






 本文详细介绍了电机控制中的滑模观测器在PMSM无感控制中的应用,包括FOC控制中的电流变换、电流环PI控制、SVPWM技术,以及反电动势观测器BEMF的原理,涉及静止和旋转坐标系转换,最终目标是实现精确的位置信息提取和机械转速计算。
本文详细介绍了电机控制中的滑模观测器在PMSM无感控制中的应用,包括FOC控制中的电流变换、电流环PI控制、SVPWM技术,以及反电动势观测器BEMF的原理,涉及静止和旋转坐标系转换,最终目标是实现精确的位置信息提取和机械转速计算。
【电机控制】滑模观测器PMSM无感控制波形图
文章目录
前言
【电机控制】直流有刷电机、无刷电机汇总——持续更新
使用工具:
1.直流稳压电源:GPS305D(30V/5A)
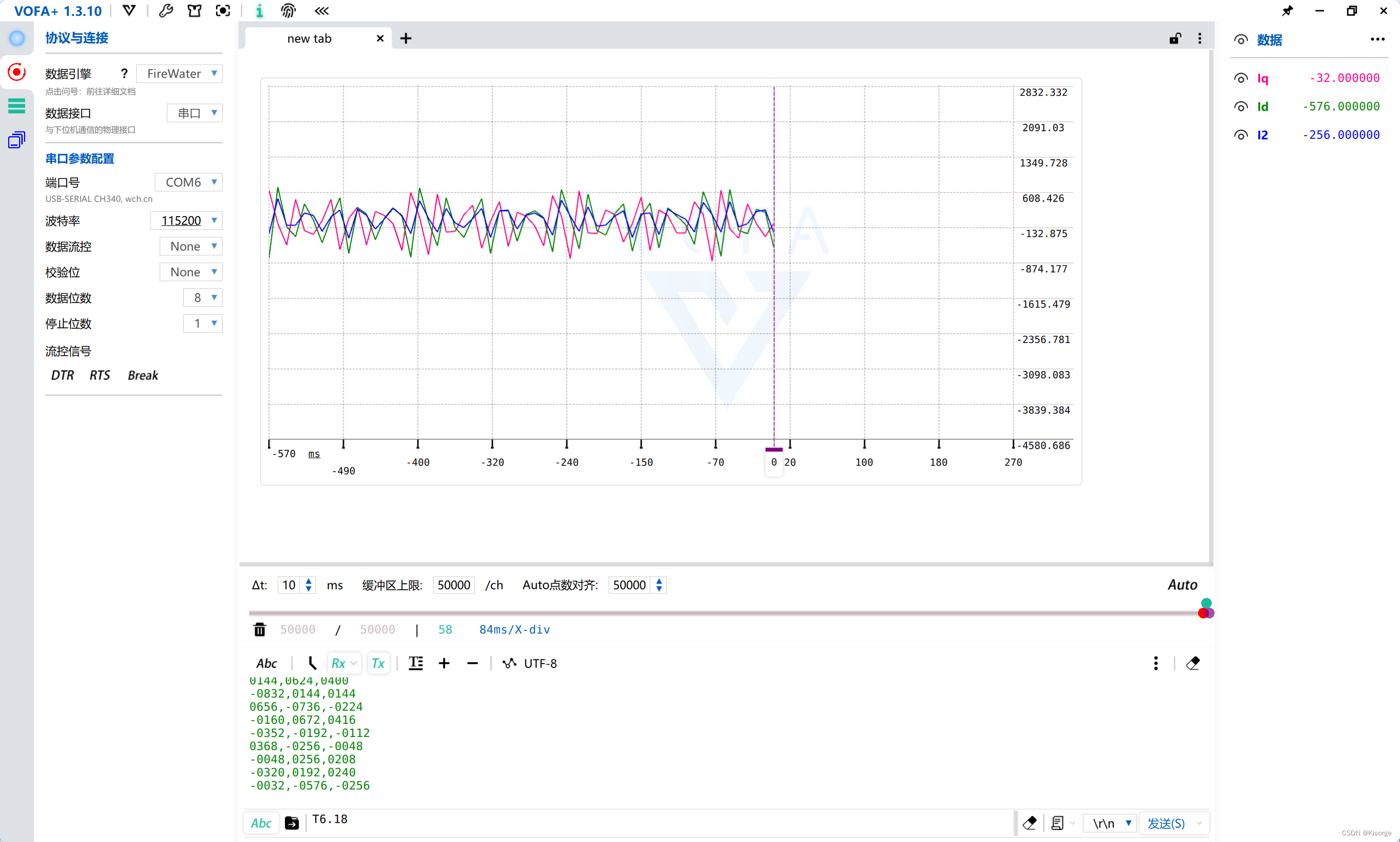
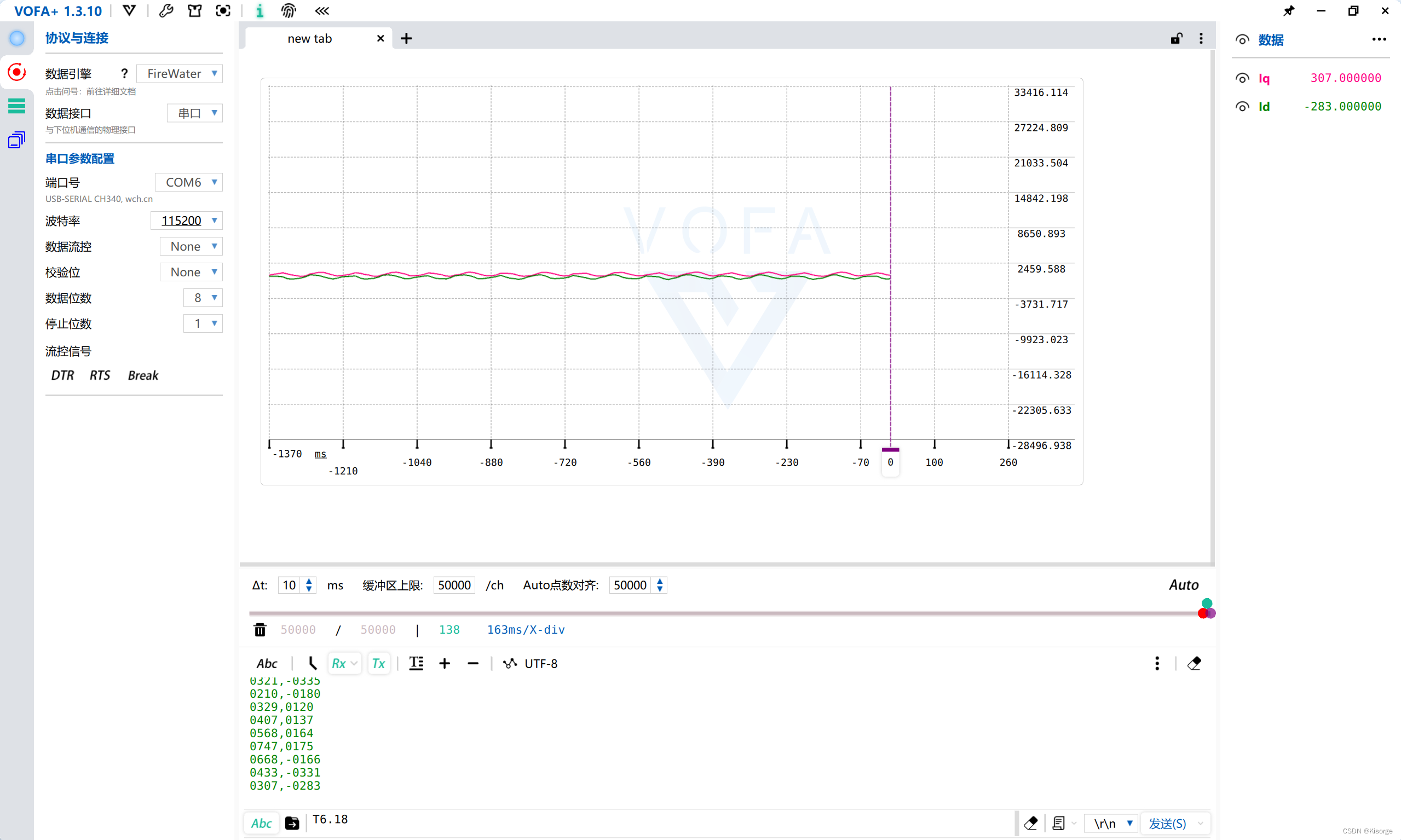
2.上位机:VOFA+
提示:以下是本篇文章正文内容,下面案例可供参考
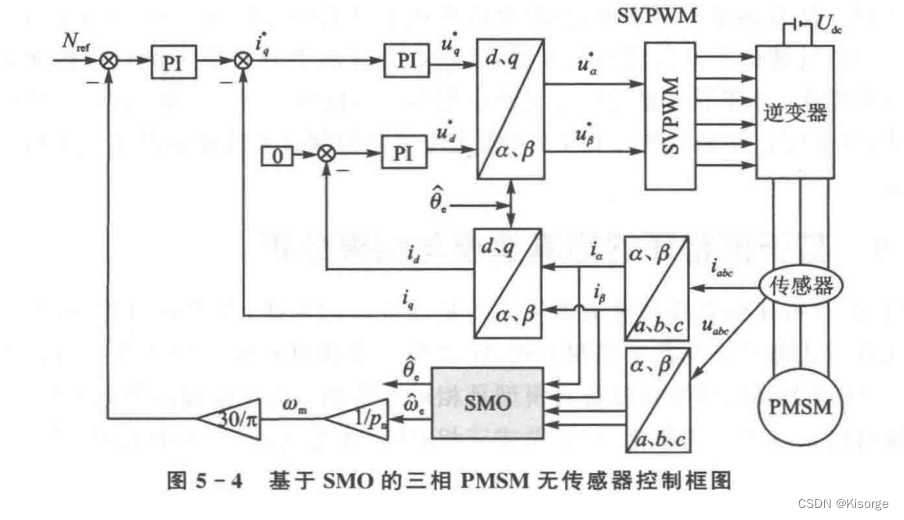
一、FOC控制
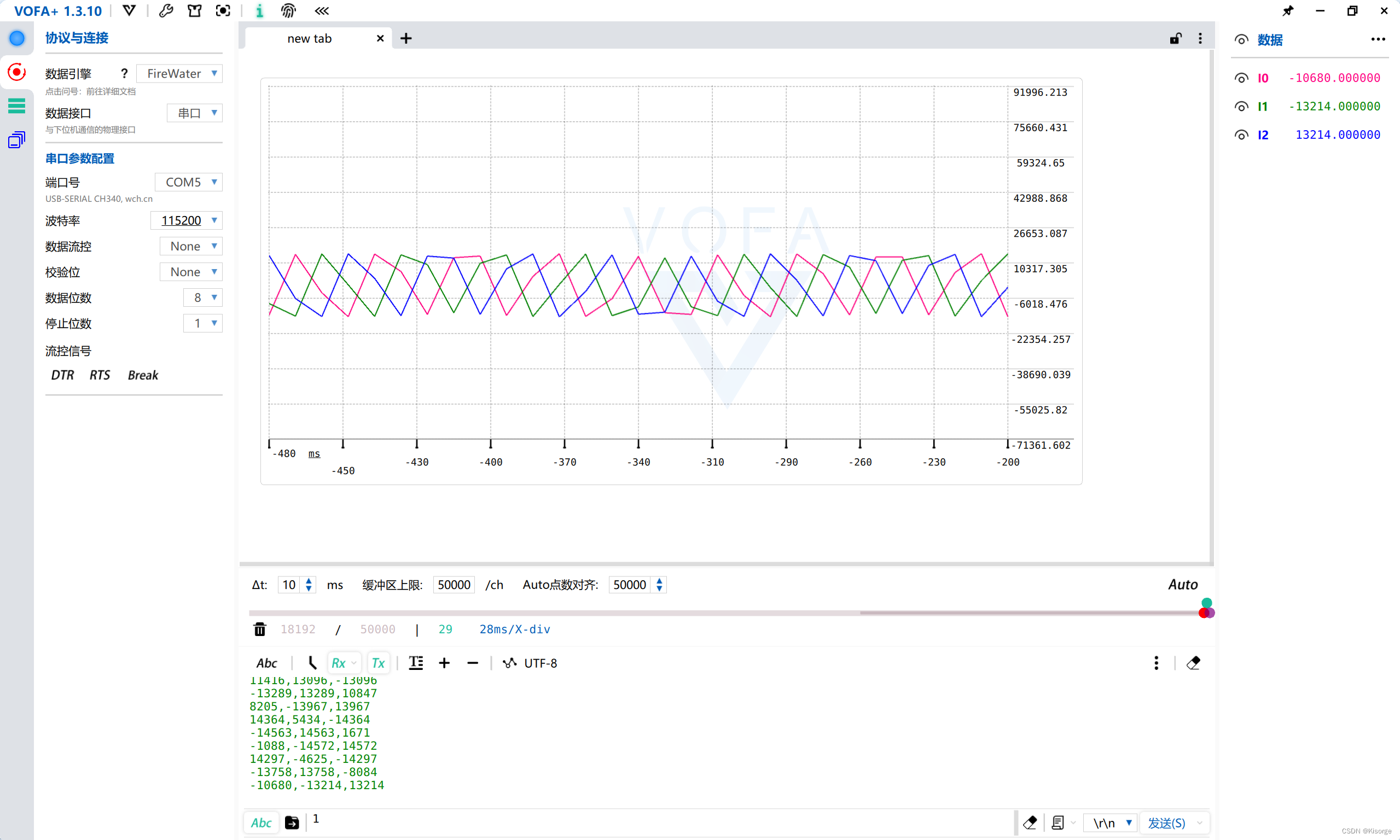
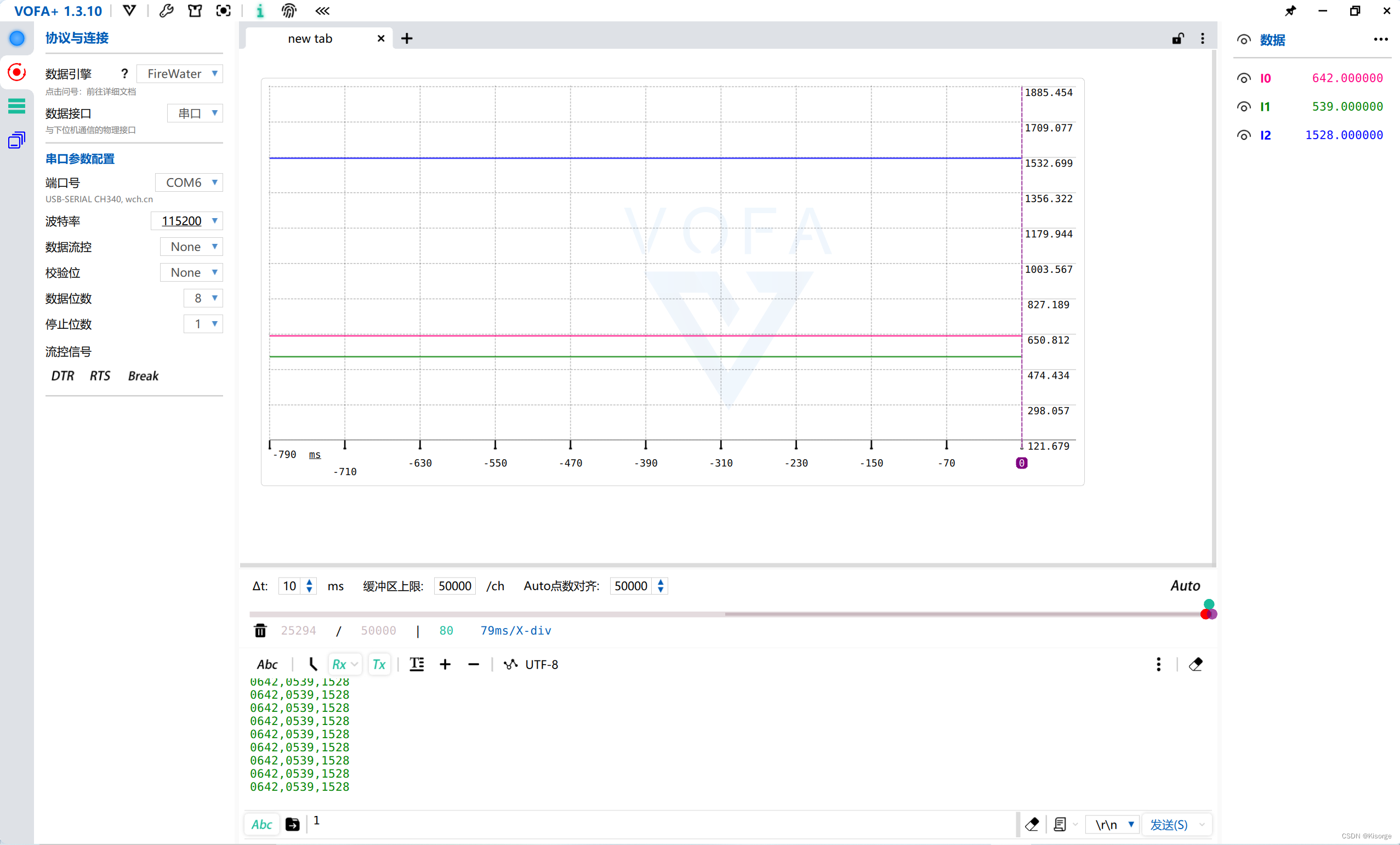
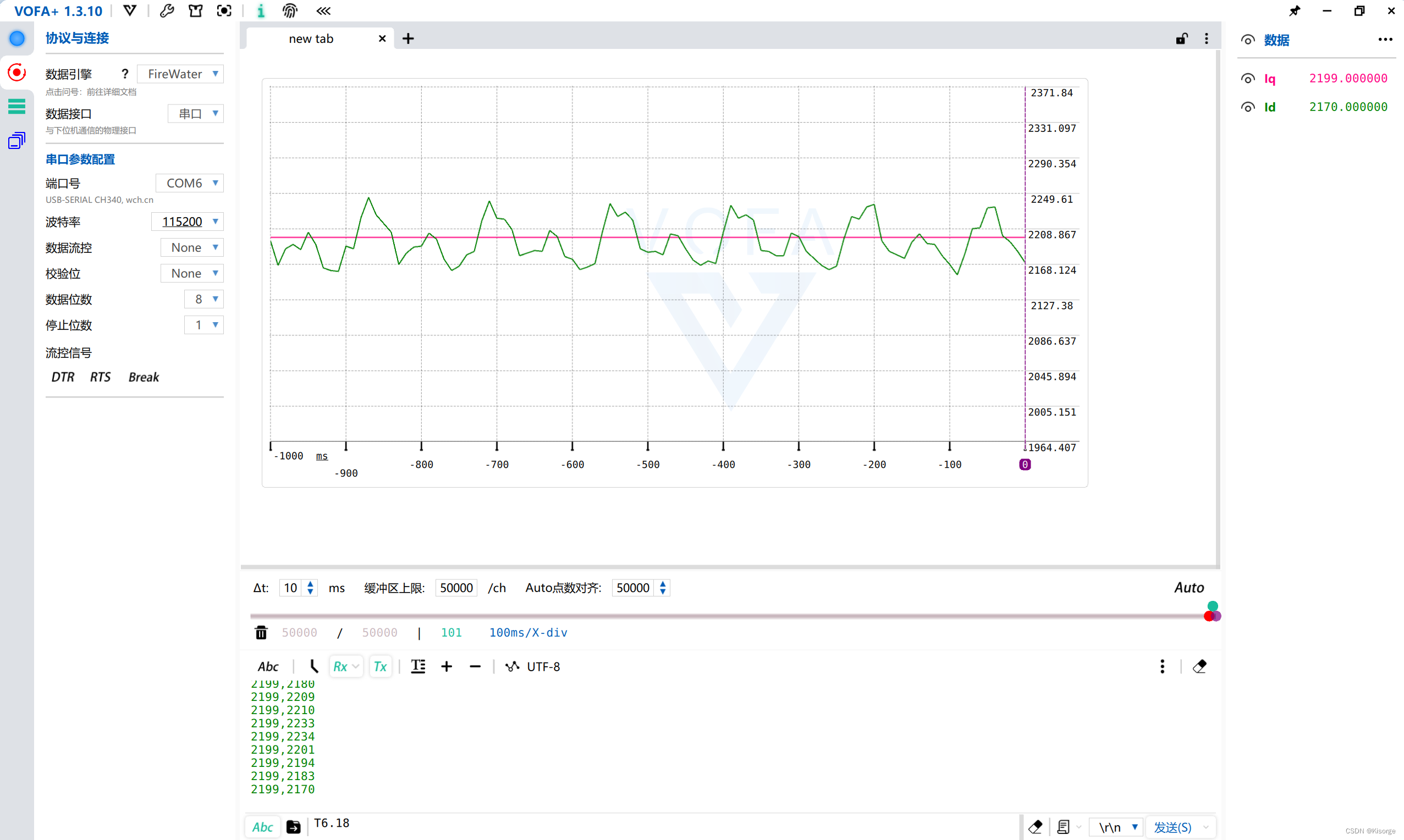
1.三相电流
2.Clark变换静止坐标系iαiβ
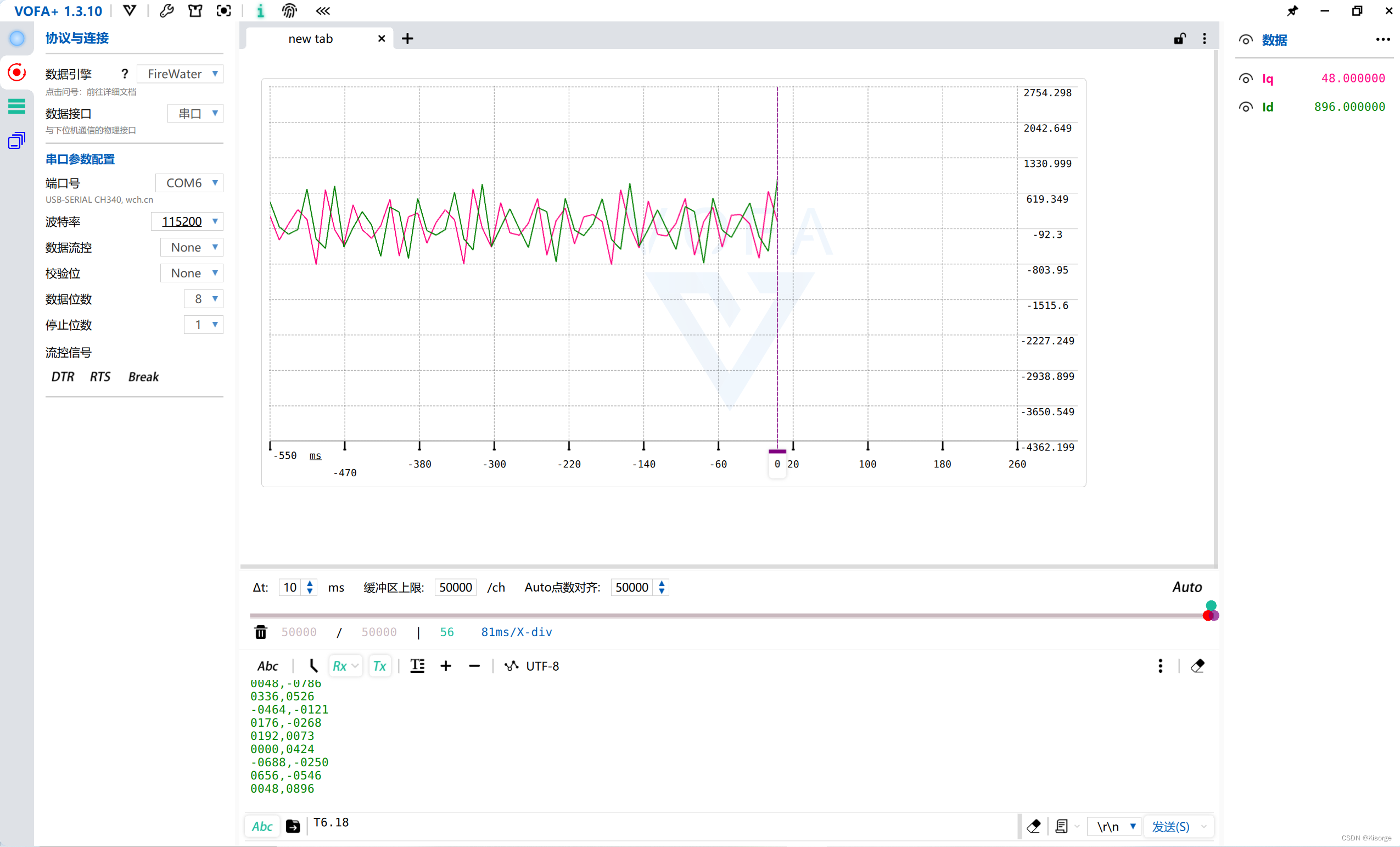
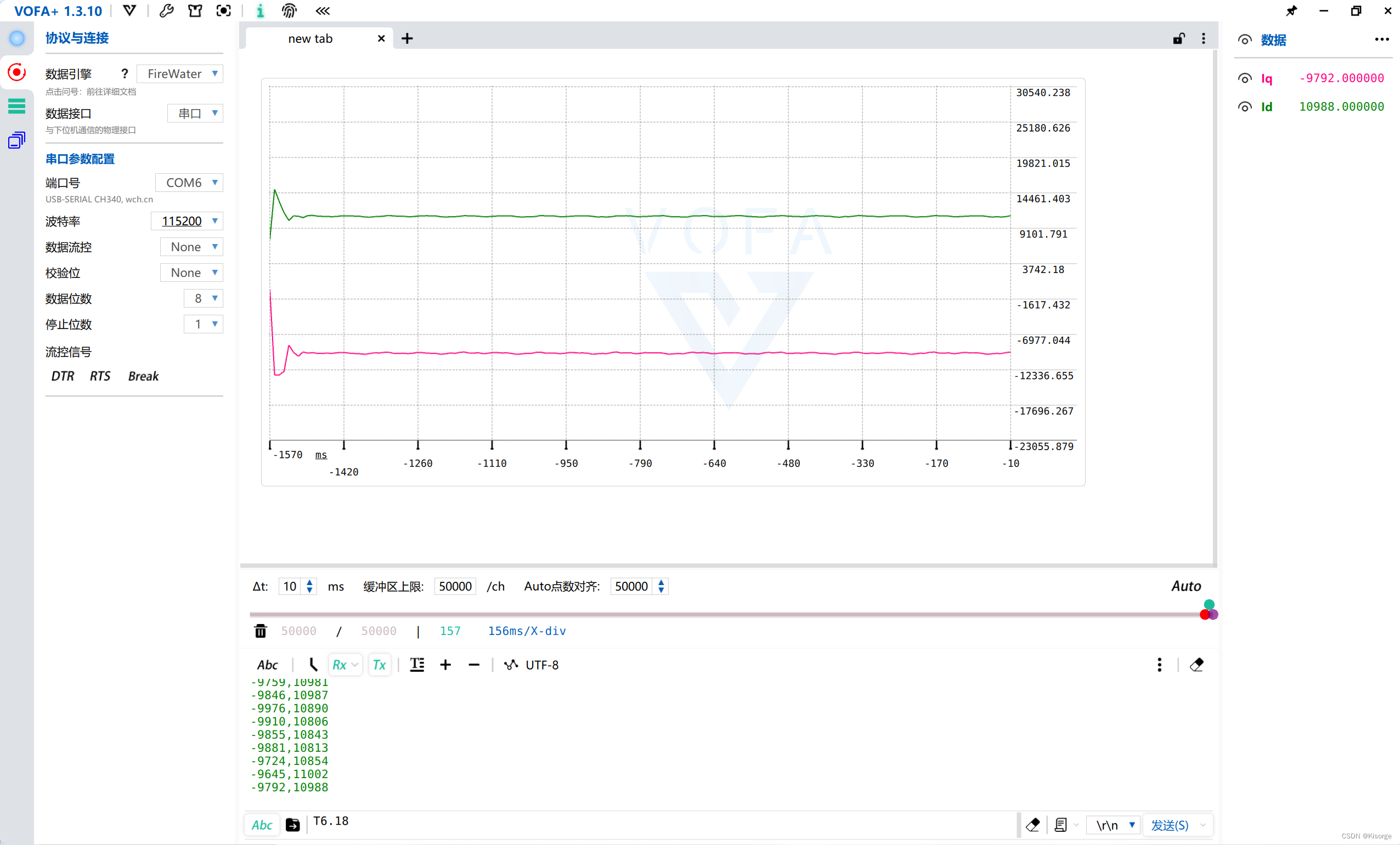
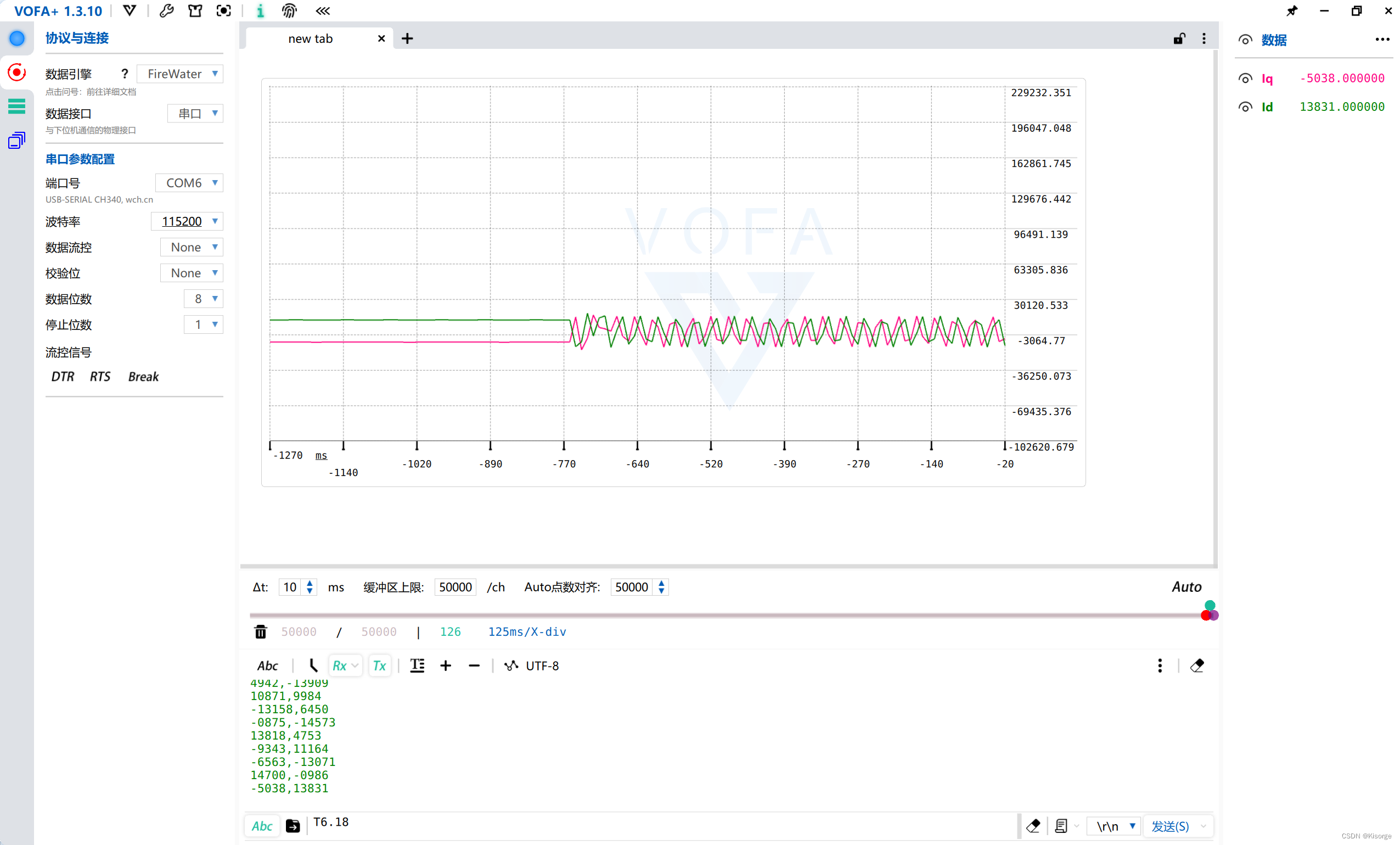
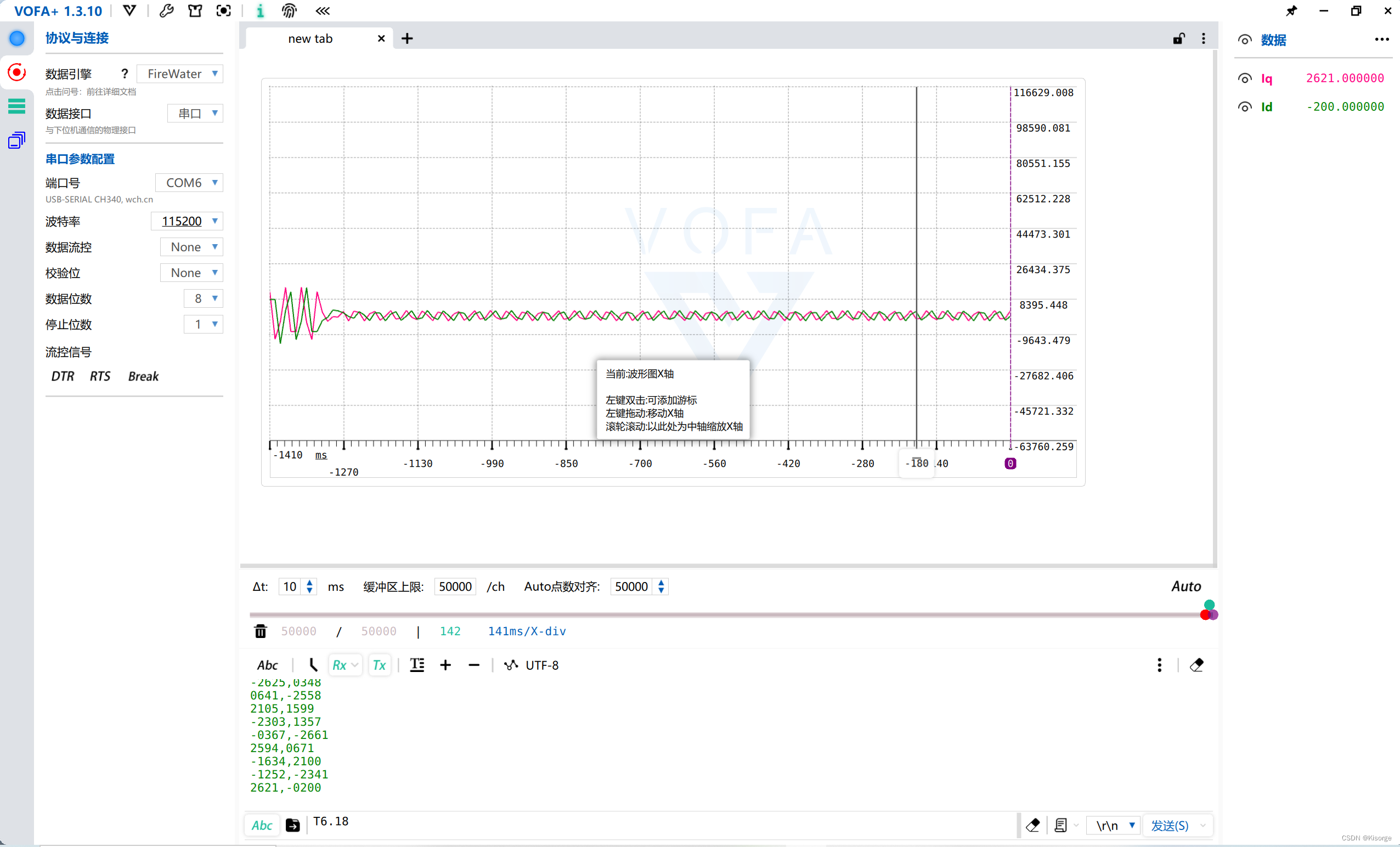
3.park变换旋转坐标系idiq
4.电流环PI控制输出UdUq
5.UdUq 反park变换UαUβ
6.SVPWM
7.三相电流OFFSET
二、反电动势观测器BEMF
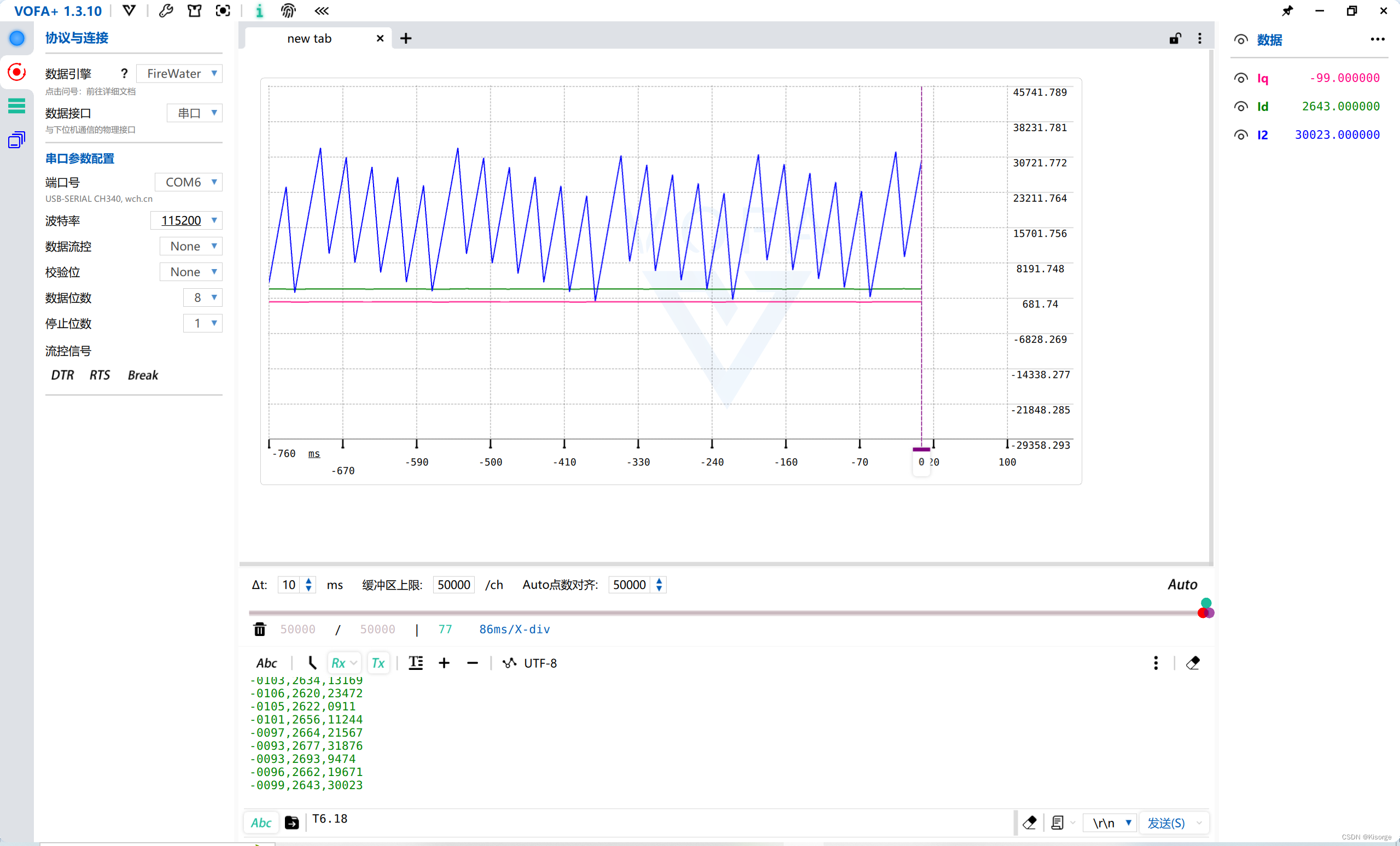
1.静止坐标系iαiβ提取反电动势EaEb
2.反电动势EaEb提取位置信息、EqEd
3.位置信息提取机械转速wr
总结
本文仅仅简单介绍了【电机控制】滑模观测器PMSM无感控制波形图,评论区欢迎讨论。



















 3708
3708

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











