







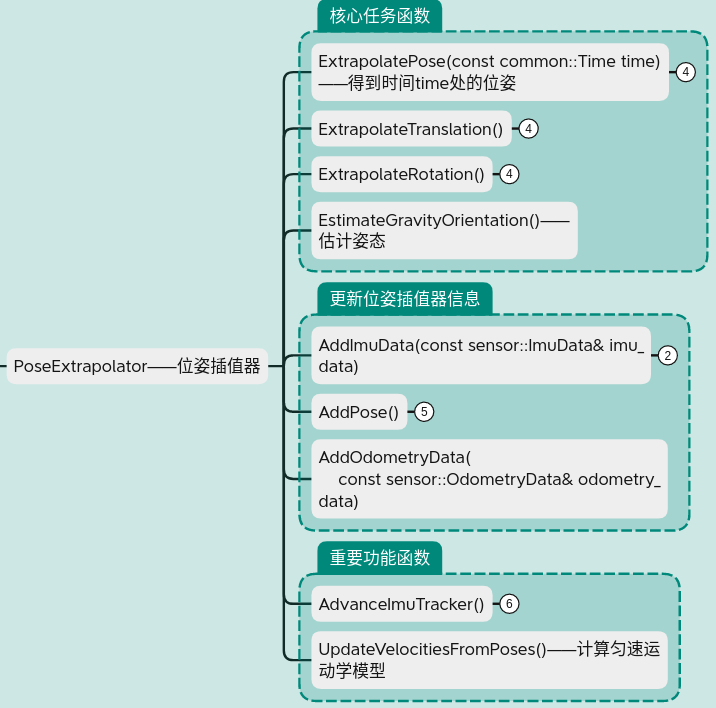
PoseExtrapolator
类框图如下
总结:
PoseExtrapolator 的作用——
主要用与前端里程计:
- 进行畸变去除
- 点与处理时 估计重力 EstimateGravityOrientation()
- 提供scanMatcher位姿的预测值 extrapolator_->ExtrapolatePose() 。
主要思想: 采用匀速运动学模型预测未来时间time处的pose.
而匀速运动学模型的平移速度 是由1.里程计或者2.两次scanmatch结果的微分得到,并优先采用里程计的数据.
角速度 是由1.采用两次scan-match的航向进行微分获得;2.里程计;3.直接用IMU的角速度测量,优先级最高;
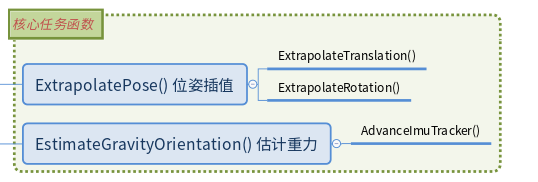
核心任务函数有两个:
文件: cartographer/mapping/pose_extrapolator.h , cartographer/mapping/pose_extrapolator.cc
一、信息更新
一共接收laser scan match pose、odom、imu的数据进行更新。
PoseExtrapolator中 laser, odom,imu的作用如下:
laser: 在没有IMU、odom的情况下估计运动速度,以及提供基准pose。
IMU:估计姿态。
ODOM:ODOM的测量数据并没有全部使用,只是提供关键时刻的线速度和角速度,。
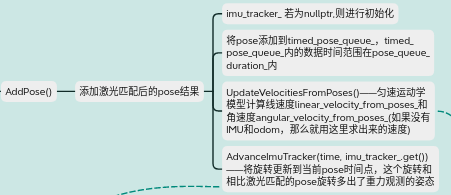
1.1 接收scan match pose
调用AddPose()
该函数添加激光匹配的结果来更新运动模型.
1.2 接收IMU数据
AddImuData(const sensor::ImuData& imu_data)

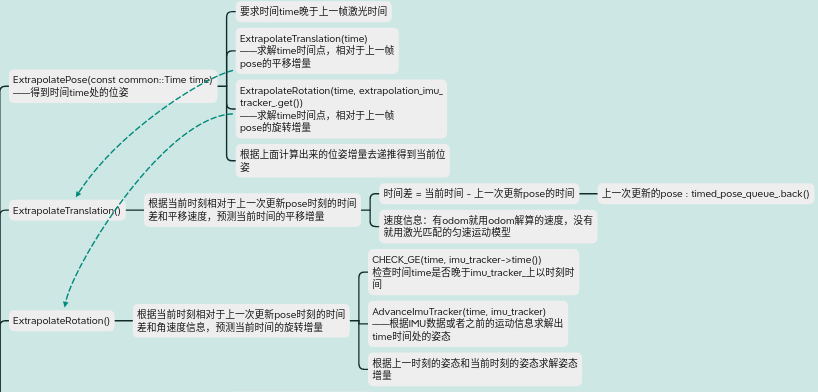
二、位姿插值
ExtrapolatePose(const common::Time time)
分为平移插值和旋转插值,
这里平移插值就是简单的依据当前线速度信息,然后根据匀速运动学模型提推下一时刻,如果有odom数据,可以采用精度更高的方法,就是直接用所有odom的数据递推到time时刻,
旋转插值:在有IMU的情况下,会用IMU所有数据递推time时刻pose,这个很正常,没IMU而有ODOM时,就近似的用ODOM观测角速度进行匀速运动学模型递推,虽然此时若能将ODOM的全部数据直接参与递推理论上会精度更高,但考虑到ODOM角速度本身就不高的测量精度,这样的近似操作也可以。
其中
三、 估计姿态
这个比较简单,就用了一个ImuTracker。
/**
* @brief 计算重力向量,用imu-tracker来进行计算.
* @param[in] time
* @return Eigen::Quaterniond
*/
Eigen::Quaterniond PoseExtrapolator::EstimateGravityOrientation(
const common::Time time) {
ImuTracker imu_tracker = *imu_tracker_;
AdvanceImuTracker(time, &imu_tracker);
return imu_tracker.orientation();
}
ImuTracker类分析在后。
ImuTracker类
ImuTracker类负责根据IMU的加速度与角速度测量,去估计姿态.
初始化时 姿态以及重力都被设置为与地面垂直:
主要思想是:
- 通过
Advance()函数根据角速度测量, 预测时间time处的姿态以及重力.
求解出姿态预测orientation_:
// 上一时刻的角速度乘以时间,得到当前时刻相对于上一时刻的预测的姿态变化量,再转换成四元数
const Eigen::Quaterniond rotation =
transform::AngleAxisVectorToRotationQuaternion(
Eigen::Vector3d(imu_angular_velocity_ * delta_t));
// 使用上一时刻的姿态 orientation_ 乘以姿态变化量, 得到当前时刻的预测出的姿态
orientation_ = (orientation_ * rotation).normalized(); // Qw_bt * Qbt_bt+1 = Qw_bt+1
根据姿态预测,求解出对应的重力向量:
gravity_vector_ = rotation.conjugate() * gravity_vector_; // Qbt_bt+1^-1 * g_b = Qbt+1_b * g_b = g_b+1
- 当加速度信息到来后, 利用加速度测量校正姿态,如下函数
void ImuTracker::AddImuLinearAccelerationObservation( const Eigen::Vector3d& imu_linear_acceleration)
首先将最新的加速度测量与预测的重力gravity_vector_通过滤波器进行融合, 然后 对预测的姿态 orientation_ 进行校正.
先计算权重
/********* 指数平均滤波 ***********/
// 计算权重 即 时间间隔越久 alpha 越接近1 那么 重力越倾向于 最新测量的结果
const double alpha = 1. - std::exp(-delta_t / imu_gravity_time_constant_);
将预测的重力和观测重力进行融合,得到优化重力。
// 一阶低通滤波 融合 IMU测量与后验重力
gravity_vector_ =
(1. - alpha) * gravity_vector_ + alpha * imu_linear_acceleration; // gravity_vector_ 是预测结果 重力在IMU系下的表示
这里要注意,由于仅有重力的观测会导致yaw姿态不可观,因此,不可直接用这个融合后的重力gravity_vector_ 去恢复姿态,注意到我们在预测环节已经求解了预测姿态orientation_,我们可以先根据融合后的重力和预测重力求解出旋转校正量:
// 求解出旋转矫正量
const Eigen::Quaterniond rotation = FromTwoVectors(
gravity_vector_, orientation_.conjugate() * Eigen::Vector3d::UnitZ());
rotation将gravity_vector_转换到观测重力向量,即
rotation * gravity_vector_ = orientation_.conjugate() * Eigen::Vector3d::UnitZ()
那么rotation 实际上是 融合校正后IMU坐标系 -> 预测IMU坐标系的旋转
Q
b
u
p
d
a
t
e
b
p
r
e
d
i
c
t
Q^{b_{predict}}_{b_{update}}
Qbupdatebpredict。
然后用这个微调旋转去矫正预测的姿态:
orientation_ = (orientation_ * rotation).normalized();
即
Q
b
u
p
d
a
t
e
n
=
Q
b
p
r
e
d
i
c
t
n
Q
b
u
p
d
a
t
e
b
p
r
e
d
i
c
t
Q^{n}_{b_{update}} = Q^{n}_{b_{predict}}Q^{b_{predict}}_{b_{update}}
Qbupdaten=QbpredictnQbupdatebpredict
姿态更新便完成了。
代码里,delta_t等于 与上次加速度校正的时间差, 从这段代码可以看出,
距离加速度校正的时间间隔越久, 就越不相信角速度预测的姿态, 而更相信下一次加速度测量出来的姿态.
由于角速度信息短时间比较准, 因此短时间内更偏向于角速度预测出来的姿态, 而由于累计误差的存在,长时间角速度积累的误差较大, 而加速度测量与时间无关,所以长时间更偏向与加速度的测量.
总之是一种非常朴素简单的思想, 精度肯定不高,但是对于机器人来说足够了.
- 当角速度信息来了后, 通过
AddImuAngularVelocityObservation()更新角速度信息.















 2100
2100











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









