







 超级会员免费看
超级会员免费看
目录
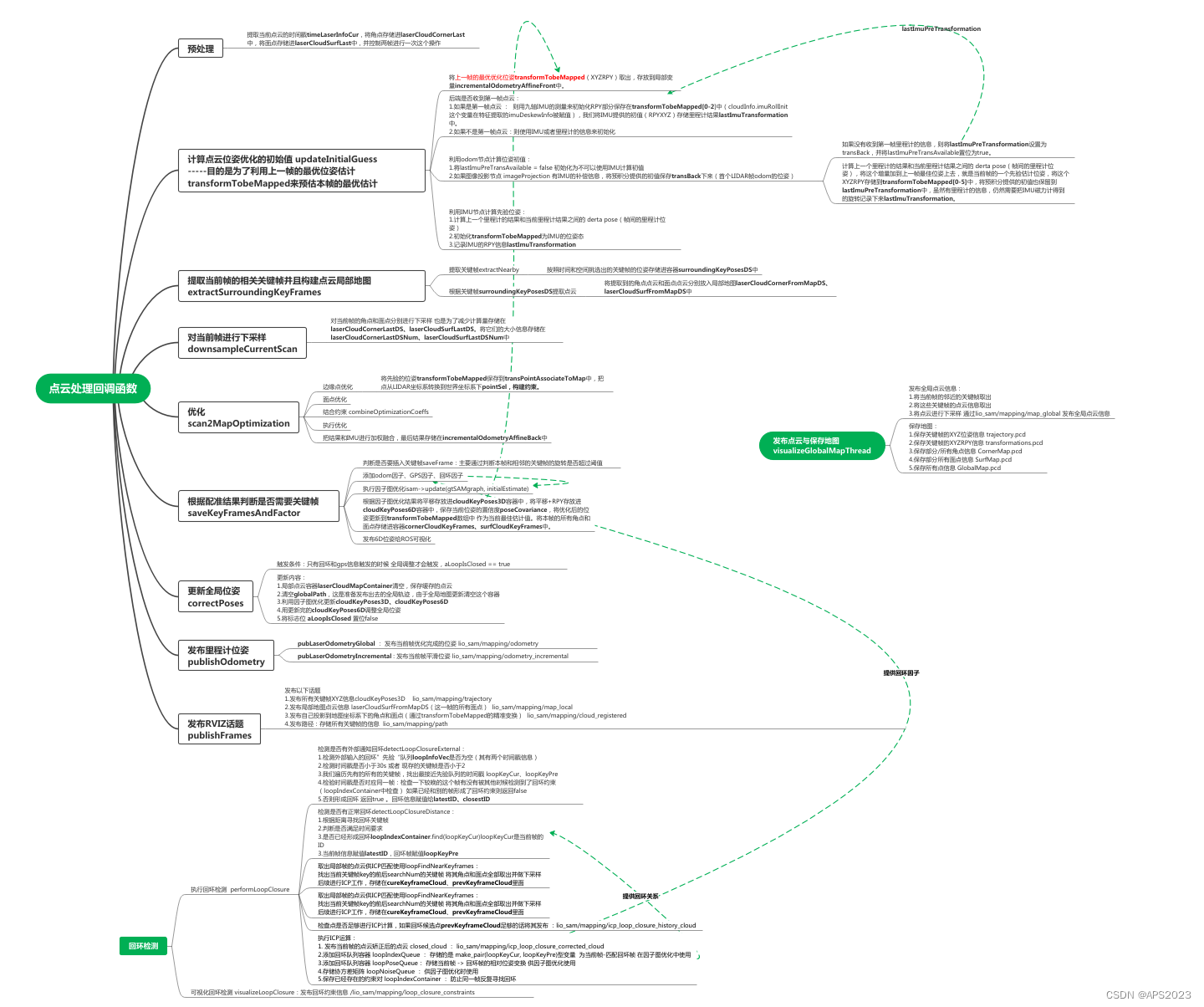
0 流程图
1 发布全局地图 publishGlobalMap
int main(int argc, char** argv) { ros::init(argc, argv, "lio_sam"); mapOptimization MO; ROS_INFO("\033[1;32m----> Map Optimization Started.\033[0m"); // 回环检测线程 std::thread loopthread(&mapOptimization::loopClosureThread, &MO); // RVIZ可视化 std::thread visualizeMapThread(&mapOptimization::visualizeGlobalMapThread, &MO); ros::spin(); loopthread.join(); visualizeMapThread.join(); return 0; }在main函数中,我们进入visualizeMapThread线程,进入线程主函数visualizeGloba

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 174
174











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











