







文章目录
一、Ubuntu18.04安装matlabR2019A
下载安装包
下载完成后解压
右击.iso镜像文件,选择使用其他程序打开

选择磁盘映像挂载器
 打开后会在桌面上看到对应的磁盘,双击打开
打开后会在桌面上看到对应的磁盘,双击打开

会进入下图的目录,在该目录右键在终端打开

然后在终端输入pwd得到当前路径

然后新开一个终端,输入sudo /media/xj/MATHWORKS_R2019A/install
不同的电脑sudo后面的路径可能不一样
就是在上一步pwd的路径后面加一个install
然后回车执行,会出现下图的安装界面,按图中的选择进行下一步

选是继续下一步
 输入序列号
输入序列号
选择安装路径,然后下一步

选择安装的工具,继续下一步
 下一步安装
下一步安装

安装完成后如图
 安装完成打开安装目录
安装完成打开安装目录
 右键在终端打开
右键在终端打开
执行
sudo chmod 777 R2019a

将下面的两个文件复制替换到matlab安装目录

先找到安装目录下的这个文件

右键在终端打开
执行sudo rm libmwlmgrimpl.so删除
然后将这个文件替换进去
cp libmwlmgrimpl.so /usr/local/Polyspace/R2019a/bin/glnxa64/matlab_startup_plugins/lmgrimpl
 同理,创建licenses文件夹,文件夹里只将license.lic添加进去
同理,创建licenses文件夹,文件夹里只将license.lic添加进去
最后在下图的安装目录下执行./matlab,正常的话matlab软件会打开,可以正常使用

二、matlab simulink模型生成嵌入式代码

打开一个simulink模型
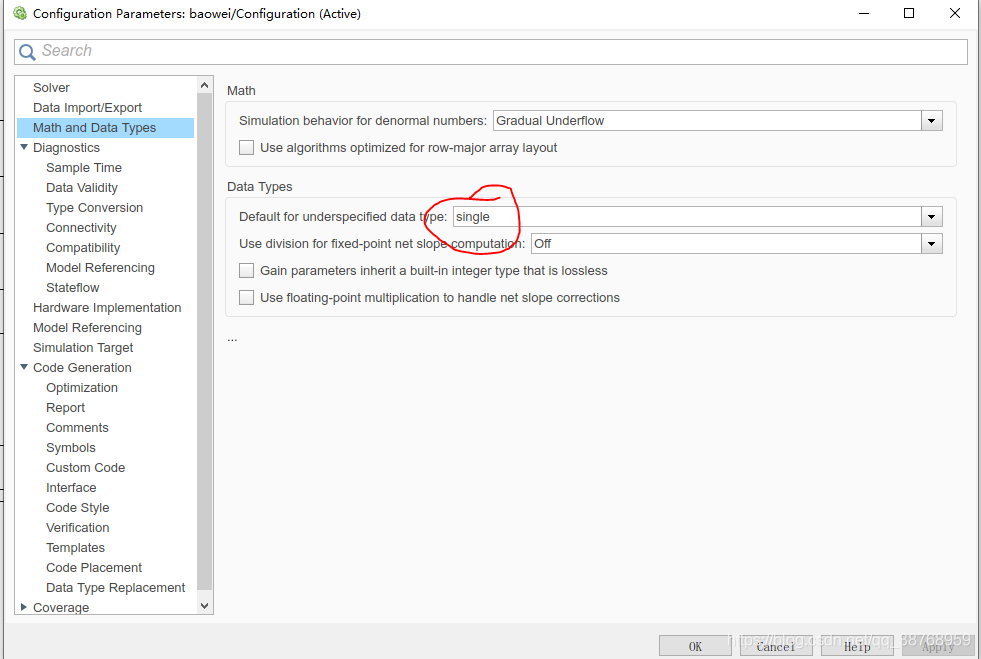
打开设置页面
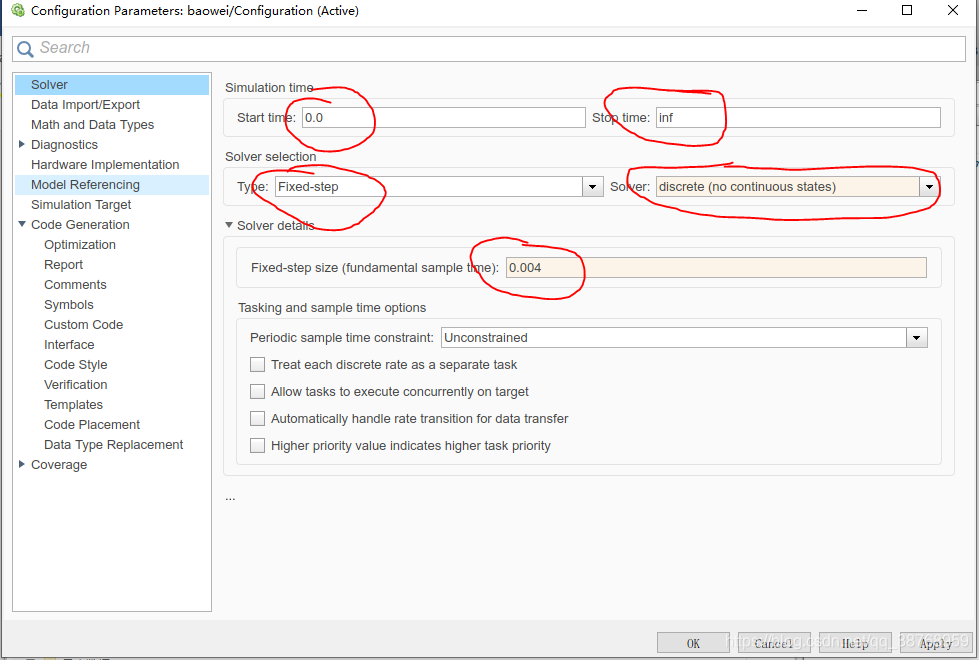
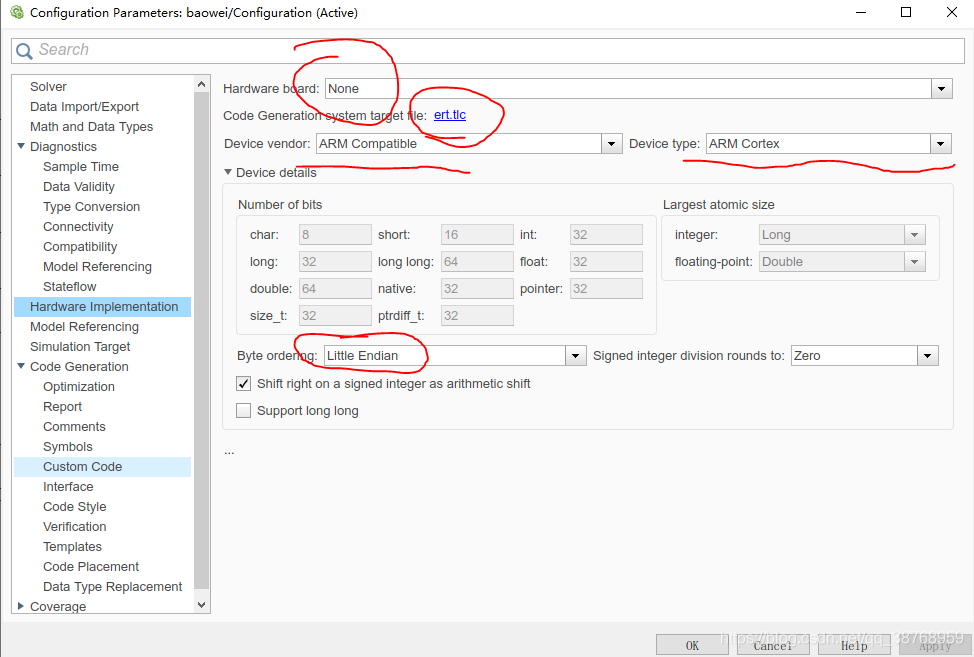
打开上面界面,点击ert.tlc

上图的两个地方不要设错,之前设置的时候因为没有勾选package code and artifacts,导致一些库不会自动打包到生成的文件里,这里取压缩包名为aa。
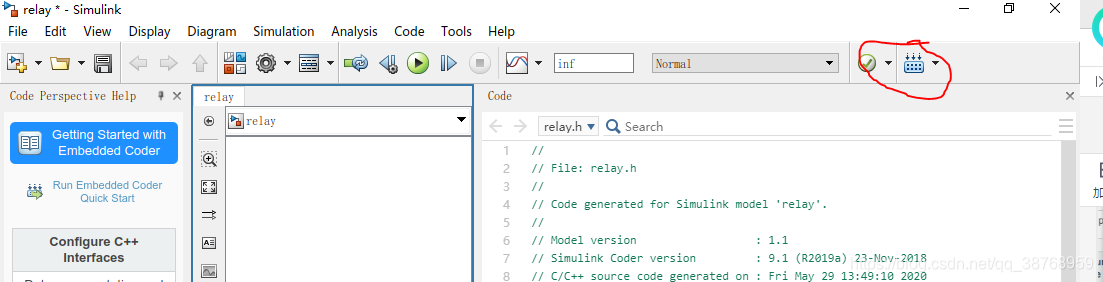
设置完后点击生成按钮
会在当前工作目录下生成嵌入式代码


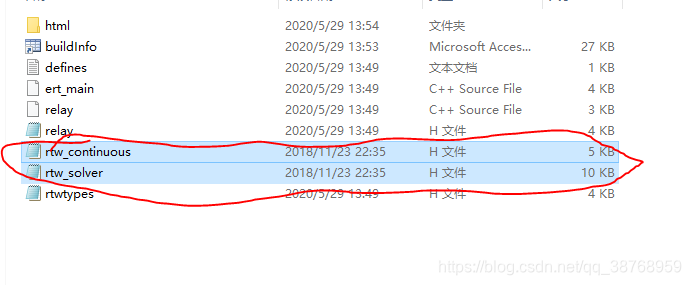
把这个压缩i包解压
打开后有两个文件夹,上面的是生成的代码和头文件
下面是matlab的一些头文件
在编译嵌入式代码的时候,需要把下面那个文件夹的头文件和上面的那个文件的文件一起编译,不然可能提示缺少头文件。
三、simulink将数据输出用plot显示
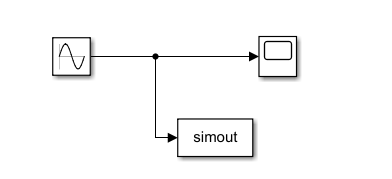
将数据输出用simout输出到工作空间,
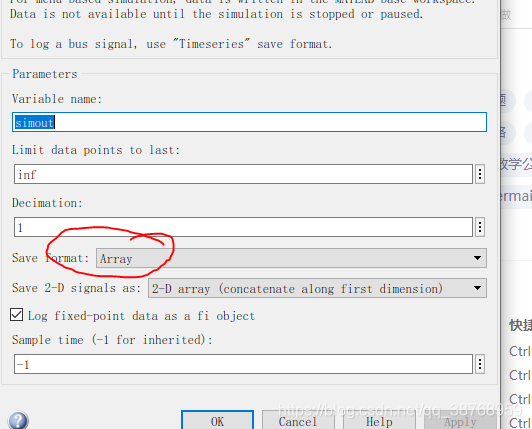
输出类型为数组
然后编译,双击打开工作区out
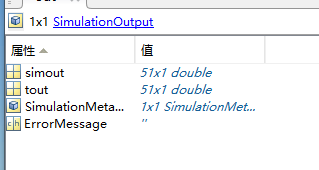
可以看到数据已经输出到工作空间
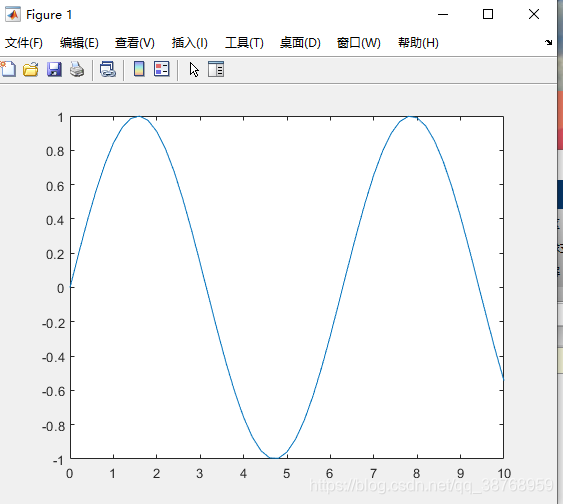
打开命令行串口,输入>> plot(out.tout,out.simout)
可以看到数据图
四、ubuntu下ulog文件转csv文件并在matlab里画图
在需要转化的ulog文件目录下
执行
ulog2csv XXX.ulog,会自动在当前目录下生成一系列csv文件
将csv文件拖到matlab界面中,会弹出下面的页面,点击导入

会提示导入到工作区,这时可以调用画线函数plot进行划线


调用
plot(log520201010105015sensormag0.timestamp,log520201010105015sensormag0.x)
可以得到一条线
如果要在同一个页面画多条线,可以用hold on
plot(log520201010105015sensormag0.timestamp,log520201010105015sensormag0.x)
hold on
plot(log520201010105015sensormag0.timestamp,log520201010105015sensormag0.y)
得到下图

给曲线添加注释可以通过legend(‘UAV1’,‘UAV2’,‘UAV3’,‘UAV4’,‘UAV5’);















 1971
1971











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











