







1 intro
1.1 背景
- 轨迹恢复旨在通过恢复给定轨迹的缺失点来增加样本率,从不同的角度丰富低采样样本轨迹
- 最近的两种方法DHTR、MTrajRec,都通过Seq2Seq的框架,用一个编码模型来生成给定轨迹的表示,和一个解码模型来逐点恢复轨迹
- 然而,他们有两个主要限制
- 忽略了道路网络结构,使得预测在一定程度上缺乏空间一致性
- 使用一个简单的编码模型(如一个简单的GRU)来表示轨迹,因此无法充分利用GPS轨迹的丰富上下文信息

- 作者这里举了五角场的例子
- (a):三个橙色点形成了一个低采样率的输入轨迹(复旦大学、黄兴路国定路、黄兴公园)
- 每两个连续点之间的距离相对较长(因为它们之间有许多缺失的GPS点)
- 轨迹恢复的任务是恢复缺失的点,并将所有GPS点(包括输入点和恢复点)映射到道路网络,以生成一个高采样率的轨迹
- (a):三个橙色点形成了一个低采样率的输入轨迹(复旦大学、黄兴路国定路、黄兴公园)
- 为了保证恢复轨迹的高精度,道路网络结构和输入轨迹的上下文信息都至关重要,论文认为重要性主要体现在四个方面:
- 当两个新生成的连续点位于两个不同的路段时,我们必须依赖道路网络来恢复轨迹
- 如图1(b)所示,新点q4和q5靠近一个有复杂拓扑结构的主要交叉口I1。如果不考虑道路网络结构,就不可能恢复底层的路段
- 自然情况下的原始GPS点有误差
- 例如,大多数GPS启用的智能手机在开阔天空下准确到4.9米半径
- 如图1(a)所示,原始GPS点p1、p2和p3没有位于任何路段上
- 底层道路网络提供了纠正错误的有效手段,因为车辆必须沿着道路网络移动
- 输入轨迹中的原始点可能彼此相距甚远,底层道路网络揭示了车辆如何从一点移动到另一点
- 不能简单地用直线连接图1(a)中的p1到p2
- 输入轨迹中的两个连续GPS点可能位于两个不同的路段,而连接它们的可能有多条候选路线
- 在图1(c)中绘制了从p1到p2的三条候选路线(邯郸路-黄兴路;国定路;国权路),同色的三角形代表一条候选路线
- 轨迹的上下文信息在筛选不可能的候选路线时提供了有用的线索
- 如果走国权路(路径3)的话,去p2再去p3就要绕路
- 地图匹配可以被视为轨迹恢复的一个子步骤,而轨迹恢复更具挑战性
- 因为它不仅将GPS点映射到路段,还恢复真实捕捉到车辆运动的缺失GPS点
- 当两个新生成的连续点位于两个不同的路段时,我们必须依赖道路网络来恢复轨迹
1.2 论文思路
- 提出了一种新颖的基于Transformer的模型,即RNTrajRec
- 带有时空Transformer的路网增强型轨迹恢复框架
- 首先开发了一个基于网格划分的道路网络表示模块,GridGNN,用于学习每个路段的隐藏状态嵌入
- 为了捕获轨迹的空间-时间特征和上下文信息,RNTrajRec接着开发了一个新颖的基于Transformer的模型,即GPSFormer
- 首先通过一个子图生成模块,将轨迹中的每个GPS点表示为围绕GPS点的子图路网
- 然后引入一个新颖的空间-时间Transformer模型来学习GPS轨迹的丰富空间和时间模式。
- 最后使用解码器来恢复轨迹中缺失的GPS点
2 Preliminary
2.1 路网
有向图G = (V, E)
2.2 轨迹
- 轨迹τ/ρ被定义为l元组的序列,即τ/ρ = 〈(p1, t1), (p2, t2), · · · , (pl, tl)〉
- 其中l指的是轨迹的长度,pi指的是τ/ρ中的第i个样本点,ti是τ/ρ中pi的样本时间
- τ:原始GPS轨迹
- ρ:运行地图匹配算法(例如HMM )后的轨迹
- 在原始GPS轨迹τ中,pi记录了它的精确位置,使用纬度和经度,而在地图匹配后的GPS轨迹ρ中,pj根据它所在的路段ej以及移动比率rj ∈ [0, 1)来捕获其位置,该比率捕获了pj在ej总长度上的移动距离
- 原始GPS轨迹τ通常没有固定的样本间隔,我们使用平均时间间隔ετ代替。低样本轨迹有一个长的样本间隔
2.3 地图匹配后的ερ-样本间隔轨迹
具有固定样本间隔ερ的地图匹配后的GPS轨迹,即ρ = 〈(q1, t1) , (q2, t1 + ερ) , ···, (qlρ , t1 + (lρ − 1)ερ)〉
2.4 轨迹恢复
- 给定一个低样本的原始GPS轨迹τ,带有测量误差(例如,图1(a)中的橙色GPS点),轨迹恢复的任务是恢复真实的地图匹配后的ερ-样本间隔轨迹ρ(例如,图1(a)中的蓝色GPS点)。
- 具体来说,对于每个低样本轨迹,它推断缺失的GPS点,并将每个GPS点(包括输入轨迹τ中的GPS点)映射到道路网络上,以获得移动轨迹的真实GPS位置。
- 注意,恢复后轨迹ρ的样本间隔ερ必须远小于给定原始GPS轨迹ετ的样本间隔。
3 模型
3.1 整体架构

3.2 GridGNN:路网表征

3.3 子图生成

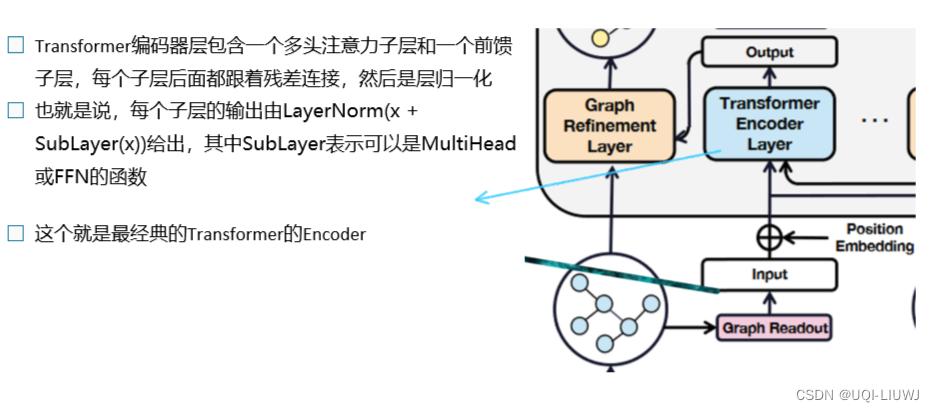
3.4 Transformer Encoder Layer
捕获给定轨迹的丰富时间特征
3.5 图精炼层(Graph Refinement Layer, GRL)

3.6 GPSFormer

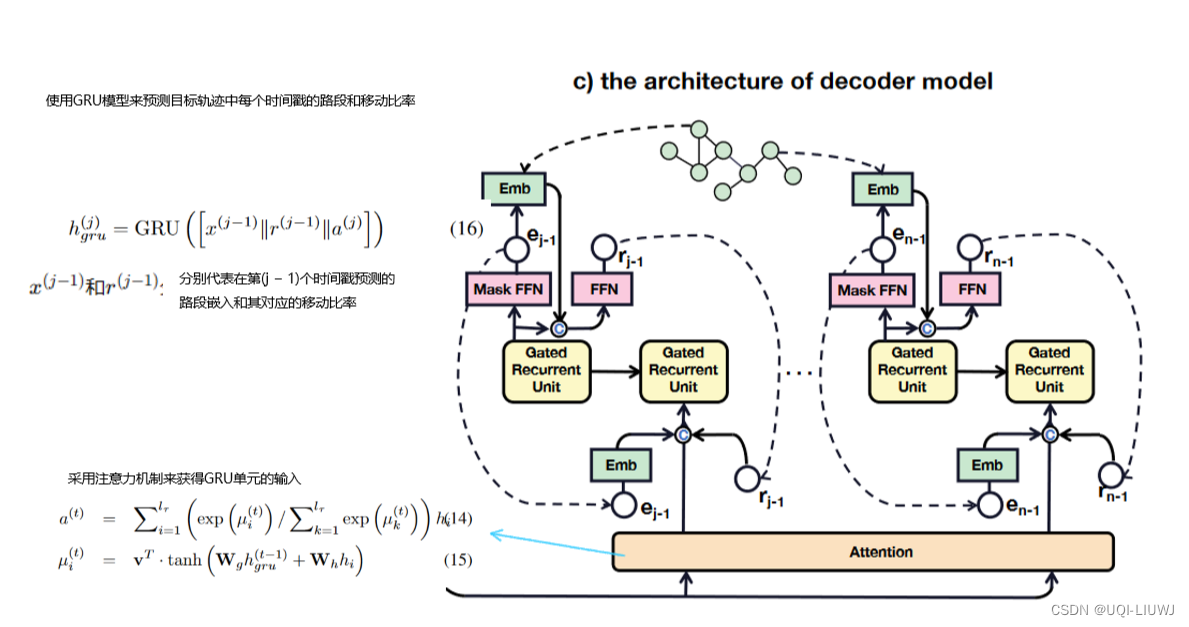
3.7 decoder
4 实验
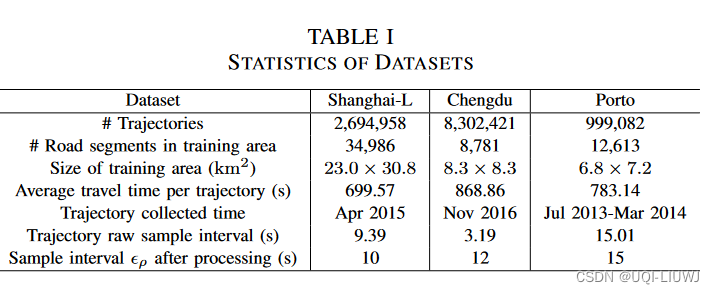
4.1 数据集
4.2 结果



















 283
283











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











