







| 踩坑1 |
|---|
cmake分析EAO-SLAM源代码时一直报错。
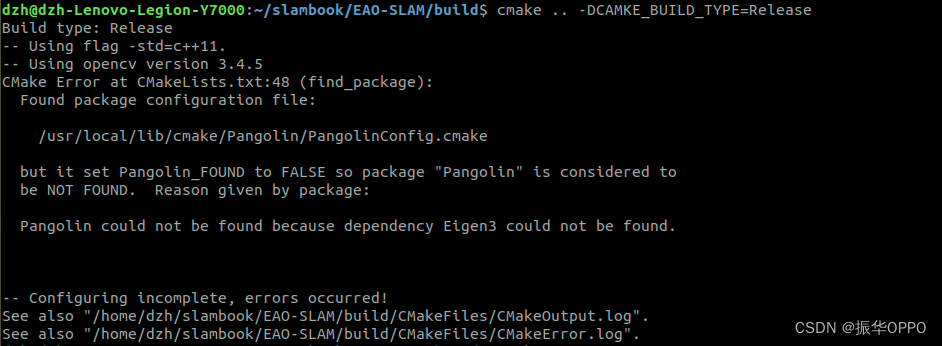
参考我的这篇重装pangolin0.5版本的博客
| 踩坑2 |
|---|
make编译EAO-SLAM源代码时会在60%时候报error停止,但是并没有任何信息告诉你哪里错了。
尝试搜索了很久也无果,偶然的一次运行,在10%就停止了,我看见了那个爆红的error:
error: ‘iota’ is not a member of ‘std’
原来是缺少头文件#include <numeric>,然后加上即可编译成功。

| 踩坑3 |
|---|
一定要是下面的命令格式,我因为cd到mono_tum所在目录运行一直卡住,就是因为必须得在根目录中运行。
./Examples/Monocular/mono_tum LineAndiForest ./Examples/Monocular/freiburg3_long_office_household/
| 踩坑4 |
|---|
运行EAO-SLAM时,updating model 段错误 (核心已转储)
ORB-SLAM2 Copyright (C) 2014-2016 Raul Mur-Artal, University of Zaragoza.
This program comes with ABSOLUTELY NO WARRANTY;
This is free software, and you are welcome to redistribute it
under certain conditions. See LICENSE.txt.
-------
Start processing sequence ...
Images in the sequence: 405
updating model
段错误 (核心已转储)
这里我直接在EAO-SLAM主页找到了作者的回答。
就是ThirdParty以及本身的CMakeLists.txt都删掉-march=native,然后重新编译安装。

| 成功 |
|---|
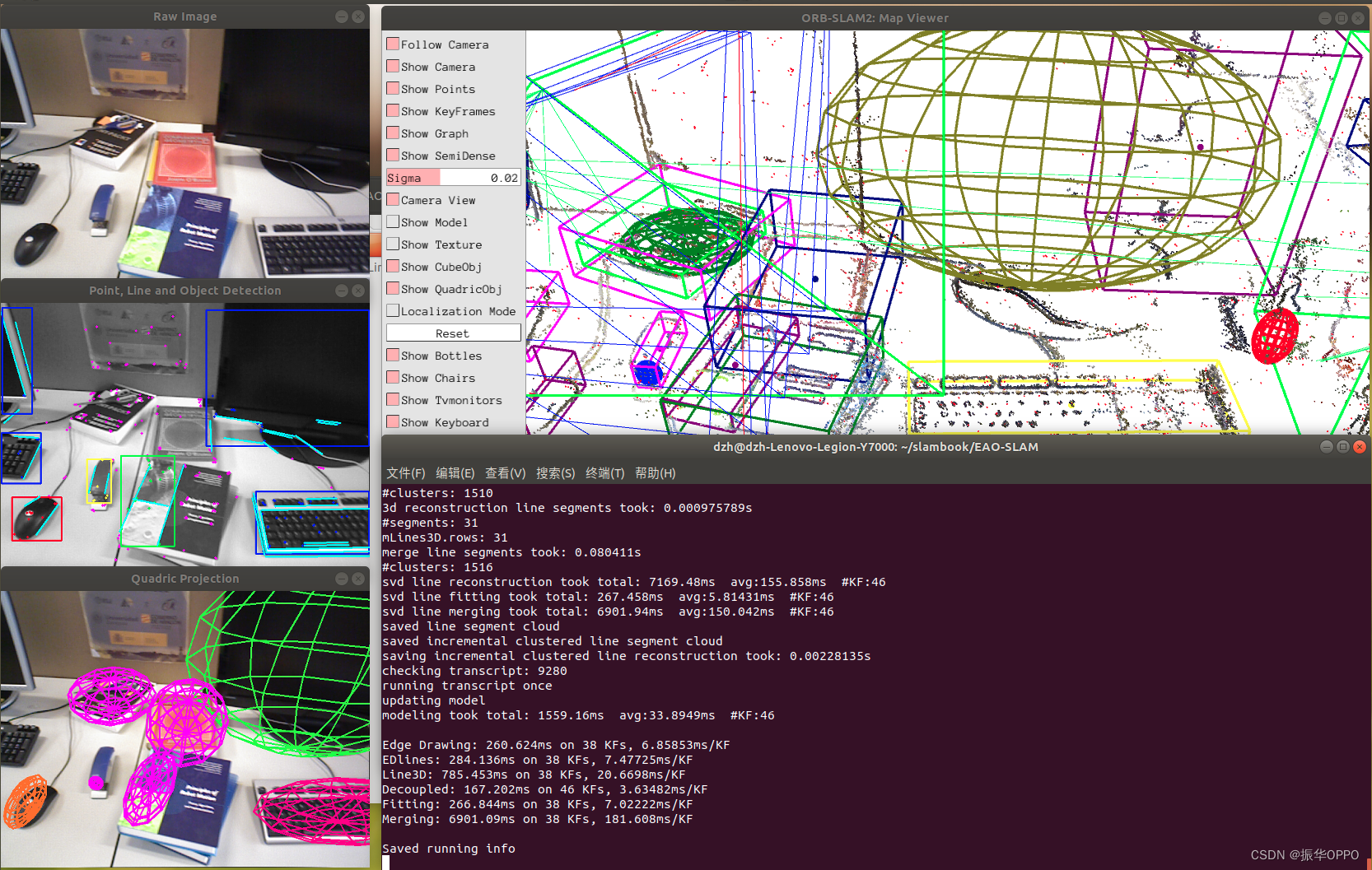
经历了昨晚2h+早上2.5h+下午2.5h(太菜了),终于成功部署运行了EAO-SLAM!吴艳敏大佬的作品,几何和语义相结合。

初稿完成于2023-01-05 11:18:48,一直未发布
















 2080
2080











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











