






macOS系统在conda中安装的ROS noetic,为了让系统能够找到我们的功能包和可执行文件,直接在终端输入指令echo " source ~/dev_ws/install/local_setup.sh" >> ~/.bashrc,会在未启动ROS所在虚拟环境时报错

因此可以在终端直接输入conda env list或者在激活ROS所在虚拟环境时输入指令echo $CONDA_PREFIX找到虚拟环境所在路径

conda env list
echo $CONDA_PREFIX使用cd指令前往虚拟环境所在文件夹(上面显示路径),再cd etc/conda/activate.d前往activate.d文件夹,再输入ls指令查找文件,找到ROS开头的文件
cd etc/conda/activate.d
ls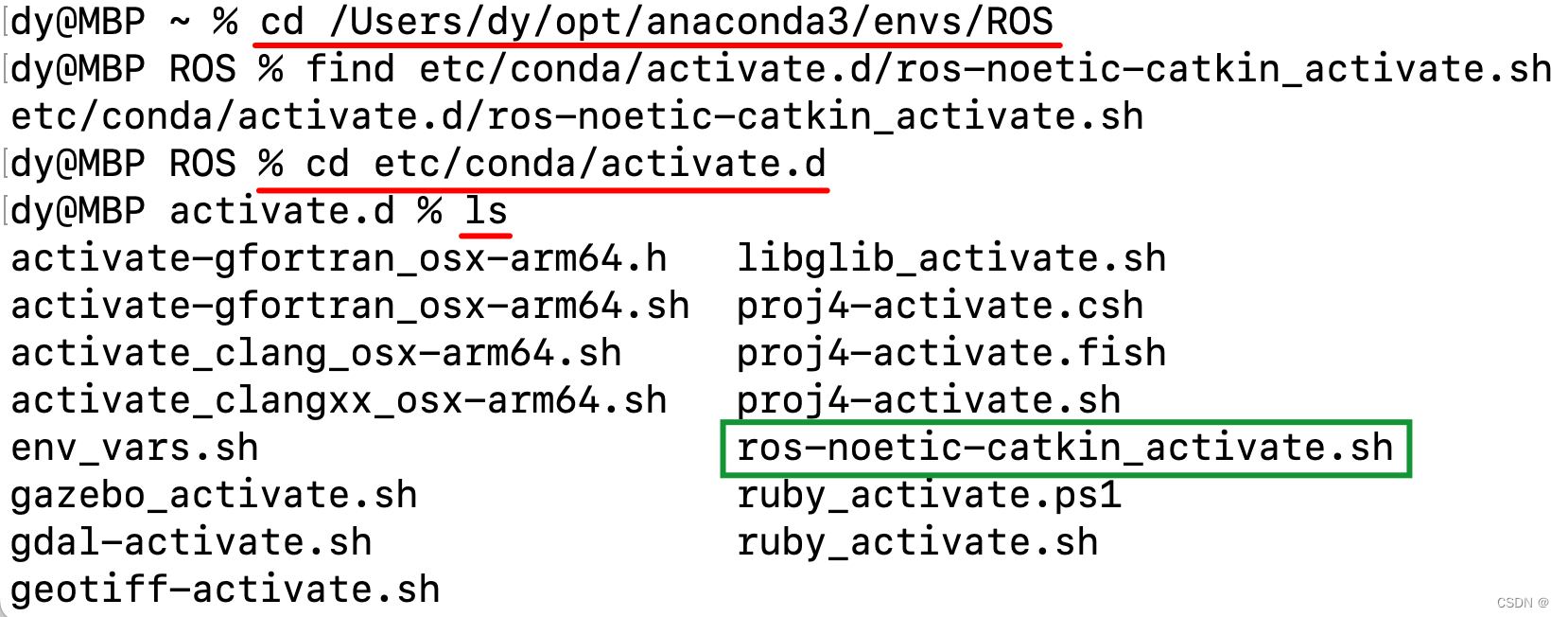
再用vim编辑器打开该文件,找到有source的那一行,在下一行加上工作环境的setup脚本,根据自己文件名进行修改
sudo vim ros-noetic-catkin_activate.sh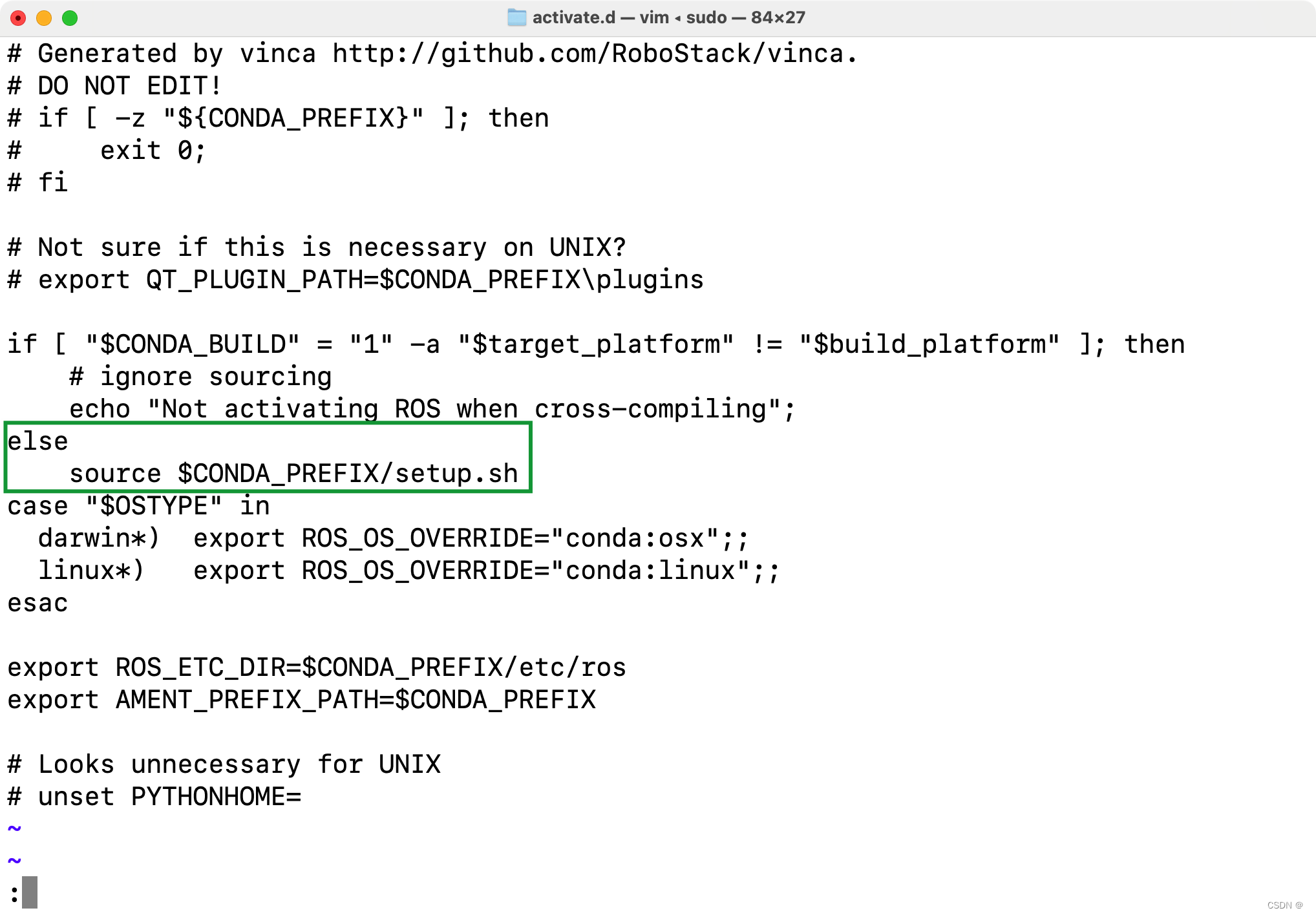
绿色方框内即为conda虚拟环境正常启动时自动导入的ROS环境变量,在其下面添加自己的source指令,根据自己电脑终端修改文件类型 .zsh .bash .sh
source ~/catkin_ws/devel/setup.zshsource ~/catkin_ws/devel/setup.bash:wq保存退出后(不会使用vim编辑器可以参考https://zhangvalue.blog.csdn.net/article/details/84984062
再次激活虚拟环境,发现系统可以找到ROS工作空间中的功能包















 689
689











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









