







 本课程基于VladyslavUsenko的basalt-mirror项目,深入解析SLAM算法的实现细节,包括数据集加载、前后端初始化、光流跟踪、特征点处理等关键步骤。
本课程基于VladyslavUsenko的basalt-mirror项目,深入解析SLAM算法的实现细节,包括数据集加载、前后端初始化、光流跟踪、特征点处理等关键步骤。
参考源码:https://github.com/VladyslavUsenko/basalt-mirror 注释版
在此基础上添加更详细的注释
课程《深蓝学院SLAM开源算法解析》
vio.cpp
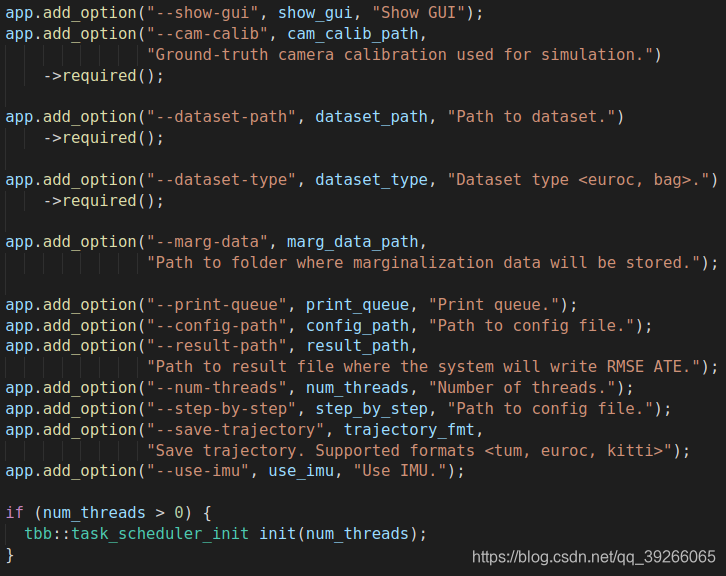
step1: 命令行参数解析
-
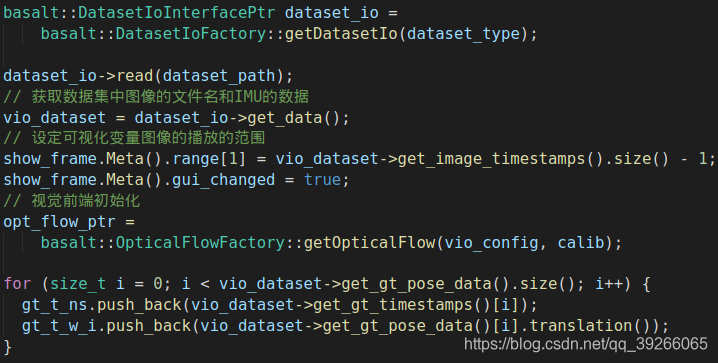
step2:load camera calibration

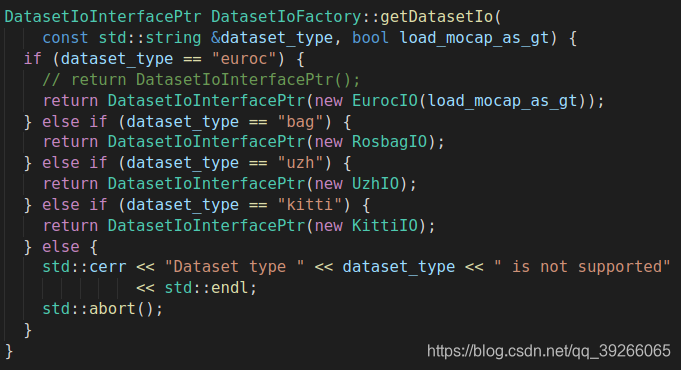
step3:加载不同的数据集,视觉前端初始化
- 查看支持哪些类型的数据集(euroc、bag、uzh、kitti)
step4:后端初始化
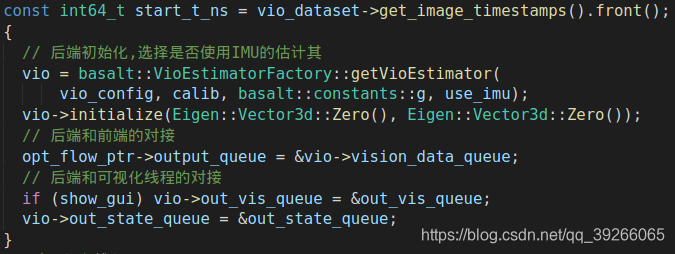
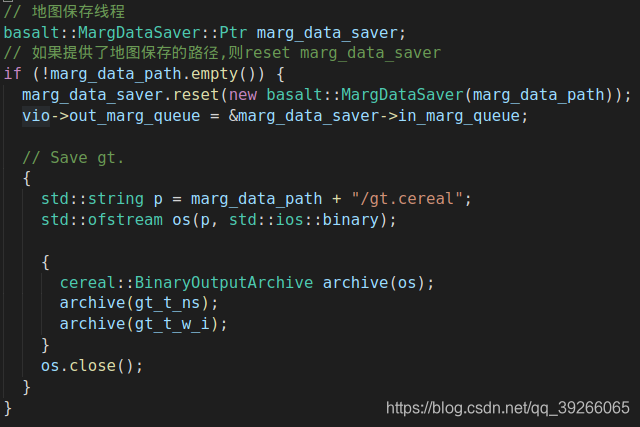
step5:地图保存线程的创建
step6:开辟新线程输入数据

- 1.Feed functions,将图像push到前端opt_flow的输入队列中
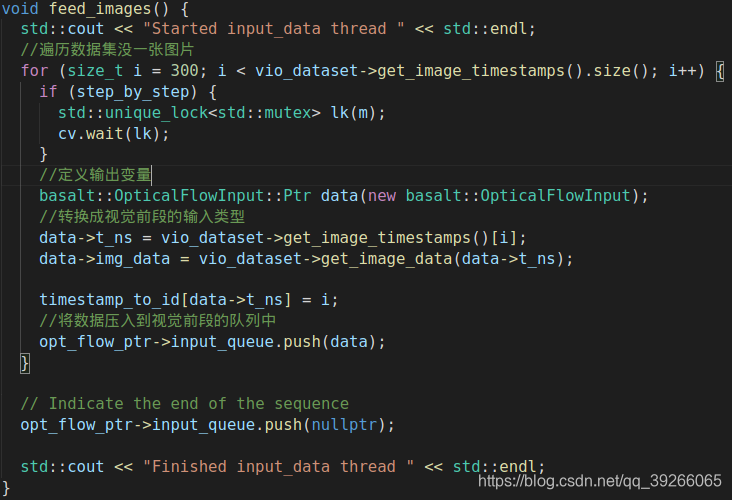
输出和输出都是一个使用tbb实现的线程安全队列
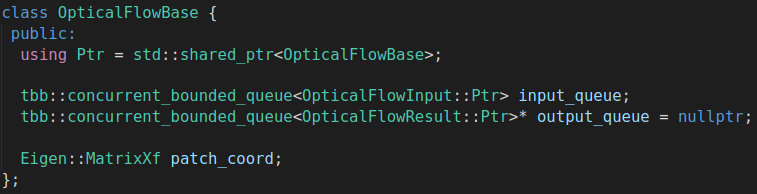
输入的数据类型

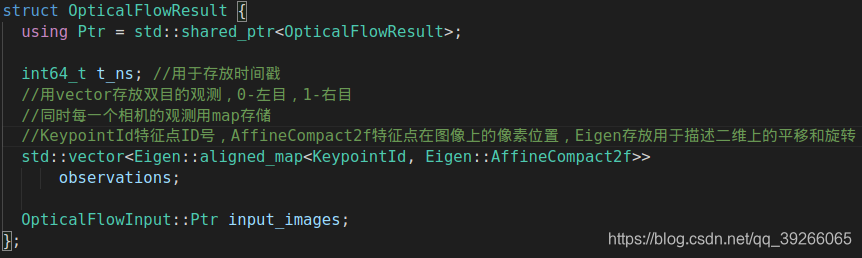
输出数据类型
光流的构造:1.点到点光流 2.帧到帧光流

- 2.IMU feed function, 将IMUpush到后端
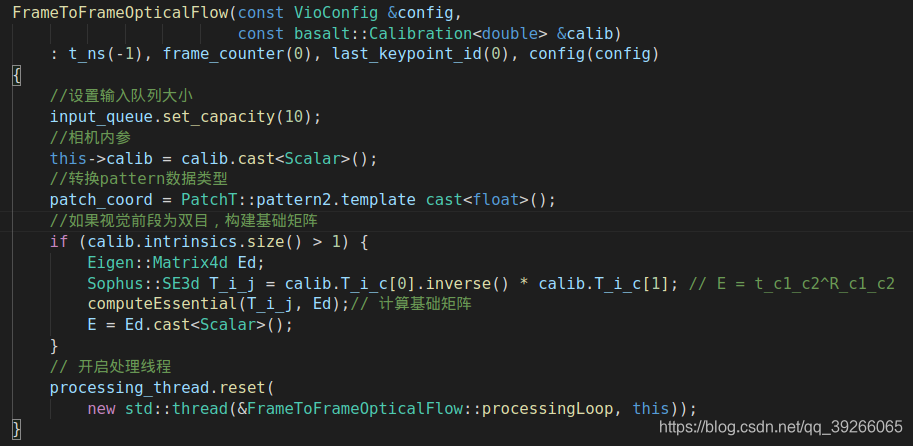
光流跟踪
-
构造函数->开启处理线程
-
处理线程->processFrame
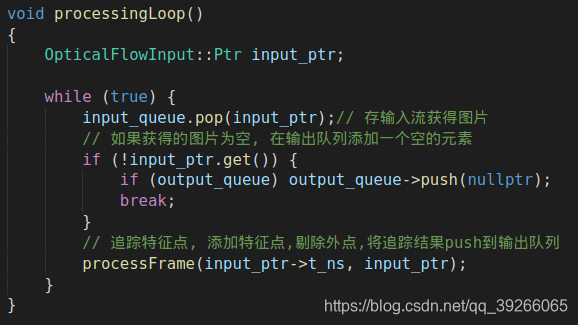
3.processFrame -
初始化
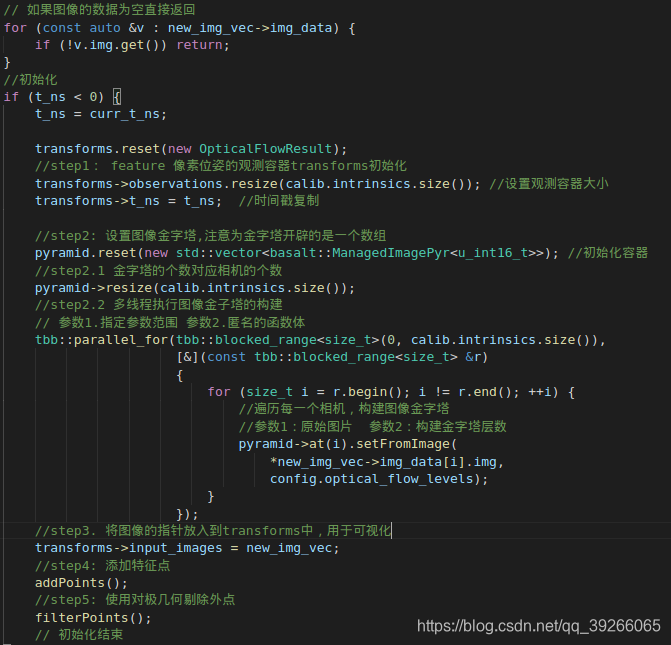
addPoints()
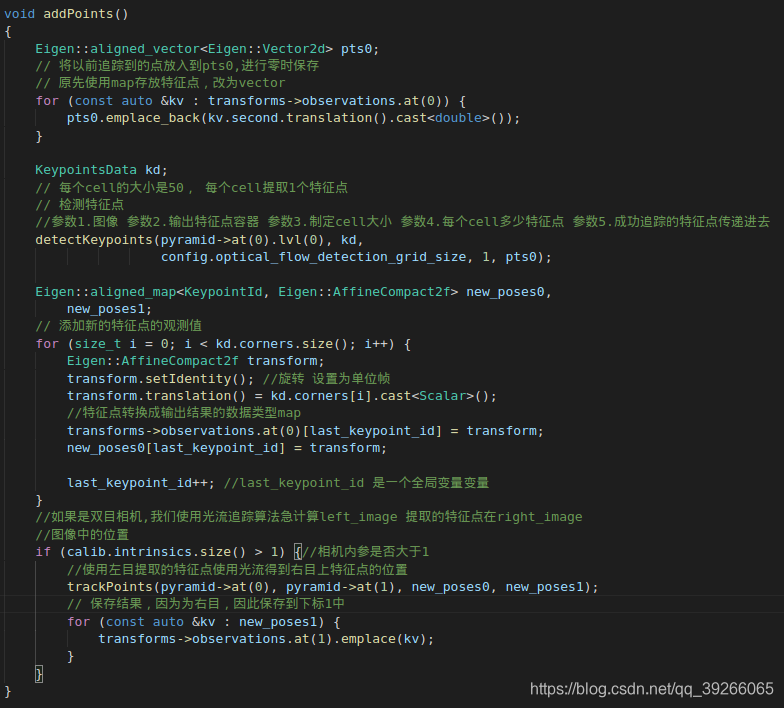
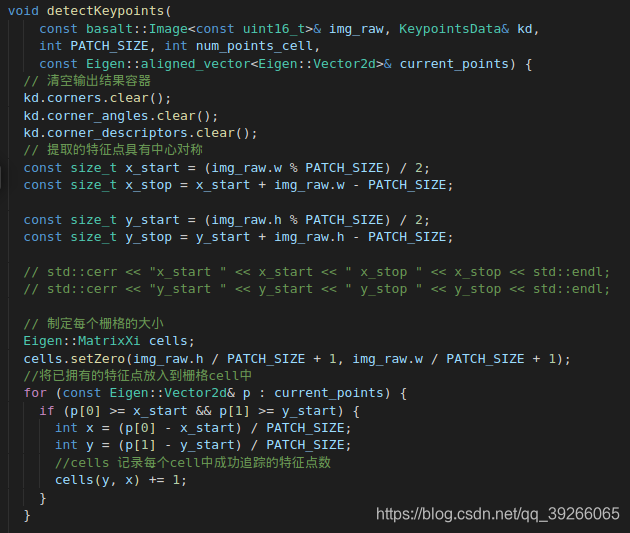
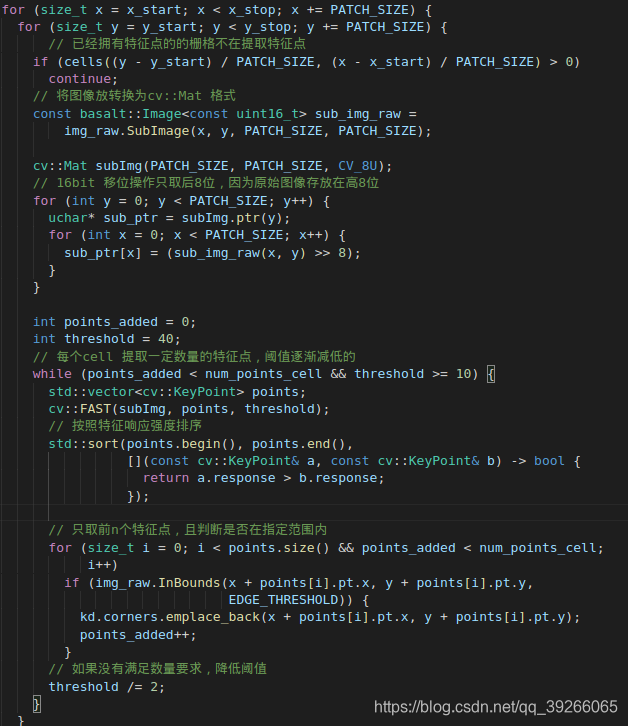
detectKeypoints()
trackPoints()
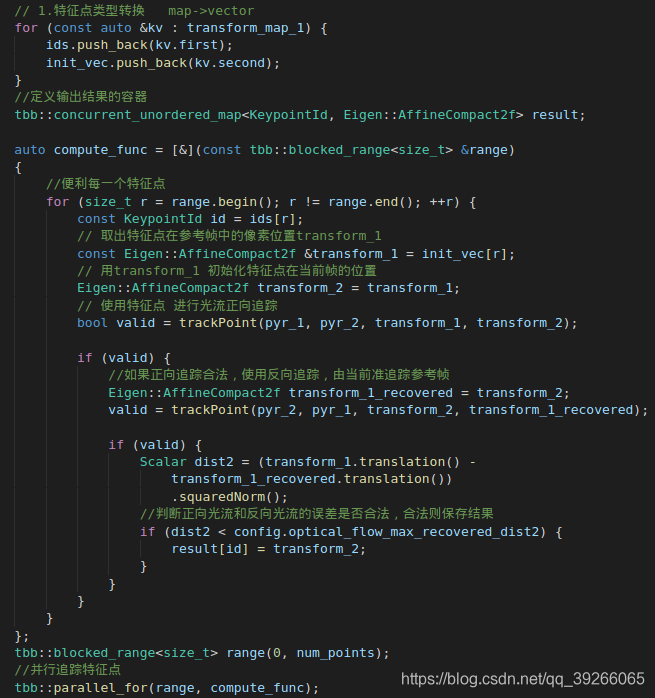
点到点光流跟踪 trackPoint()
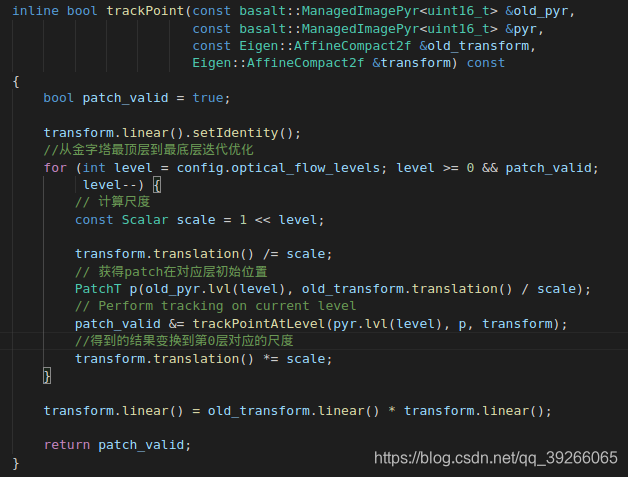
当前帧的光流跟踪
trackPointAtLevel()
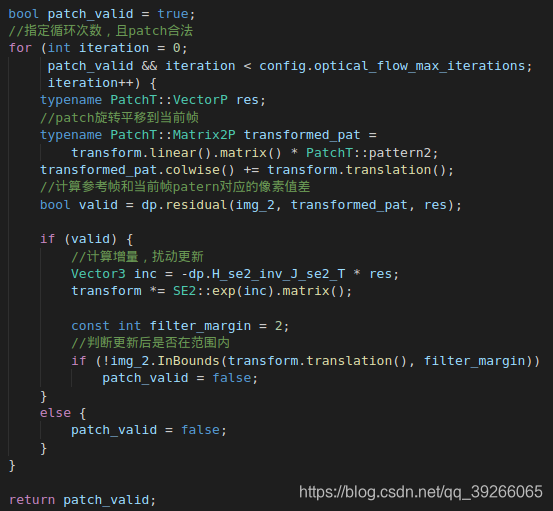
以上,添加特征点的过程结束,接下来剔除外点。
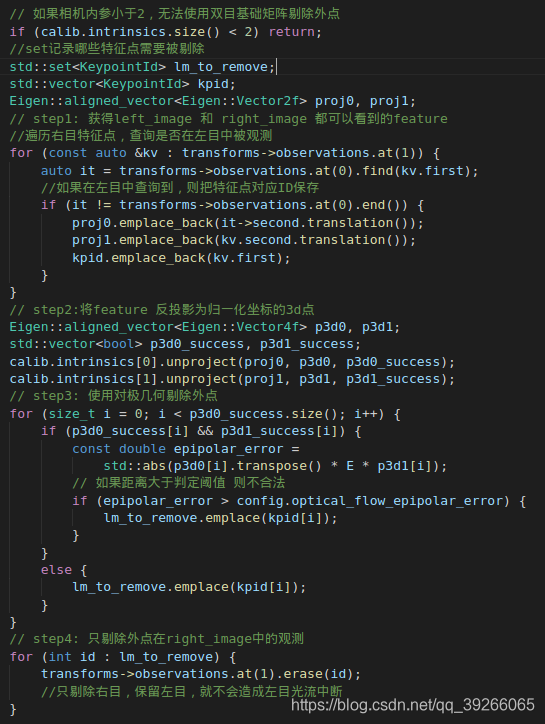
filterPoints();
-
追踪
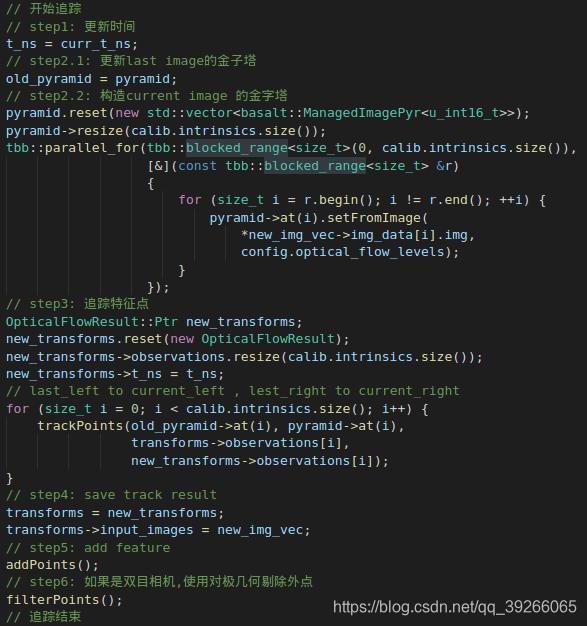
-
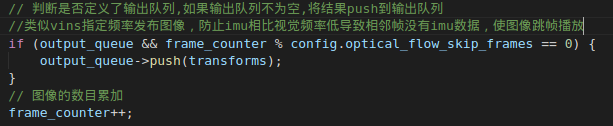
输出


















 1325
1325

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











