






1distance.py
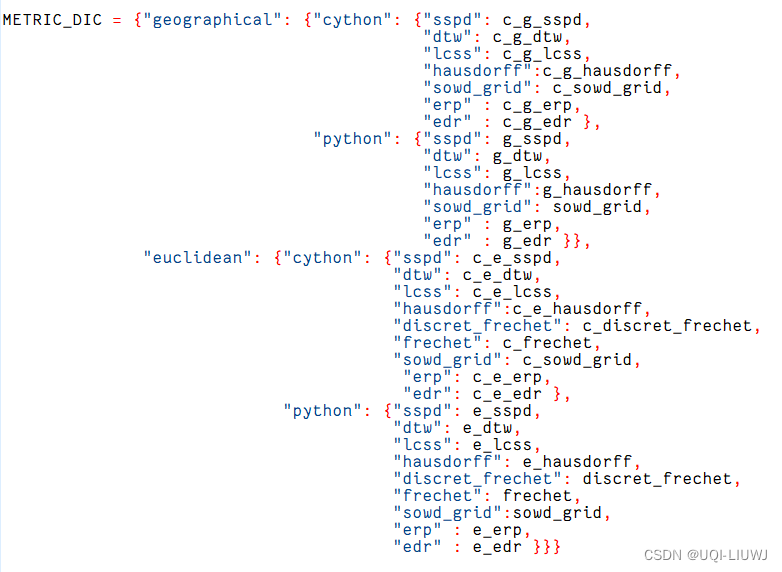
1.1 METRIC_DIC
不同实现方法对应的函数路径
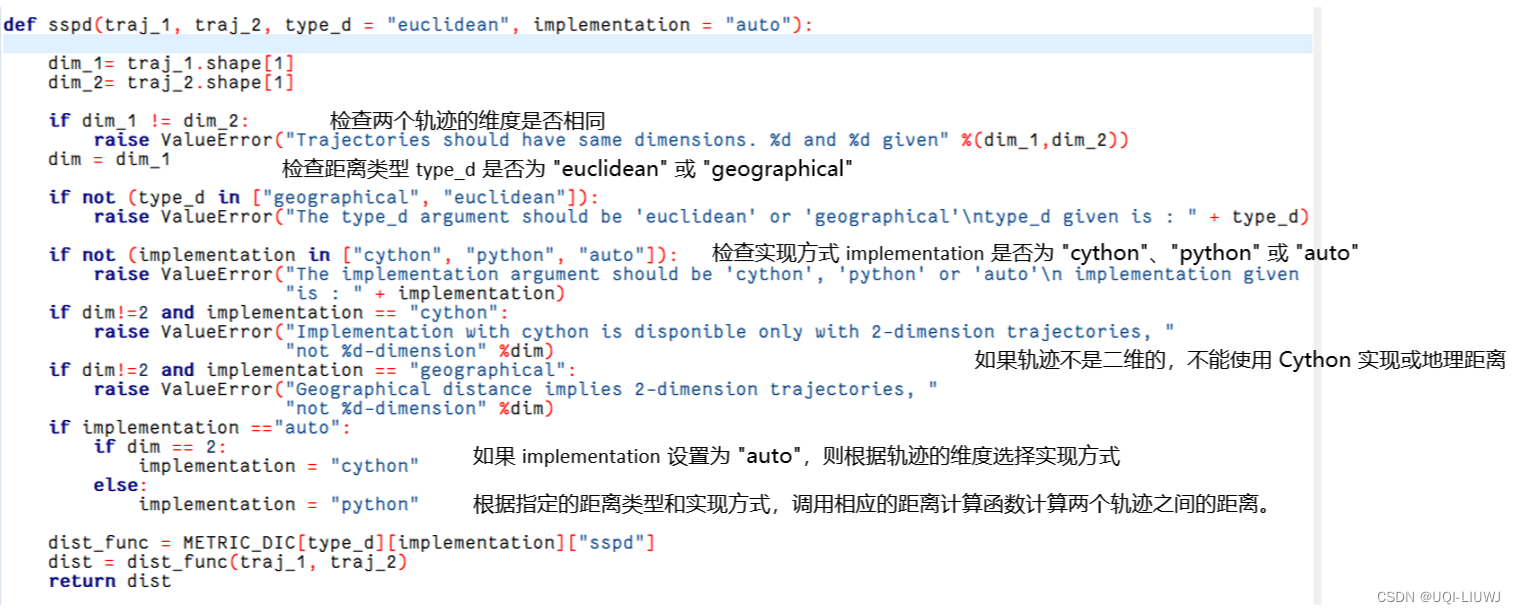
1.2 sspd
功能:
- 计算轨迹
traj_1和traj_2之间的对称化段路径距离。
参数:
traj_1:一个二维 numpy 数组,代表第一个轨迹。traj_2:一个二维 numpy 数组,代表第二个轨迹。type_d:字符串,指定距离的类型("euclidean" 或 "geographical")。- "euclidean" 表示使用欧几里得距离,适用于任何维度的轨迹。
- "geographical" 表示使用地理距离,假设轨迹是二维的,第一维是经度,第二维是纬度。
implementation:字符串,指定实现方式("python"、"cython" 或 "auto")。- 如果轨迹是二维的,默认使用 Cython 实现;否则使用 Python 实现,除非明确指定为 "python"。
返回值:
- 返回一个浮点数,表示两个轨迹之间的对称化段路径距离。
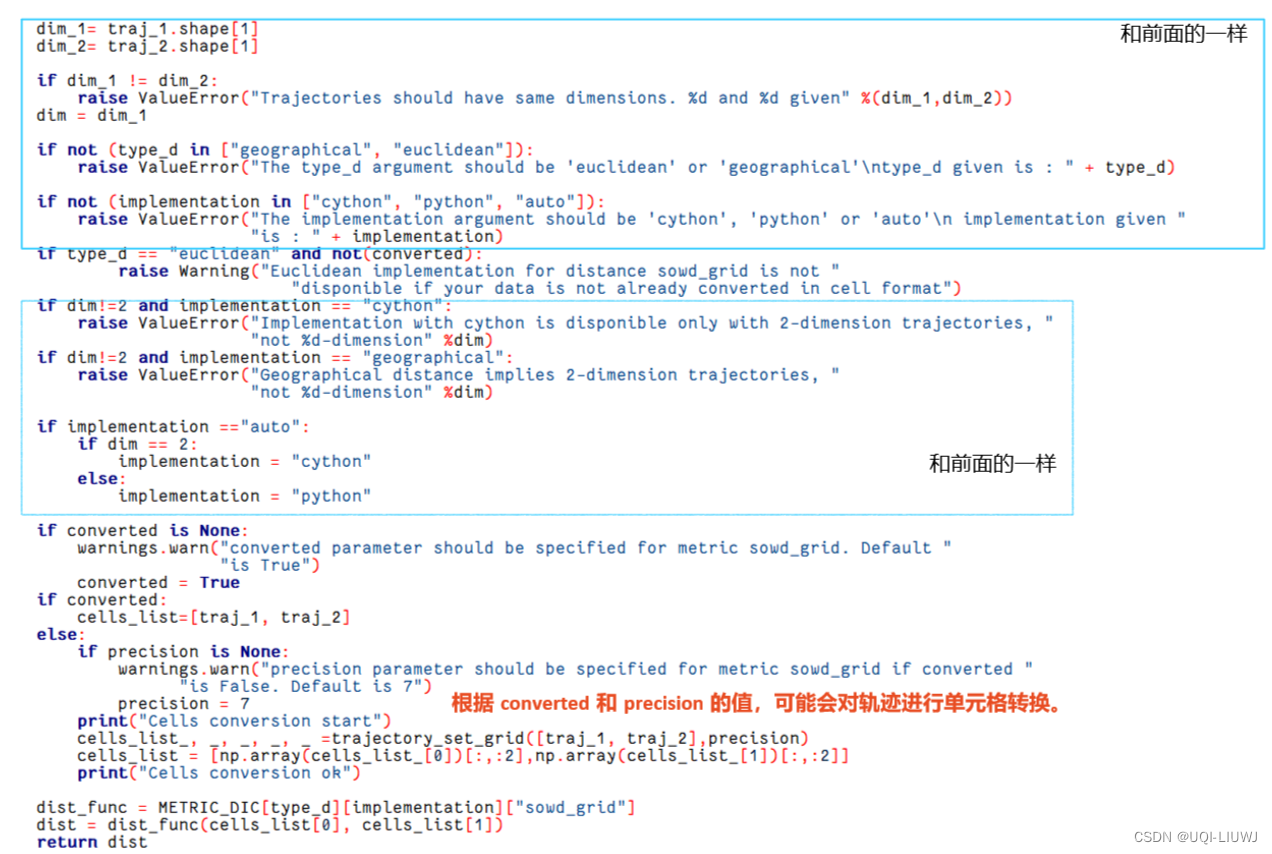
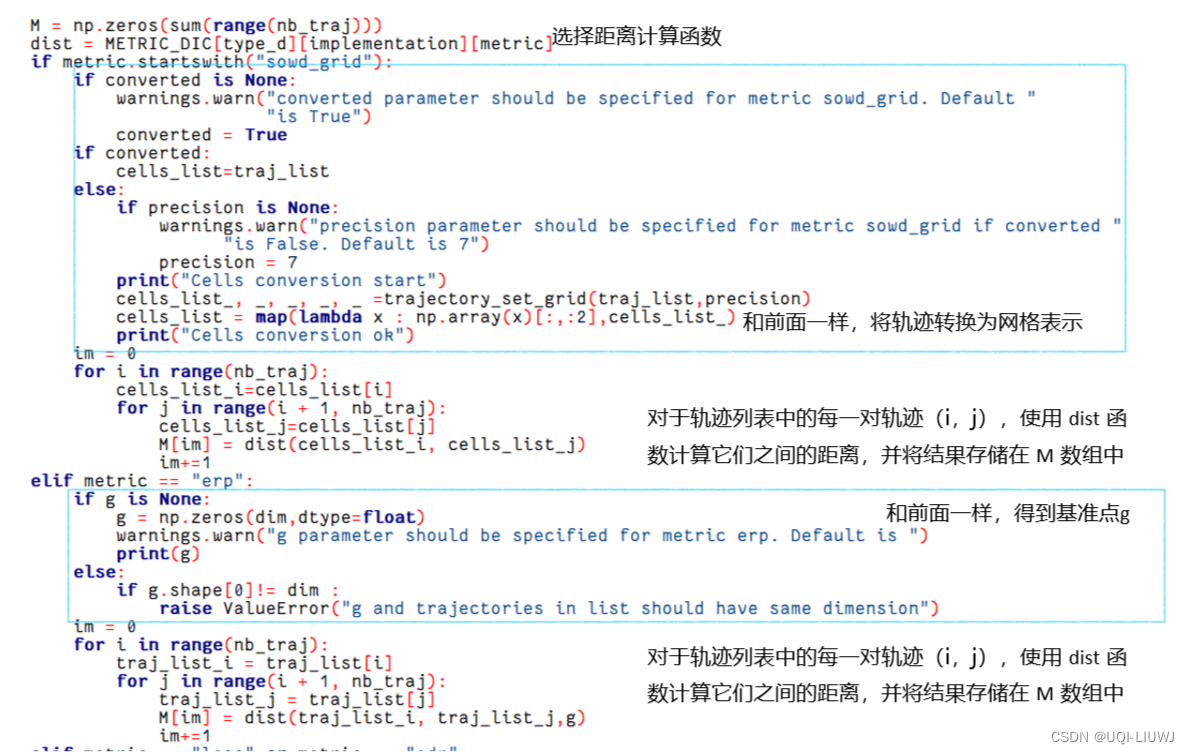
 1.3 sowd_grid
1.3 sowd_grid
两个轨迹之间的对称化单向距离(Symmetrized One-Way Distance)
大体逻辑和1.2 相同,这边多了两个内容
converted:布尔值,如果为 True,则表示轨迹已经转换为网格表示形式precision:Geohash 精度,用于地理坐标的转换。- 'sowd_grid' 计算网格表示中轨迹之间的距离。
- 如果坐标是地理的,可以根据 geohash 编码进行转换。如果是这样,需要 geohash 的“精度”。
- 否则,轨迹被认为是以单元格表示编码的。
1.4 frechet
1.5 discret_frechet
1.6 hausdorff
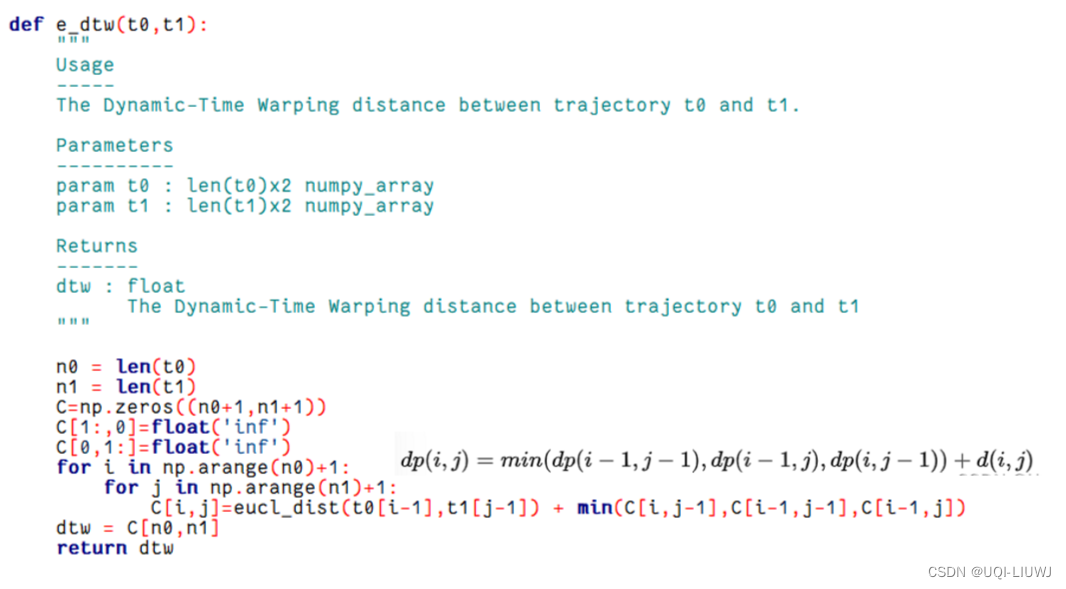
1.7 dtw
逻辑和sspd一样(1.2节),略过
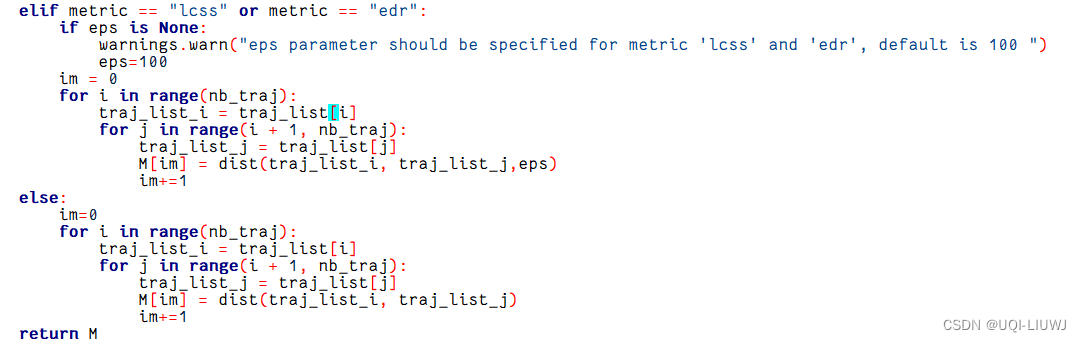
1.8 lcss
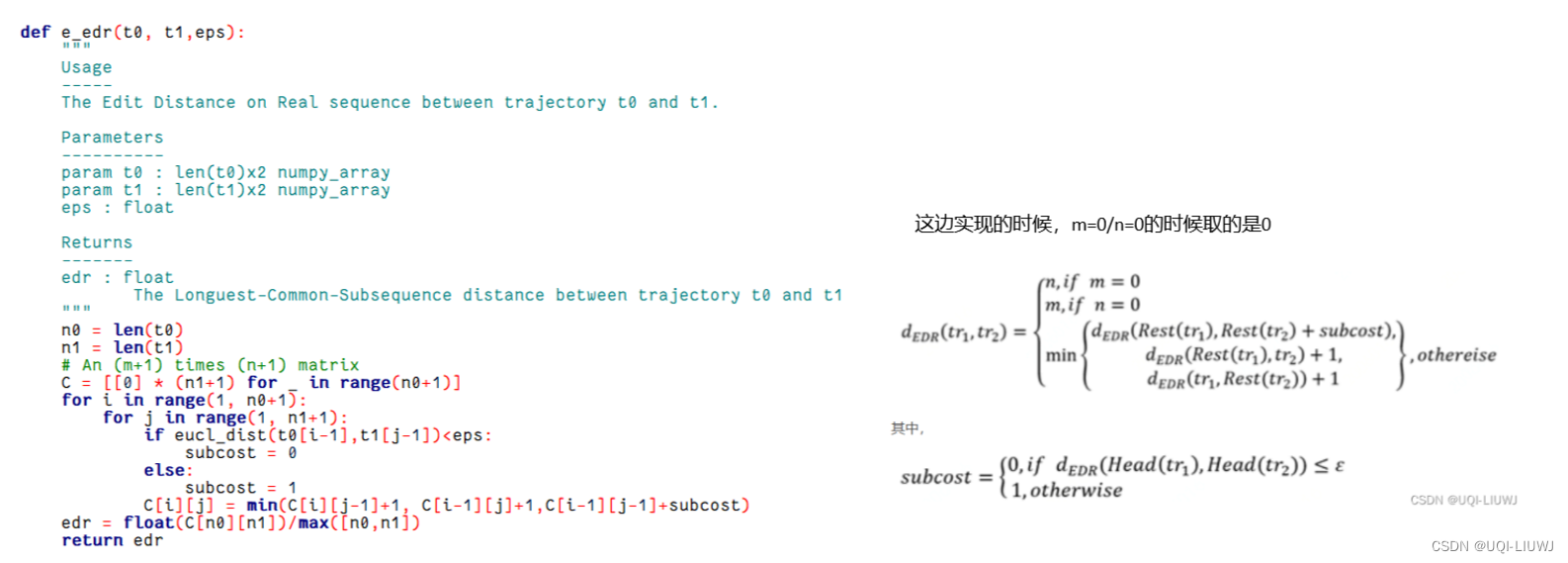
1.9 edr
逻辑和sspd一样(1.2节),只是多了一个eps(阈值),略过
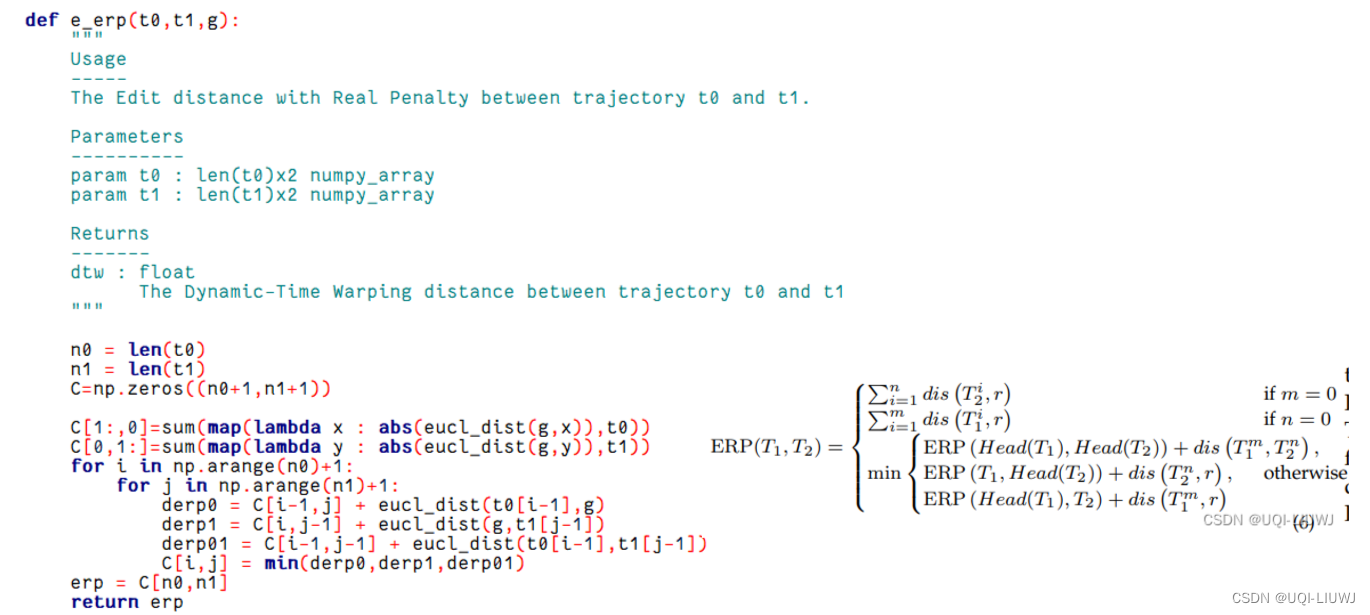
1.10 erp
逻辑和sspd一样(1.2节),只是多了一个g(比较基准点),略过
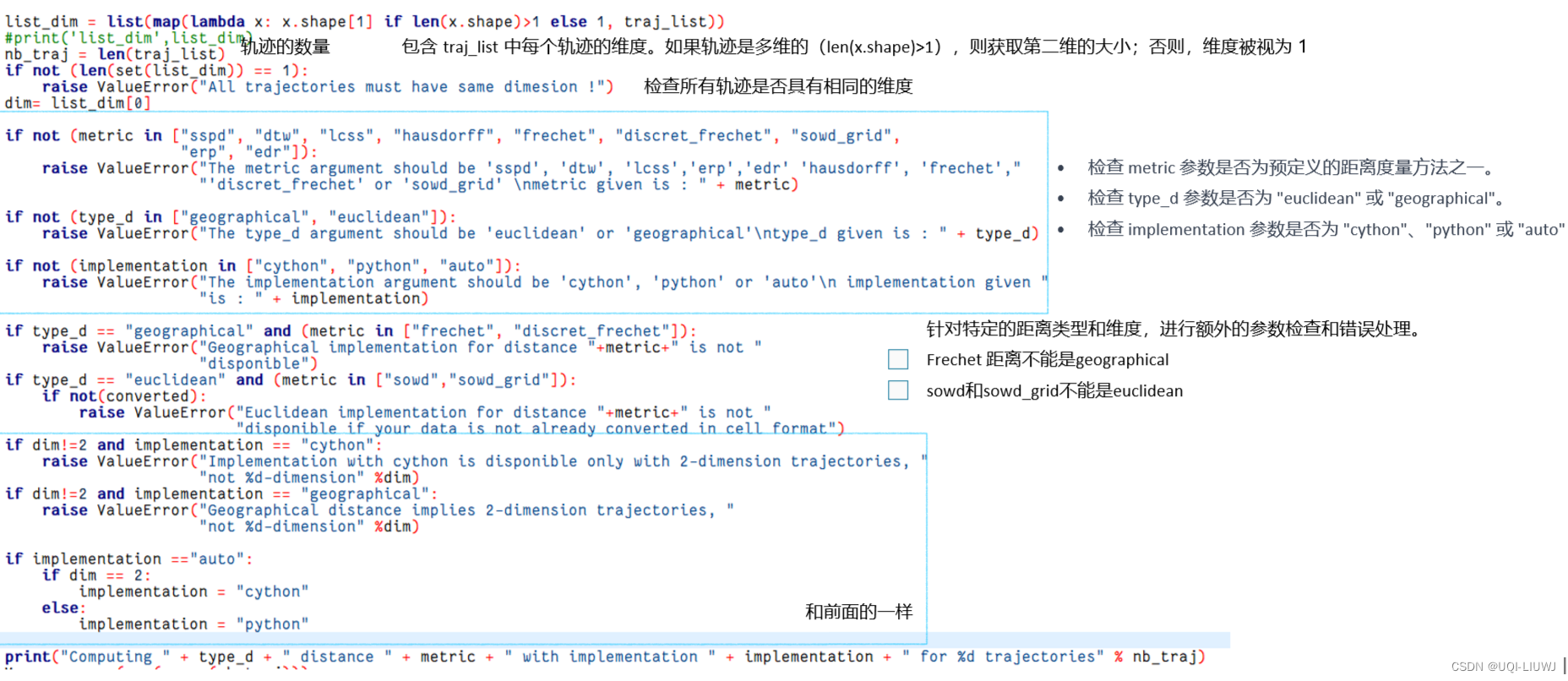
1.11 pdist
用于计算轨迹列表(traj_list)中每对轨迹之间的成对距离
1.12 cdist
用于计算两个轨迹列表(traj_list_1 和 traj_list_2)中每对轨迹之间的距离
实现逻辑和pdist几乎一模一样,唯一的区别就是一个返回的是一维向量,一个是二维数组

2 pdist/basic_euclidean.py 欧氏距离轨迹相关基本操作
2.1 eucl_dist(x,y) 两个坐标点的差的二范数
简单的两个坐标点的差的二范数
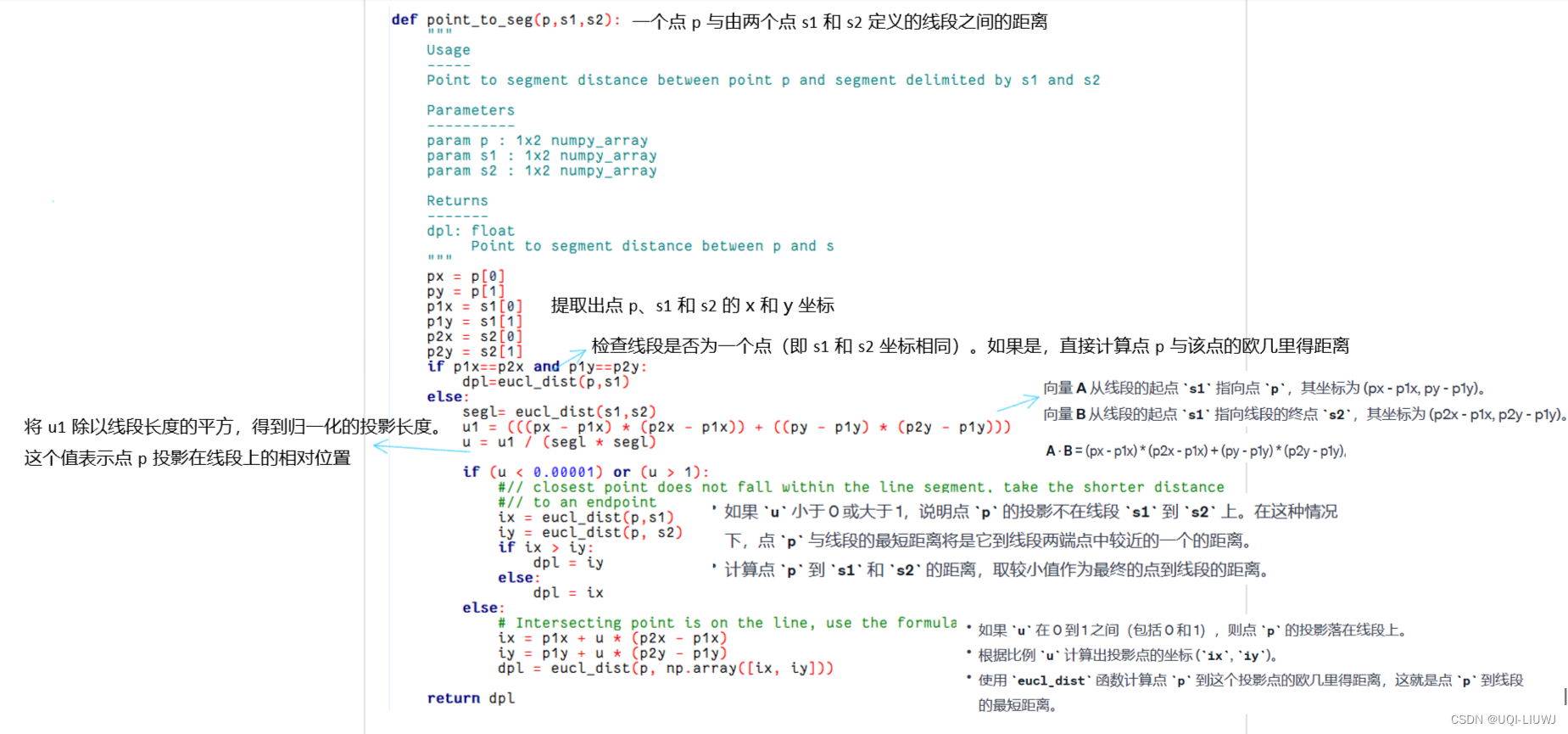
2.2 point_to_seg 点到线段的距离
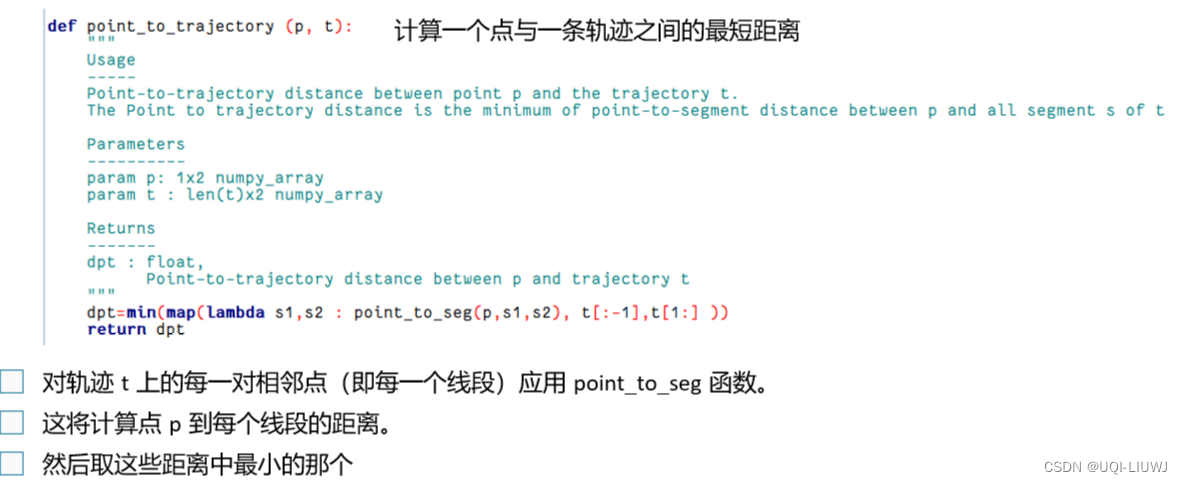
2.3 point_to_trajectory 一个点与一条轨迹的最短距离
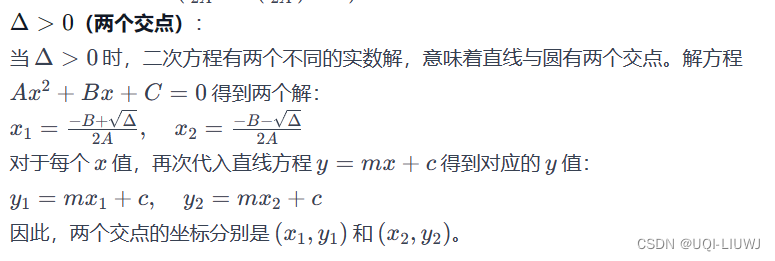
2.4 circle_line_intersection 圆和线段的交点
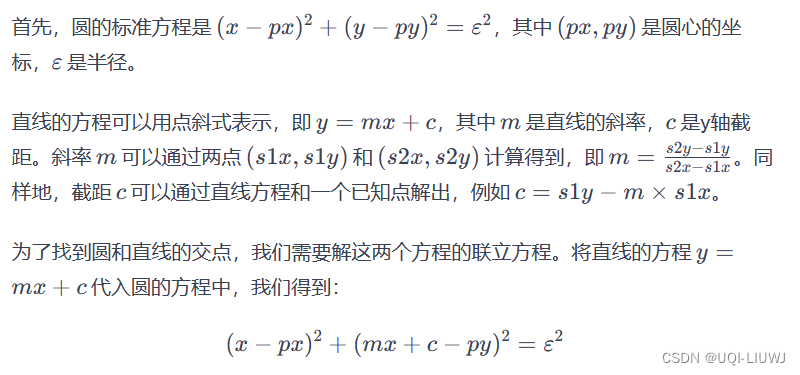
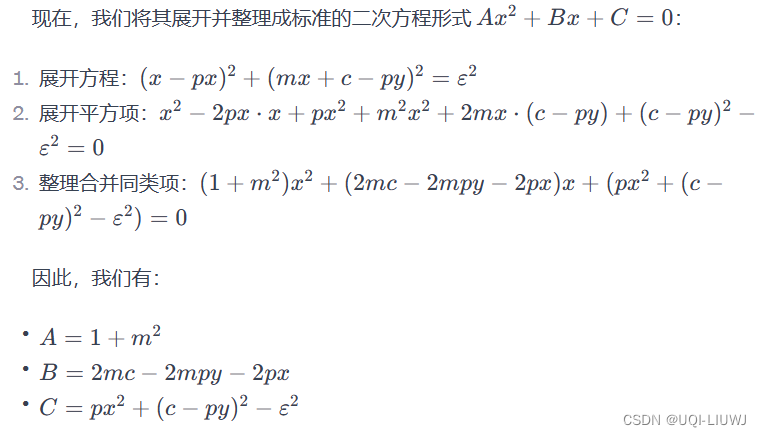
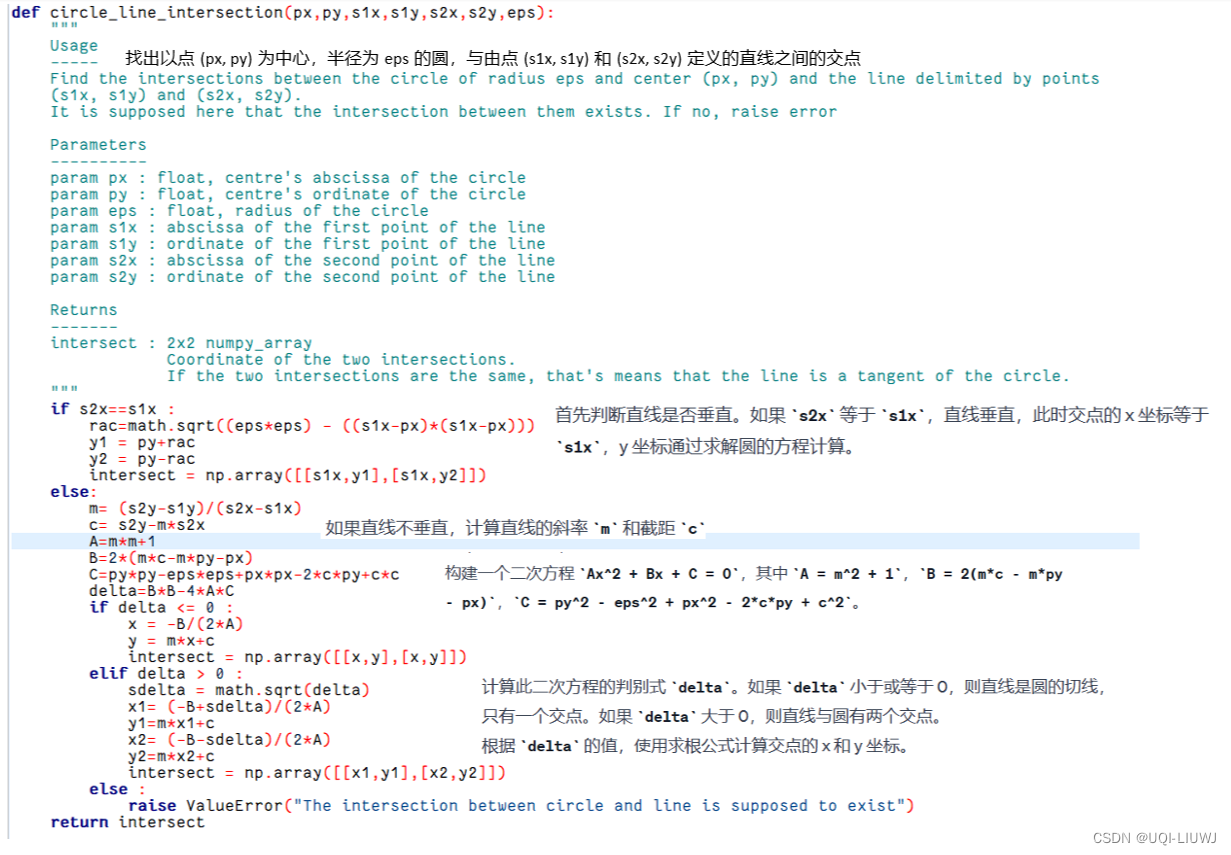 2.4.1 二次方程的推导
2.4.1 二次方程的推导
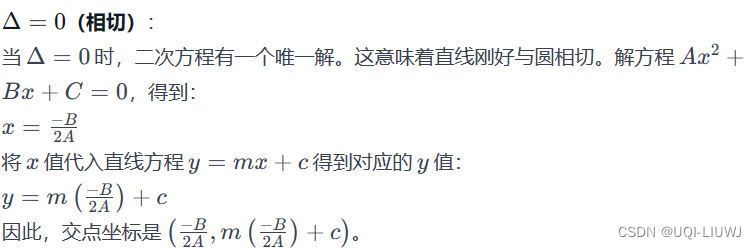
2.4.2 推导坐标
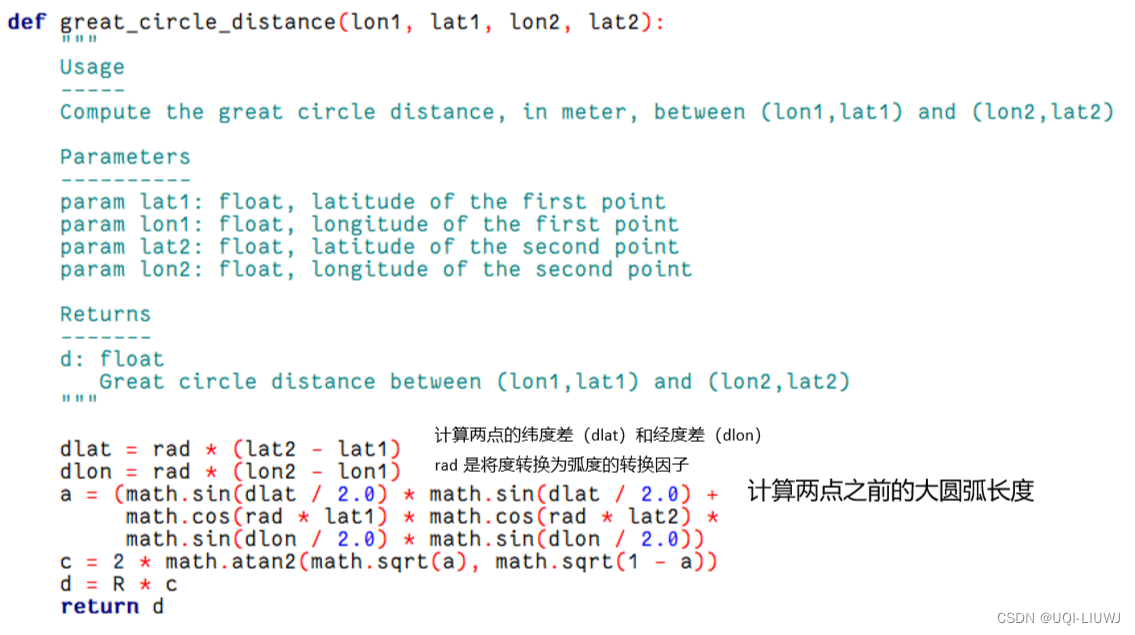
3 basic_geographical.py 地理空间相关的操作
3.1 great_circle_distance 两个经纬度的大圆距离
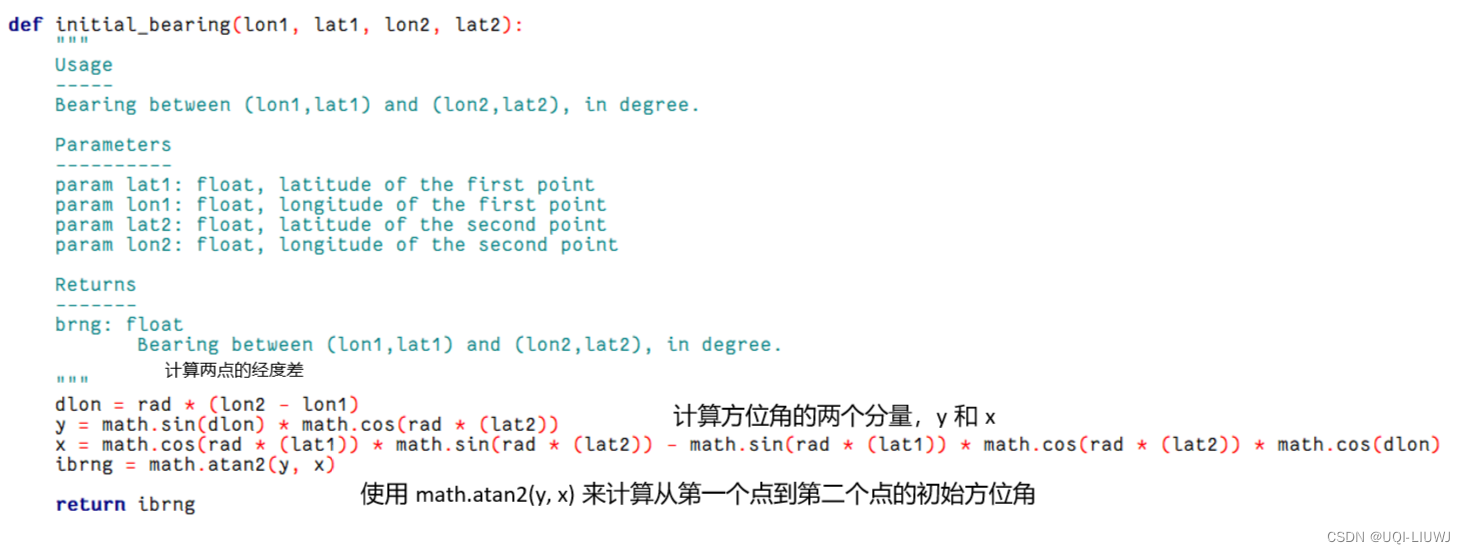
3.2 initial_bearing 一个点到另一个点的初始方位角
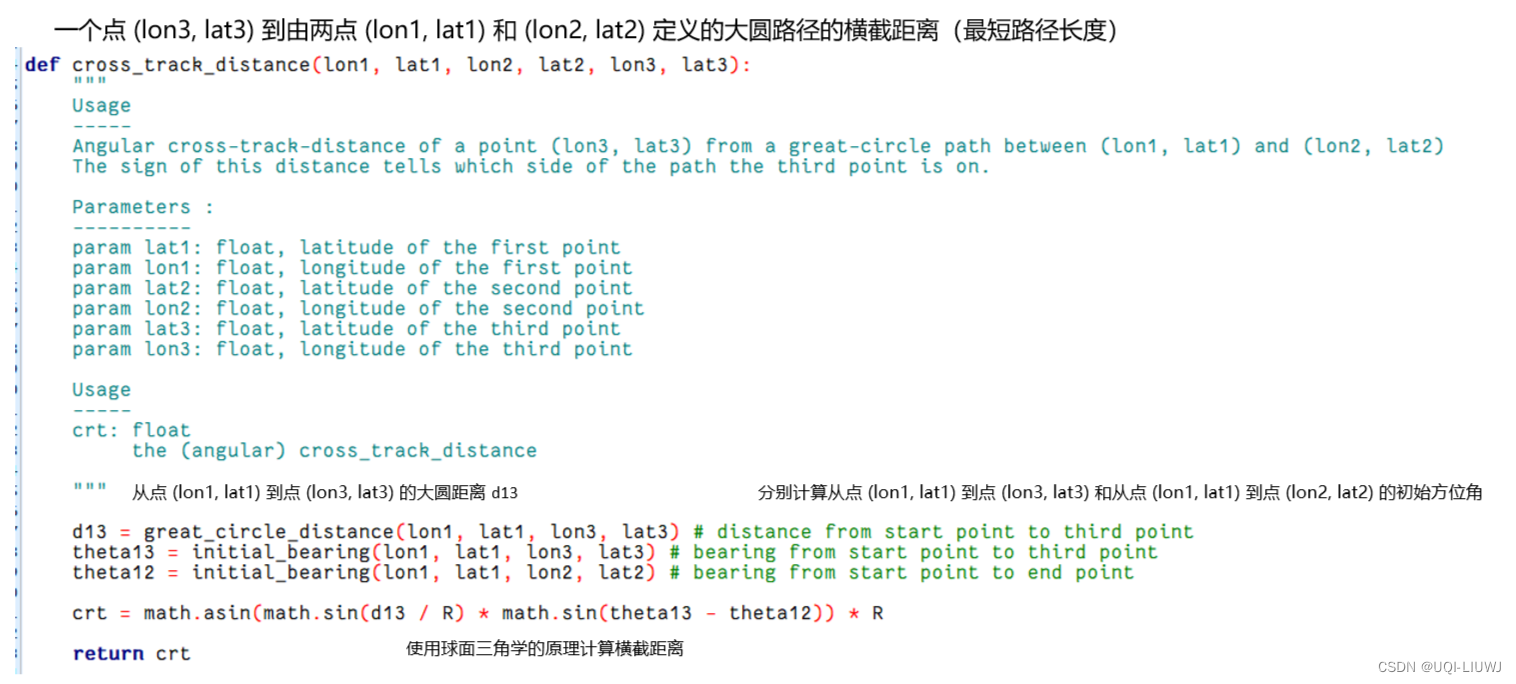
3.3 cross_track_distance 点到大圆路径的距离
3.4 along_track_distance 从轨迹上点到不在轨迹上点的沿轨迹距离

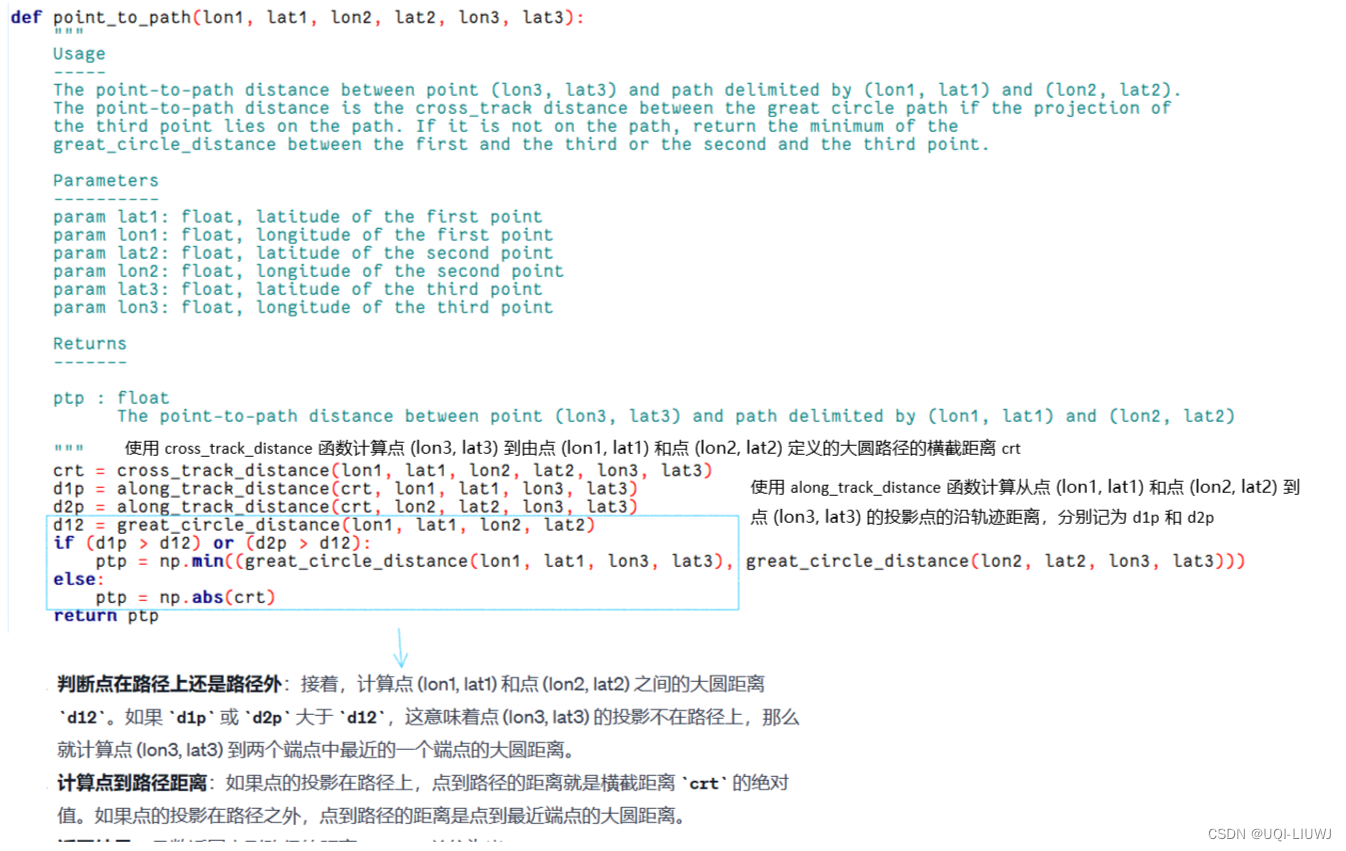
3.5 point_to_path 一个点 到一条由两点 和 定义的路径的点到路径距离
4 pdist/sspd.py 一条轨迹上的点到零一条轨迹的距离
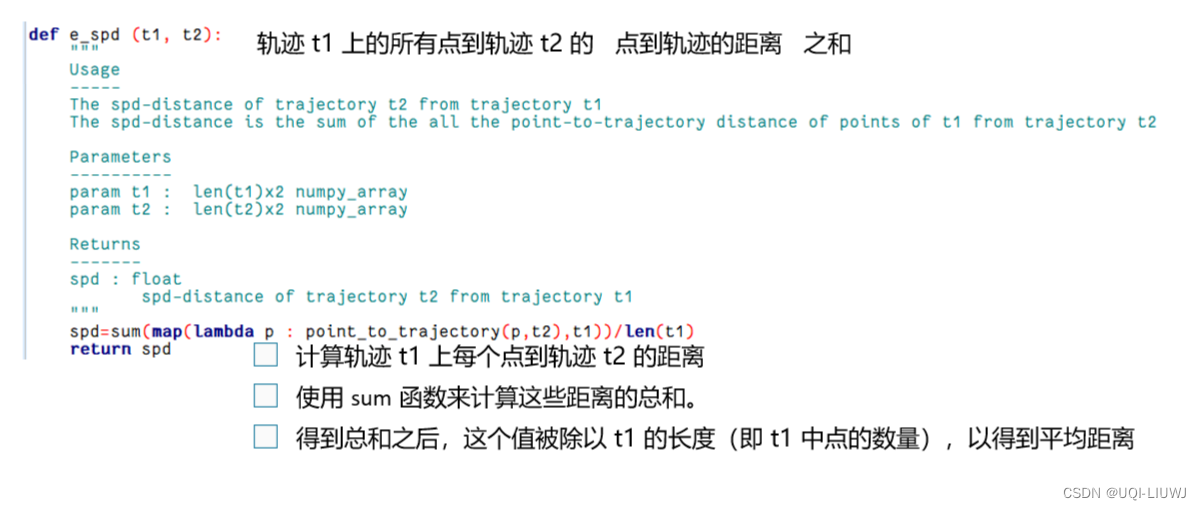
4.1 e_spd 轨迹 t1 上的所有点到轨迹 t2 的 点到轨迹的距离
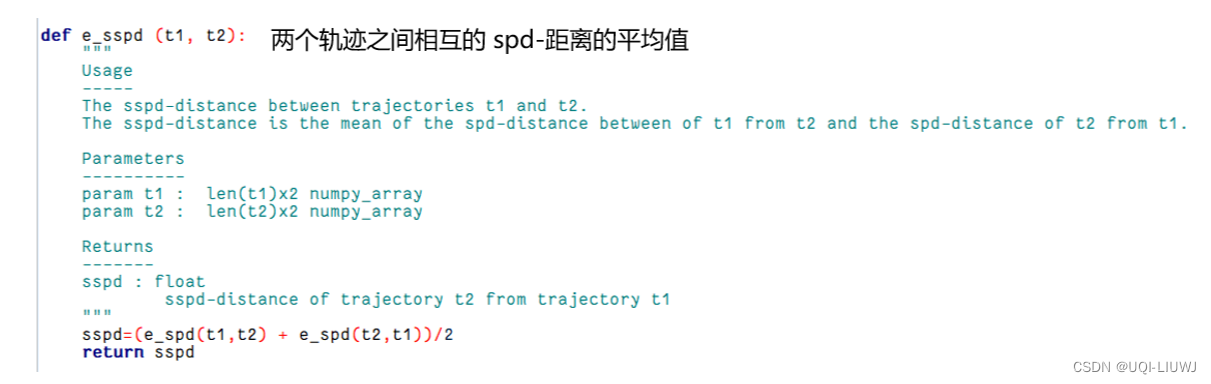
4.2 e_sspd 两个轨迹之间相互的 spd-距离的平均值
 4.3 g_spd 轨迹 t1 上所有点到轨迹 t2 的 平均点到路径距离(?)
4.3 g_spd 轨迹 t1 上所有点到轨迹 t2 的 平均点到路径距离(?)
这里代码的注释是轨迹 t1 上所有点到轨迹 t2 的 平均点到路径距离,我觉得应该是t2到t1?

4.4 g_sspd 两个轨迹之间相互的 spd-距离的和
注:和欧几里得的版本不同,几何空间版本是求和,而不是取平均
5 pdist/lcss.py 最长公共子序列
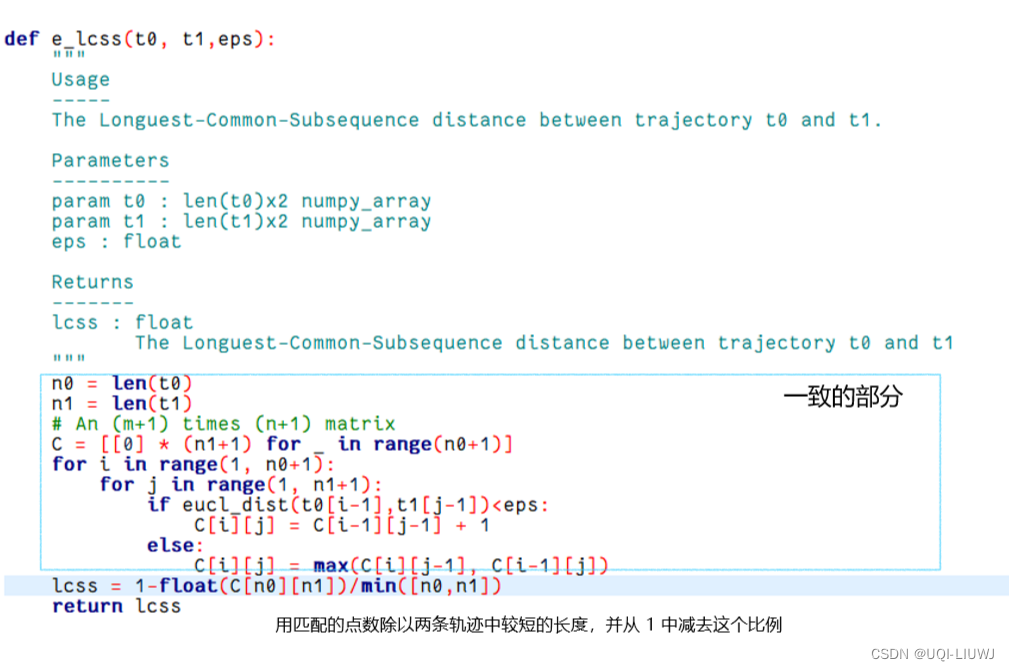
5.1 e_lcss
大体上和文巾解题1143. 最长公共子序列-CSDN博客是一样的,仅有一点点区别
5.2 g_lcss
基本上都是一样的,把计算欧几里得距离换成了计算大圆距离
6 pdist/hausdorff.py 豪斯多夫距离
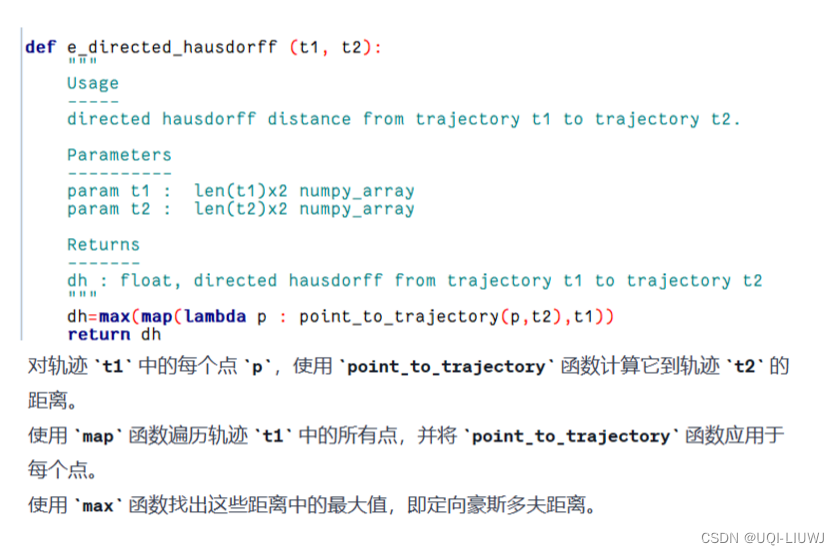
6.1 e_directed_hausdorff t1到t2的豪斯多夫距离
6.2 e_hausdorff 双向豪斯多夫
t1到t2和t2到t1的单向豪斯多夫距离中较大的那个
6.3 g_directed_hausdorff
6.4 g_hausdorff
和欧氏距离的唯一区别是,point_to_trajectory改成了point_to_path
7 pdist/erp.py
地理坐标类的就是将欧氏距离改成大圆距离
8 pdist/edr.py
















 1037
1037

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











