







一、介绍
启动多个节点时,要打开很多窗口,这样会很麻烦。使用launch文件,可以同时运行多个节点。
launch文件是一 种遵循XML语法的描述文件,批量启动ROS节点只是它的功能之一。以下是XML的基本语法之一:

描述一组多层嵌套的数据结构,就是XML语言的主要作用之一。例如下述例子:

这种语言格式对ros有什么用呢?举个例子,假如我们现在有两个package,三个node,他们之间的通信是这样的:

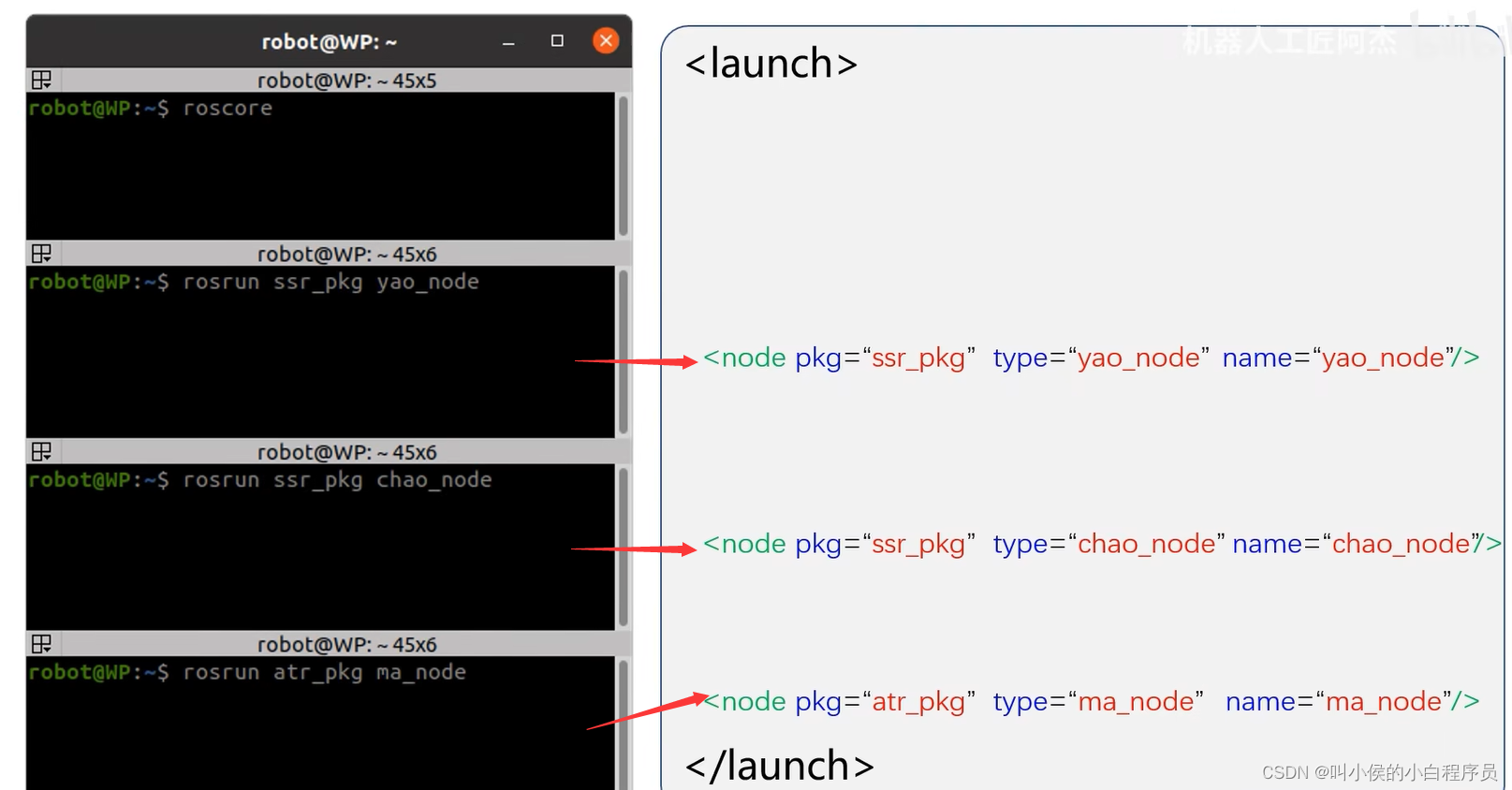
为了能运行,我们需要打开四个终端,分别为:启动ros核心、分别运行三个node:
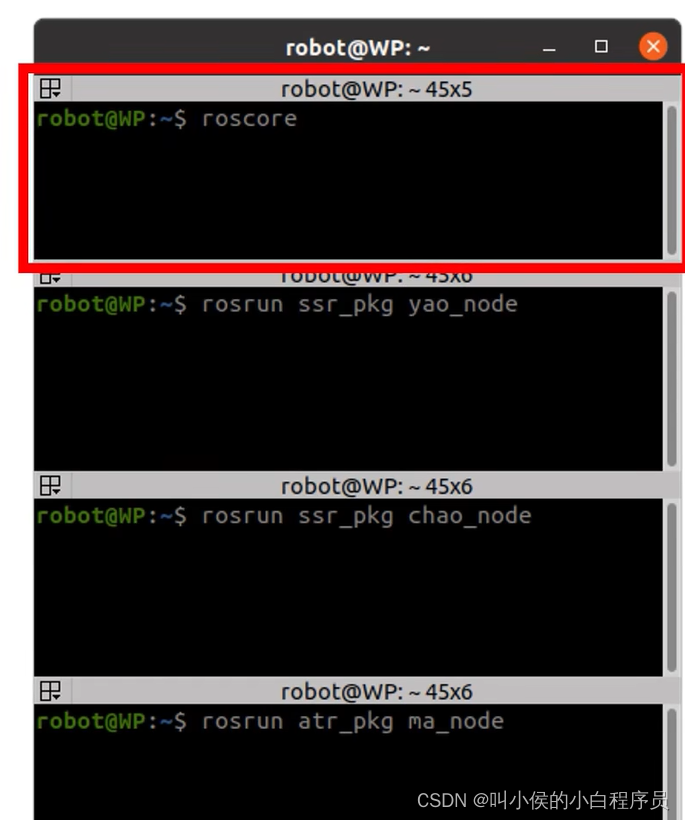
roscore不需要加进去,因为launch文件的机制就是,只要包含了节点的描述,哪怕只有一个节点都会自动启动roscore,所以没有描述也没有关系。
二、编译运行launch文件
launch文件只要随便放在某个软件包的文件夹里就行了,当我们使用指令启动launch文件时,会自动对指定软件包的目录进行逐层的遍历搜索。所以只要launch文件放在软件包的文件夹里,都可以被找到并执行。
step1:在软件包的任意一个位置,创建一个xxx.launch文件。将想要运行的节点,以及他们的属性都写进去。

step2:编译+运行


有一个问题,这里明明应该有两个话题,两个输出,但是输出的只有一个。
解决方法:在订阅者节点,将output指定为screen屏幕:

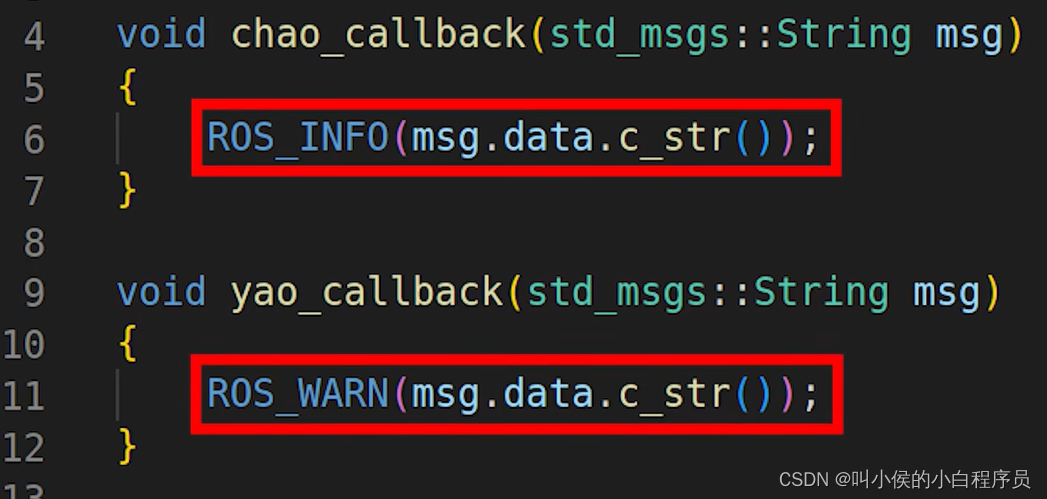
再次运行就正常了,这是因为 :第一个节点的消息用的是ROS LINFO显示的白色信息,,第二个节点的消息用的ROS aWARN显示的是黄色信息。可见刚才加的output属性,只对ROS INFO显示产生了影响

step3:所有的节点都在这一个终端里输出,假设我们要调试其中的某个节点,会希望这个节点能够在一个独立的窗口里输出调试信息,否则所有的节点混在一起,根本看不出哪条是哪个节点的信息,如何解决?

在你想单独有运行窗口的节点上,加上launch-prefix属性即可。
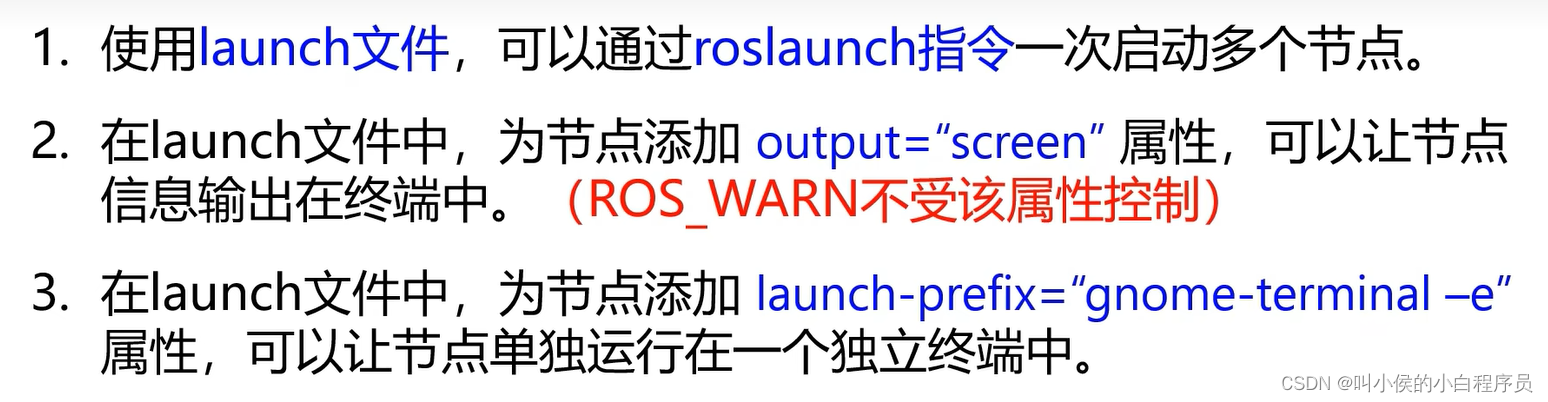
三、总结















 4761
4761











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









