







像素的物理尺寸(像元尺寸):dx,dy
像素到物理尺寸的转换关系:
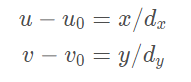
矩阵形式:

相机坐标系:

矩阵形式:


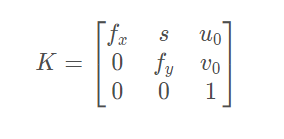
尺度因子λ,K为3*3矩阵内参
K为内参矩阵,s为倾斜因子
相机坐标系和世界坐标系用旋转和平移表示,通过一个3*3单位正交矩阵R和3*1平移矩阵t。


旋转矩阵R和平移矩阵t称为相机外参
世界坐标到uv坐标变换:

投影矩阵M为:内参矩阵和外参矩阵的乘积。















 8901
8901











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









