差。卫星星历误差是指由卫星星历计算出的卫星位置和实际位置之间的偏差。想获得厘米级的定位精度,则卫星星历误差至少也在厘米级。根据导航文件计算出的卫星轨道和时钟精度远远不能满足厘米级定位的需要。在精密单点定位中,卫星坐标一般是通过对IGS发布的星历文件进行插值来获取,内插时间是信号接收时间减去信号传播时间。
卫星钟差。卫星钟时间与标准时间之间的差值,称为卫星钟差。要想获得厘米级定位精度,钟差精度必须小于0.3纳秒。在精密单点定位解算中,通过IGS等机构发布的卫星钟差改正数插值得到卫星信号发射时刻的钟差。
卫星硬件延迟。卫星信号从产生到发射这段时间在卫星内部传输导致的延迟称为卫星硬件延迟。卫星端硬件延迟中的码延迟可以通过IGS发布的偏差文件改正;相位延迟需要用一些研发机构发布的相位偏差产品来改正,或自行估计并改正。
卫星天线相位中心偏差。 卫星天线几何中心和相位中心的偏差称为卫星天线相位偏差。卫星天线相位中心偏差通过IGS发布的天线文件来改正,可以直接改正卫星坐标,也可以换算为等效距离施加到观测值上。
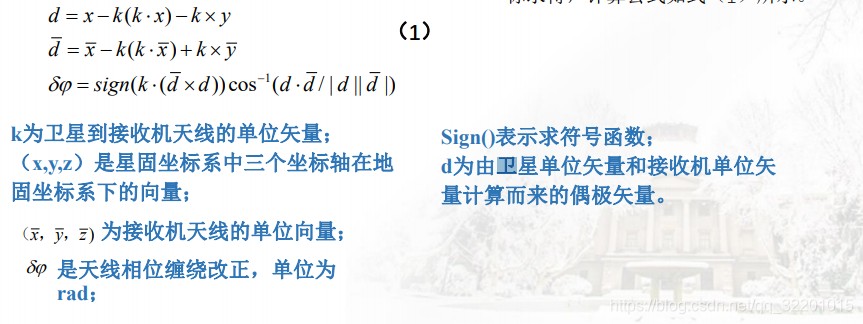
天线相位缠绕。 卫星和接收机天线的旋转会使得载波相位观测产生变化,这种变化最大为一周,称为天线相位缠绕。该值可利用卫星、太阳、地面点近似坐标求得,计算公式如式(1)所示。
传播路径上的误差
电离层延迟误差。 当卫星信号穿过电离层时,其传播路径会发生弯曲,路径的变化程度与电离层的电子密度和信号频率有关。对于双频接收机来说,一般采用电离层延迟一阶模型对电子总量进行参数估计,或采用线性组合实现消元。
对流层延迟误差。卫星信号穿过大气对流层产生的信号延迟称为对流层延迟。对流层延迟一般可分为干延迟和湿延迟两部分。干延迟通过模型改正即可得到较准确的延迟量,而对流层湿延迟模型的精度难以满足厘米级单点定位需要,故精密单点定位中通常是借助投影函数,去估计天顶对流层湿延迟参数。
多路径效应。接收机天线直接接收到的卫星信号,受到附近反射体反射的卫星信号干扰,从而使观测值偏离真值,这种偏差称之为多路径效应。在精密单点定位中,一般是通过设置适当的截止高度角来减弱多路径效应的影响。
接收机端的误差
接收机钟差,GNSS接收机时钟的精度和稳定性要远差于卫星时钟。在精密单点定位数据处理中,接收机钟差一般作为参数进行估计。
接收机硬件延迟。卫星信号到达接收机天线后,需经过一段传输过程到达观测值鉴别器,这个延迟被称作接收机硬件延迟。接收机硬件延迟的绝大部分可被接收机钟差和电离层延迟项吸收。
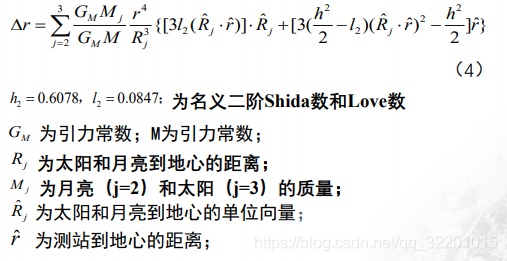
固体潮改正。地球在绕太阳运动过程中,受到太阳、月球以及其它摄动天体的影响,会使得地球表面产生周期性的变化,这种现象被称为固体潮。固体潮会使得测站在地固坐标系中发生周期变化。
为了得到一个在地固坐标系中的确定坐标,在精密单点定位解算中,一般需利用式(4)计算出XYZ各方向位移分量,然后换算为等效距离对观测值进行改正。
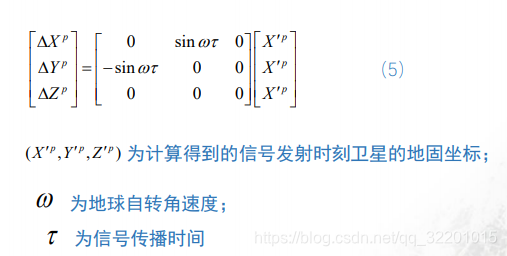
地球自转改正。由于地固坐标系随地球旋转,算得的发射时刻的卫星在地固坐标系下的坐标需要统一到接收时刻的地固坐标系,需对各卫星的地固坐标用式(5)计算相应的坐标改正量。
02数学模型的选择
下面介绍精密单点定位的数学模型选择。
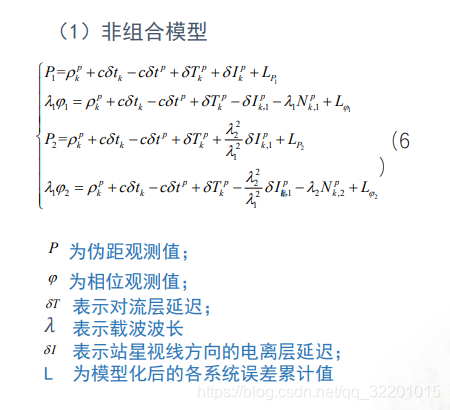
首先需要确定函数模型。其基本模型是非组合模型,如式(6)所示。在模型中将电离层延迟、天顶对流层延迟、接收机钟差、模糊度、测站坐标等参数同时进行参数估计。
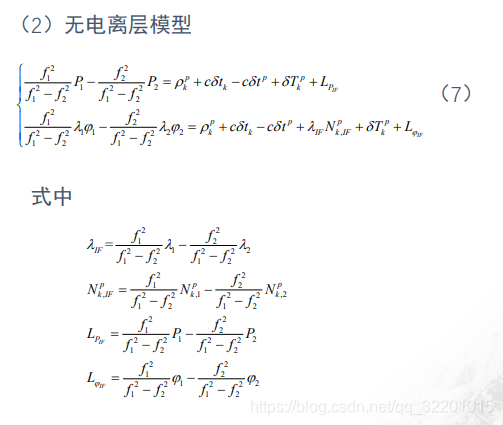
当然,还可以采用对原始观测方程进行组合,得到无电离层模型,如式(7)所示;
确定函数模型的同时,还需要确定随机模型。随机模型通常有三种类型
一是等权随机模型。等权随机模型认为同类观测值具有相同的精度。
二是高度角模型。高度角随机模型是以卫星高度角为变量的函数,最常用的为正弦函数模型,如式(9)所示。
第三是信噪比模型。信噪比是GNSS接收机在观测过程中的副产品,一定程度上反映了观测值的数据质量。
信噪比计算观测值方差的模型如式(10)所示。

精密单点定位的函数模型和随机模型确定后,即可以进行参数解算。解算方法有最小二乘法和卡尔曼滤波法两种。利用最小二乘法进行估计时,对模糊度等参数还需使用到序贯的方法。
使用卡尔曼滤波方法时,由于引入一些参数的状态方程,理论上会有助于解算精度的提高,但是如果状态方程与实际情况出入较大,也往往容易造成滤波发散,进而降低定位的准确性。
3.8伪距相位平滑及伪距定位差分
我们在前面介绍过伪距单点定位方法,由于其只需一个历元即可实现定位,所以在很多领域得到了广泛应用。但是,由于伪距测量的随机误差较大,以及定位解算中系统误差的影响,使得伪距单点定位精度只能达到米级,难以满足一些精度要求较高领域的定位需求。
于是需要从削弱伪距观测值的随机误差影响和观测方程中的系统误差影响两个方面入手,以实现伪距定位达到分米精度。
削弱伪距观测值的随机误差影响,主要是通过伪距相位平滑技术来实现,削弱观测方程中的系统误差影响主要是通过差分技术来实现
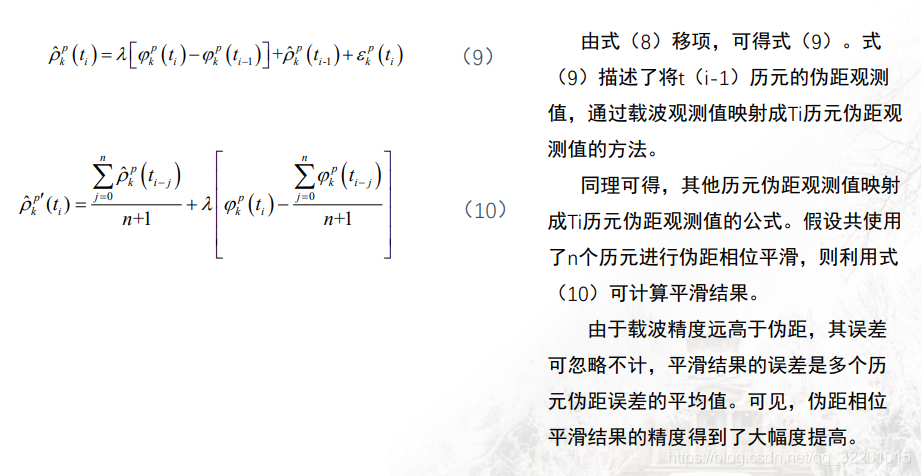
01 伪距相位平滑
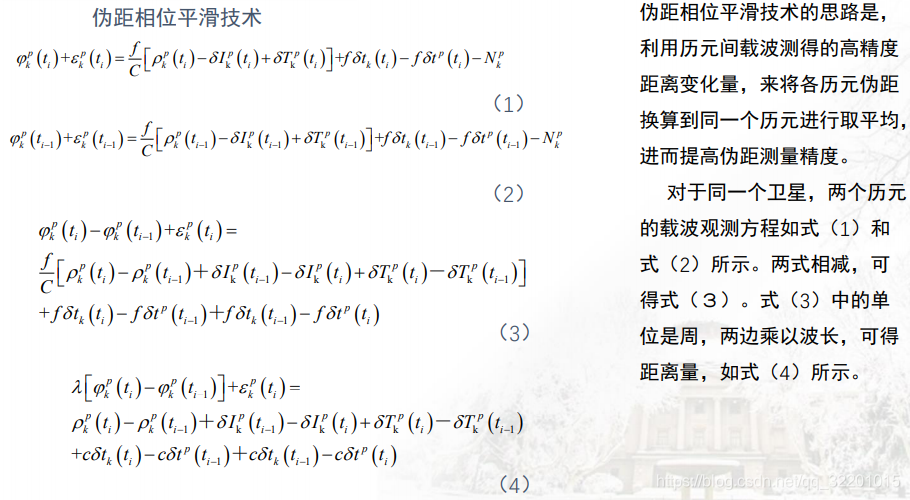
02 差分技术
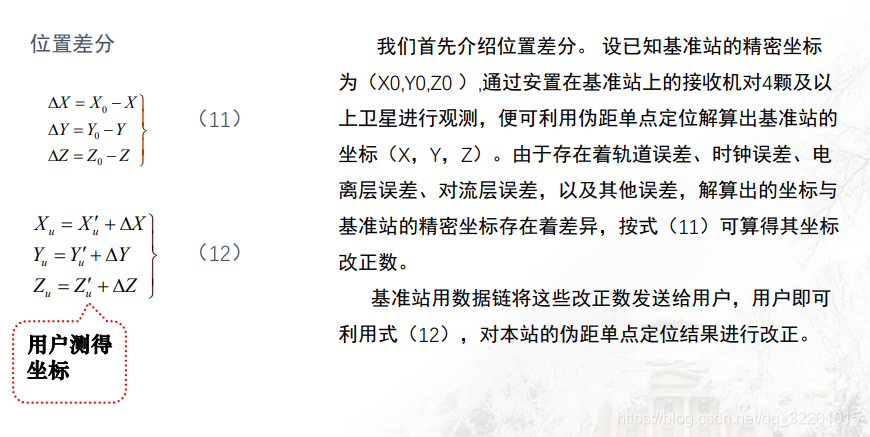
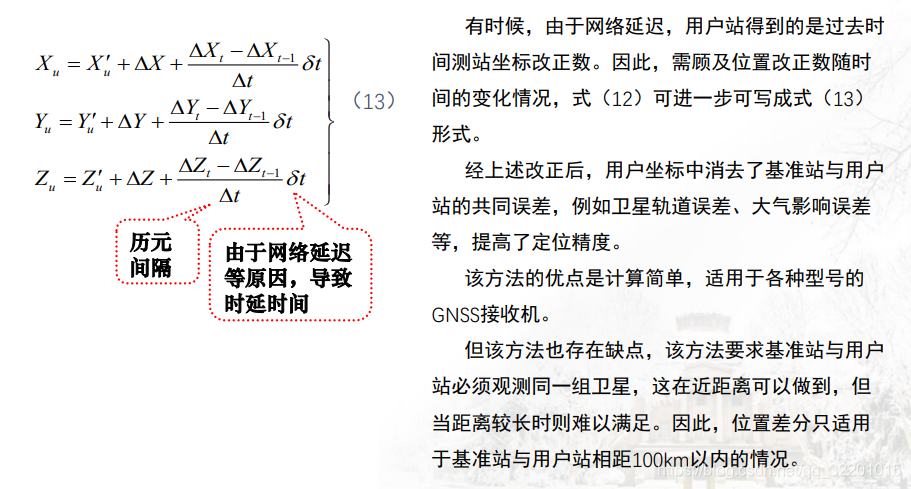
差分技术的实现方法是将一台接收机安置在基准站上进行观测,根据已知的基准站精密坐标,计算出坐标或距离改正数,并通过数据链实时将改正数发送给用户,从而改正用户单点定位结果,提高定位精度。根据基准站发送信息内容的不同,差分定位又分为位置差分和伪距差分两种方式。
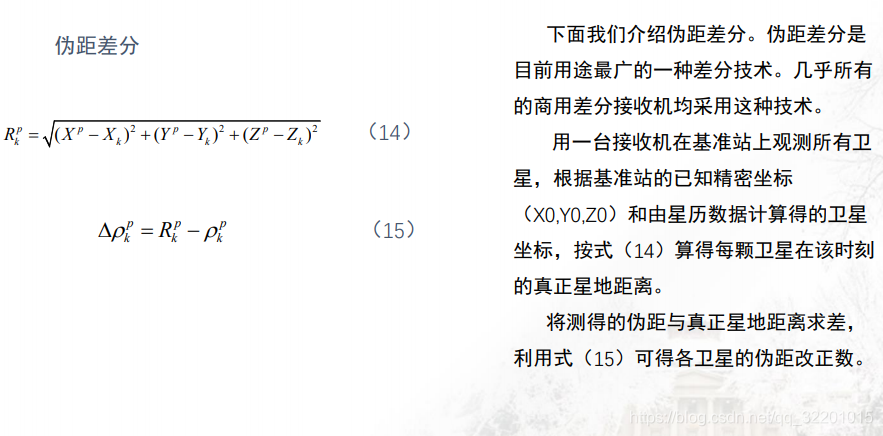
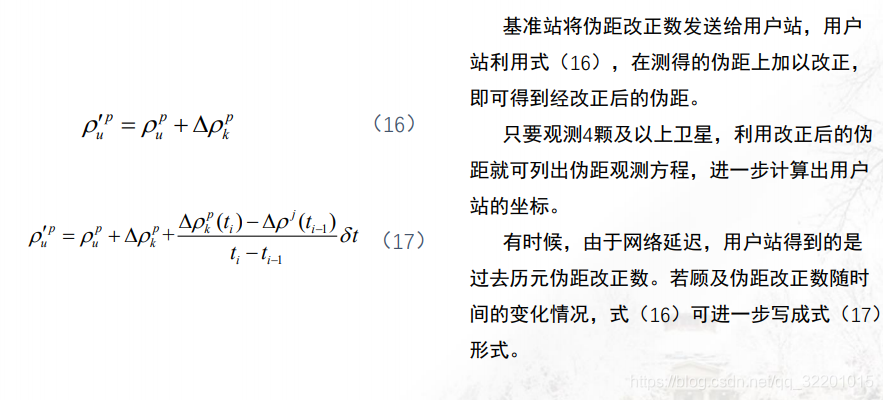
伪距差分具有如下优点:第一,这种方法能提供伪距改正数和改正数变化率,所以在未得到改正数的空隙内能继续高精度定位。第二,基准站提供所有观测到的卫星伪距改正数,而用户站只需接收4颗卫星即可进行高精度定位,无需与基准站接收完全相同的卫星。
但伪距差分也存在着不足,与位置差分相似,随着基准站与用户站之间距离的增加,两站系统误差之间的差异将会明显增加,且这种差异采用任何差分方法都不能予以消除。因此,基准站与用户站之间的距离对伪距差分的精度有决定性影响。
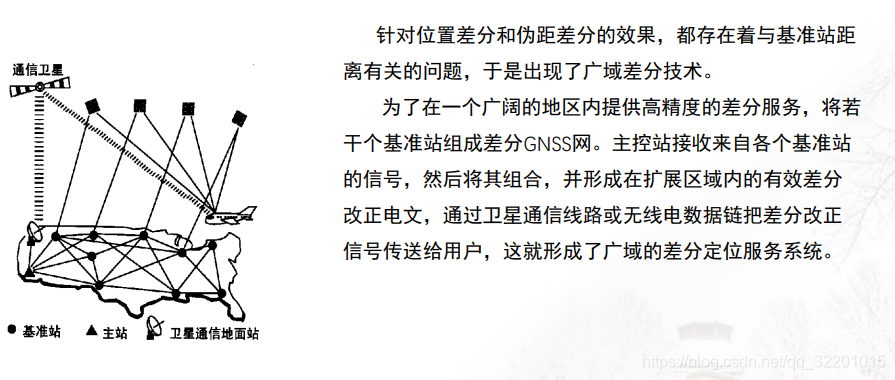
广域差分的基本技术思想是对伪距观测的误差源加以区分,如星历误差,电离层时延,对流层时延,卫星钟差等,并单独对每一种误差分别加以“模型化”,然后将计算出的每一个误差源的数值,通过数据链传输给用户站,进而改正用户站的伪距观测值,实现更高精度的定位。
与位置差分和伪距差分相比,广域差分不仅扩大了差分的有效工作范围,而且保证了该区域的定位精度,因此得到了广泛的应用。

















 3029
3029

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









