









Sample-based path finding
Preliminaries
在空间中随机撒点,连成树或者图,利用算法寻找路径
characters
不需要明确构建构型空间及其边界,只需要知道一个机器人位形是否处于碰撞中,在对空间有充分认识下进行简单的碰撞测试,碰撞检测是一个单独的模块,可以根据应用程序进行调整,随着碰撞检测的改善,进而实现这些算法,有单查询和多查询不同的方法
Notion of completeness in planning
complete planner: 在有限时间内正确查找到路径(A* , JPS)
Probabilistic Complete Planner: 概率完备解;如果存在解,规划器能够使用随机采样找到解,也就是如果存在一个可行解,当样本数趋于无穷大时,找到的概率为1。
Resolution Complete Planner: 在grid中寻求解,如果存在解,规划器使用确定采样找到解
解:
寻找函数的解方法:梯度下降法,牛顿法等
如何探索解空间的连续性:在连续的构型空间采样出离散的构型空间样本,来构建图或者树的结构来表征解空间的连续性,采样一般有批次或增量式进行,
Pobabilistic Road Map(PRM)
概率路图
T
-
a graph structure
-
2阶段
-
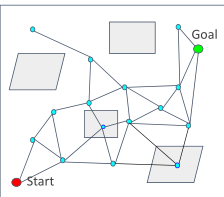
Learning phase
在位形空间中随机采n个点
删除有碰撞的点
连接点,起始点和终点需要包含,连接与点接近的点(虚线不能够连接),但是连线不能经过障碍物,并且不考虑机器人的位形约束
撒点

-
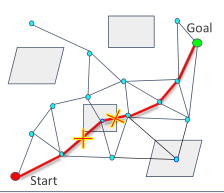
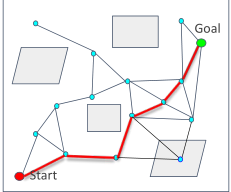
Query phase
在图中搜索路径,采用A*或者Dijistra算法,可以看做使用路线图代替了grid map,可以反复利用这个图,而无需得到整个图

-
-
Pro and Cons
Pro: probabilistically complete
cons: 在状态空间上构建图,但不特别关注生成路径,不够有效率,机器人的运动学约束也会容易不满足, 而且需要解决2点边界值问题
Improve efficiency
Reason
- Lazy collision-checking
只关注距离准则,然后找到路径,如果有障碍物,则删去,重新构建图,
这样避免了learning phase中碰撞检测(碰撞检测费时)
Rapidly-exploring Random Tree(RRT)
与PRM不同之处在于,
快速搜索随机树大致步骤:采样点,连接构成树,检测无误,然后插入新点,进行迭代,特点是增量式构建
相较于PRM:构建的不是图,而是树,不需要使用A*算法,加入终点便结束了
pseudocode
Input : M,xInit,xGoal
Result: a path from xInit to xGoal
T.init();//2 red point
for i =1 to n do
xRand<- Sample(M);//获得xrand点
xNear<-Near(xRand,T);//寻找距离xrand最近的点
xNew<-Steer(xRand,xNear,StepSize);//找到xnew, stepsize步长
Ei<-Edge(xNew,xNear);//
if CollisionFree(M,Ei) then//碰撞检测,无障碍物则
T.addNode(xNew);//xnew被添加到树中
T.addEdge(Ei);
if xNew=xGoal then
success();
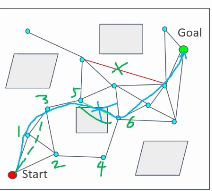
演示图
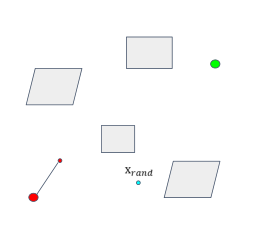
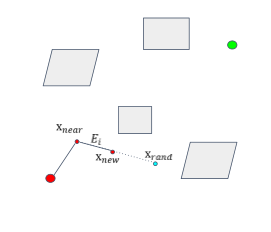
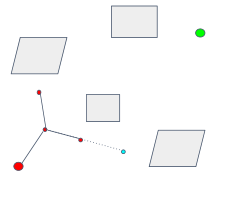
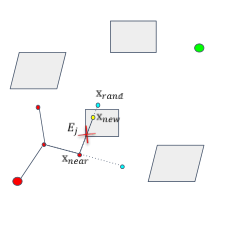
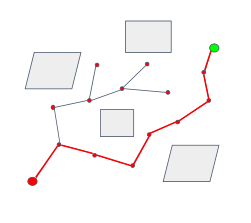

首先确定空间中起点和终点的位置,在空间中随机撒点,得到x_rand;寻找距离最近的x_near(一开始时x_start),然后以一定的步长扩展x_new,如果x_new不在障碍物上,那么就扩展,知道x_new与终点的距离小于一个阈值,便生成目标点,得到最终路径,反向查询,沿终点回溯到起点。最终的父节点是起点。
Pros
- 具有目标导向性,计算复杂度低
- 能在高维空间中相对快速找到满意解
- 适应能力强
Cons
- 并非最优的路径
- 对整个空间采样,效率不高
- 在狭窄空间难以找到路径
improving
- 使用kd-tree加速搜索(对点进行划分)
左图展示RRT树;中间得到一个采样点rand,利用kd-tree能够找到距离最近的节点
在空间中的划分

右边为划分依据,先找横向x中位数,再找纵向y中位数,进行划分,如上图,4.0为所有节点x的中位数,进行划分,可取2.2和4.2,这里左边2.2取为中位数,右边4.3,依次类推,具体可以参考链接 - Bidirectional RRT / RRT Connect
一次撒点,两树构建,针对终点在narrow passage

Optimal Criterion
采用动态规划思想,离散形式如下:

B(j)表示j的前驱
D(i,j)表示从i状态到j状态的代价。


在运动规划中,状态图(或网格)几乎肯定是成环的。
每个状态可以在任何级别(步长),并且只能通过范围查询或k-NN查询访问状态。
基于抽样的方法在增量或批量生成隐式随机几何图(random geometric graph RGG)时引入了一些随机性。它仍然可以被看作是图形搜索。
Optimal sampling-based path planning methods
RRT*
- pseudocode

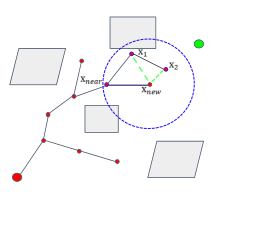
初始化部分与RRT相同
与RRT不同之处在于树的扩展,Xnew没有直接选择最近的点作为父节点,而是搜索多个领域(蓝色圈)节点,从而选择父节点Xnear,如X2原来的父节点是X1,但是通过搜索发现Xnew节点作为父节点更近,那么通过rewire()剪枝操作,删去X1-X2将其父节点更新为Xnew。
视频演示
RRT生成路径之后便停止,RRT*生成路径之后还在不断优化。
关于蓝圈的大小
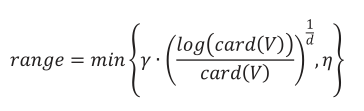
η
\eta
η:扩展节点的步长
card(V):集合的势,也就是集合元素的个数,这里表示节点的个数
d表示构型空间的维数
γ
\gamma
γ:为了达到渐进最优的系数
ξ
\xi
ξ单位球的体积
考虑时间维度的话可以参考 Revised in Kiril Solovey et al., “Revisiting the Asymptotic Optimality of RRT*", ICRA, 2020
工程实现优化方法
优化数据结构,如采用KD树,
对树进行剪枝;
延缓碰撞检测,对生成的父节点进行排序;
使用双向树,起点终点各生成一颗树。
重复利用数据,可以记录碰撞检测,一般代价要对称。
RRT* flaw
过度探索,"重连"无希望的顶点。


探索不足,“Rewire”仅在新节点被添加到生成树之后发生,并且只在其“Near”节点上起作用。
•它不能保证任何中间迭代的中间路径是最优的

RRT*到这里便结束了,但其实还可以在范围内的其他节点添加

RRT#
改正了上面RRT*的两大缺陷,生成渐进最优路径更快了

Kinodynamic-RRT*
采用曲线取代线段连接,更好的符合机器人的运动学约束


视频
Anytiem-RRT*
在机器人跟随路径运动时,实时更新树,优化路径

Advanced Sampling-based Methods
Informed Sampling


Informed RRT*
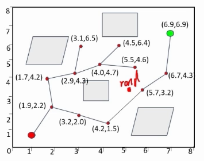
可以不用在整个空间在撒点,当路径找到,在路径处撒点,在一个以起点和终点为焦点椭圆内撒点,以红色点和绿色点为焦点画圆
L2 Informed set


以欧式距离为代价评判,

缺点:除了L2范数代价(欧氏距离),几乎不能显式地应用于其他代价,对于间隙很长的地图,搜寻慢

GuILD
Guided Incremental Local Densification
虽然迭代可能没有找到一个更短的路径到达目标,新的更短的路径到搜索树中的其他顶点可以立即改进采样策略。

informed集保持不变。但是,GuILD 利用搜索树中改进的成本来更新本地子集。
初始信标集缩小为进一步的焦点采样,信标和目标之间剩余的松弛用来扩展信标-目标集
在信标和目标之间,可以花费更大的路径长度预算,但总的来说仍然可以产生更短的路径。
Cross-entropy motion planning
首先生成路径(可以借助RRT or RRT*),在轨迹节点周围采样,这些节点构成多高斯模型,得到路径;以节点为均值,均值化后的节点重新进行采样,继续得到更多路径。方差则是通过指定,如图,通过两次采样,得到两条路径,共三条路径,多个轨迹的多个节点求均值,作为新多高斯模型参数,然后再进行采样,不断优化,从而找到路径。



Other variants
• Lower Bound Tree RRT (LBTRRT)[a]
• Sparse Stable RRT[b]
• Transition-based RRT (T-RRT)[c]
• Vector Field RRT[d]
• Parallel RRT (pRRT)[e]
• Etc.[f]
参考论文
[1] An Overview of the Class of Rapidly-Exploring Random Trees
[2] http://msl.cs.uiuc.edu/rrt/
[a] https://arxiv.org/pdf/1308.0189.pdf
[b] http://pracsyslab.org/sst_software
[c] http://homepages.laas.fr/jcortes/Papers/jaillet_aaaiWS08.pdf
[d] https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6606360
[e] https://robotics.cs.unc.edu/publications/Ichnowski2012_IROS.pdf
[f] https://github.com/zychaoqun
Implementation
open motion planning Library
Moveit
Tutorials
Ros Navigation stick
move_base

常见
- Global planner
A*,D*,RRT,etc - Local planner
DWA,Eband,Teb,etc
















 1055
1055











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









