









1、Subscribe Ackermann Location Information C
(1)输入参数:无
(2)输出参数:Xr和Yr是小车当前在世界坐标系下的坐标
(3)主要作用:作为ROS与MATLAB的通讯接口,从ROS中订阅小车当前的位置信息,并输出
(4)内部结构:
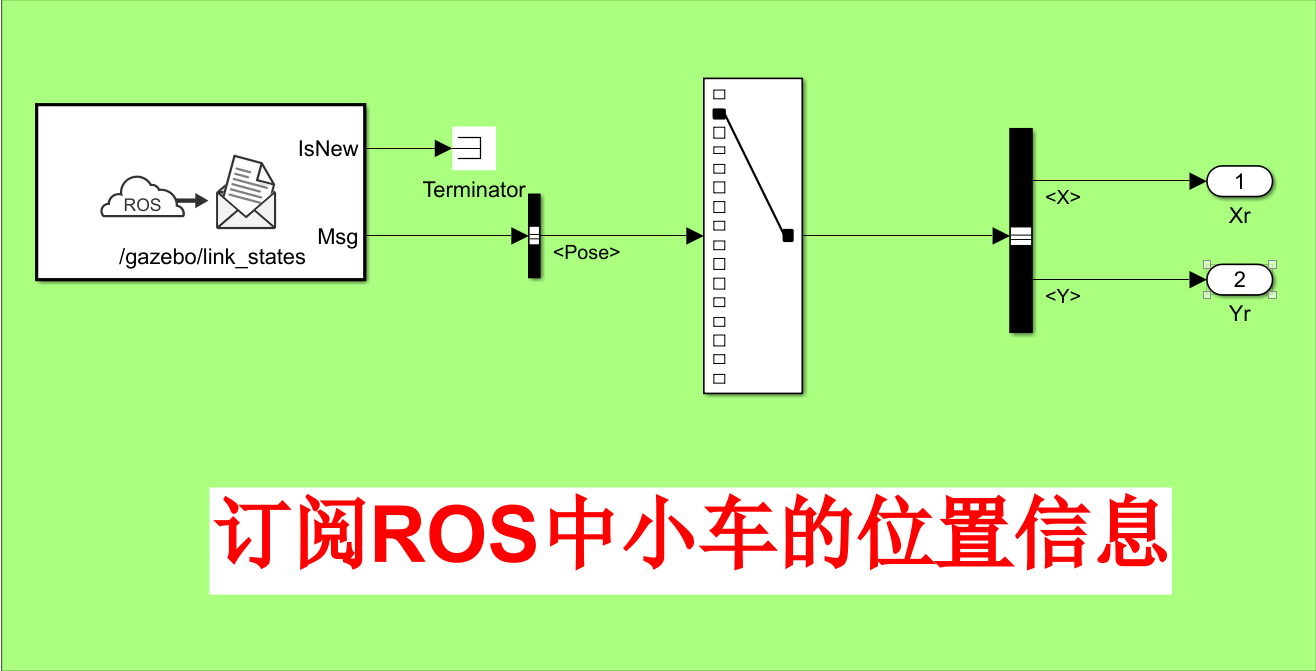
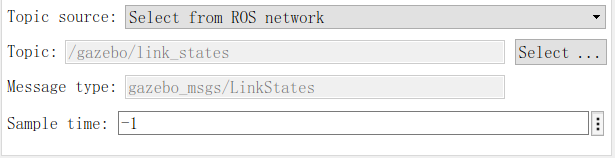
(5)具体实现过程:通过ROS工具箱中的Subscribe模块从ROS中订阅话题/gazebo/link_statesa
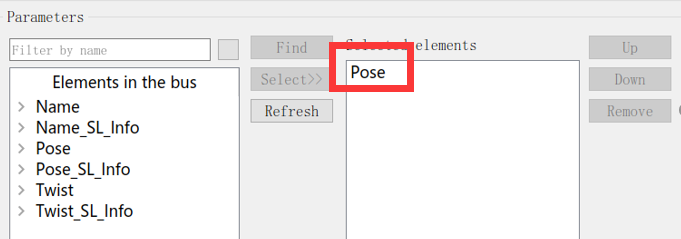
通过Bus Selector模块选择ROS总线中的Pose
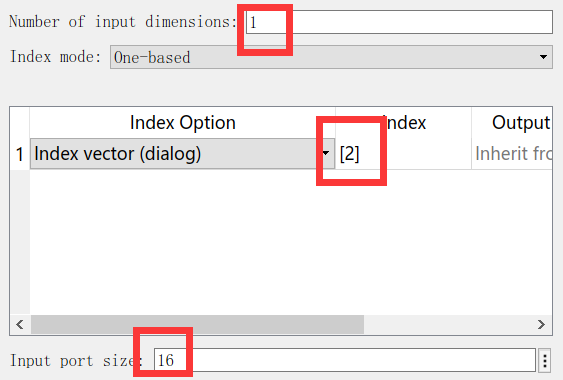
使用Selector模块选择其中的第2路信号,并设置维度为1,大小为16
再次使用Bus Selector模块选择Position中的X和Y,即我们需要的位置信息
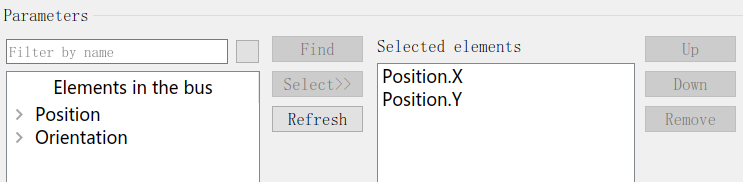
将分离出的信息输出
(6)其他说明:无
2、Subscribe Ackermann Robot Posture C
(1)输入参数:无
(2)输出参数:yaw、pitch、roll是小车姿态的欧拉角信息,本实验中主要使用yaw,即机器人坐标系与世界坐标系的夹角
(3)主要作用:作为ROS与MATLAB的通讯接口,以四元数的形式从ROS中的小车上搭载的IMU传感器中订阅小车当前的姿态信息,并通过转换公式将其转换为欧拉角进行输出。
(4)内部结构:
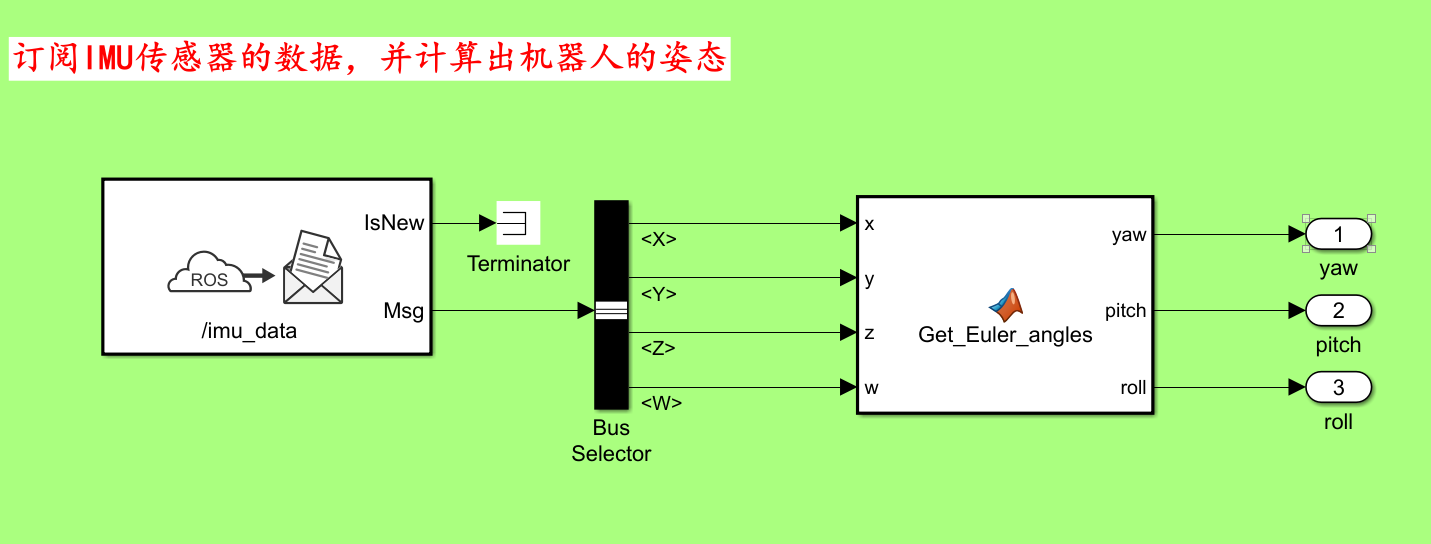
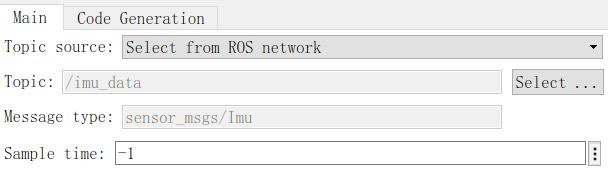
(5)具体实现过程:通过ROS工具箱中的Subscribe模块从ROS中订阅话题/imu_data
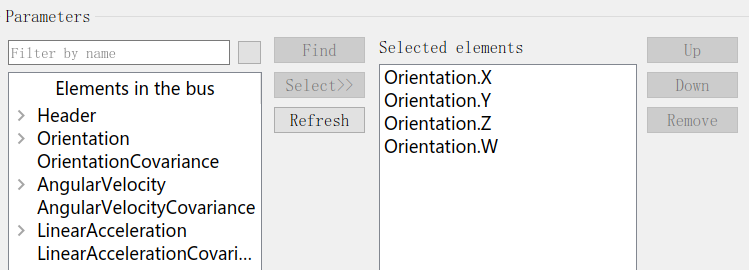
通过Bus Selector模块选择Orientation中的X、Y、Z、W,即四元数
通过MATLAB Function模块编写将四元数转换为欧拉角的函数,该函数的输入参数为读取到的四元数,输出参数即我们需要的欧拉角,注意所有的角度计算均为弧度制
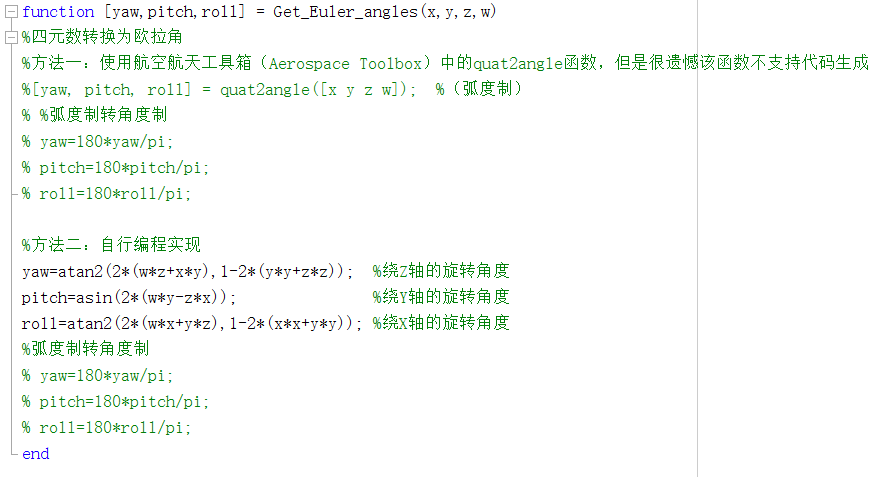
然后将我们计算出的欧拉角输出就可以了
(6)其他说明:无
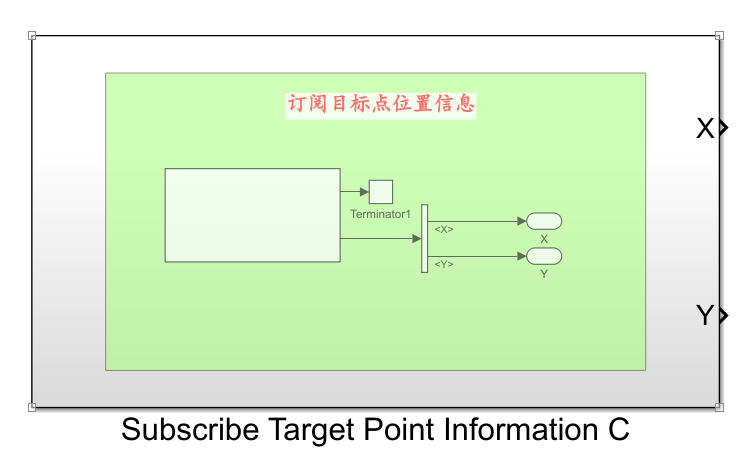
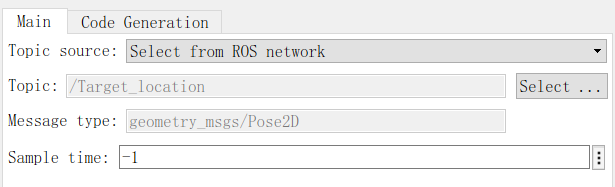
3、Subscribe Target Point Information C
(1)输入参数:无
(2)输出参数:X,Y是小车当前的目标点的坐标,也就是小车当前要跟踪的点的坐标
(3)主要作用:作为ROS与MATLAB的通讯接口,从ROS中的订阅小车目标点的位置信息,并输出。
(4)内部结构:

(5)具体实现过程:通过ROS工具箱中的Subscribe模块从ROS中订阅话题/Target_location话题
通过Bus Selector模块选择其中的X、Y,即我们需要的目标点在世界坐标系下的位置坐标
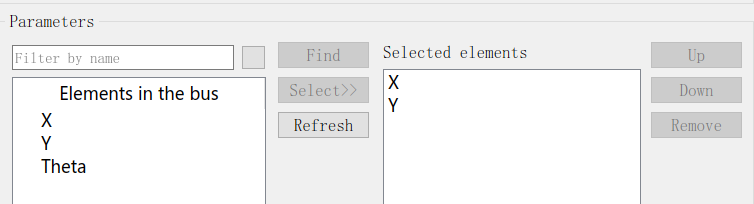
然后将目标点的位置信息输出
(6)其他说明:注意订阅的/Target_location话题是我们自定义的话题,该模块需要与发布该话题的模块Publish Target Point Information C搭配使用,使用方法为在生成ROS代码的时候将Publish Target Point Information C模块包含在内,这样将生成的代码放到ROS中执行的时候,就会发布这个话题了,此时再在MATLAB中使用Subscribe Target Point Information C模块订阅该话题,就可以对目标点的位置进行观测了。
4、Subscribe to RGB images
(1)输入参数:无
(2)输出参数:无
(3)主要作用:订阅小车搭载的深度相机发布的RGB彩色信息,并以实时图像的形式显示出来
(4)内部结构:
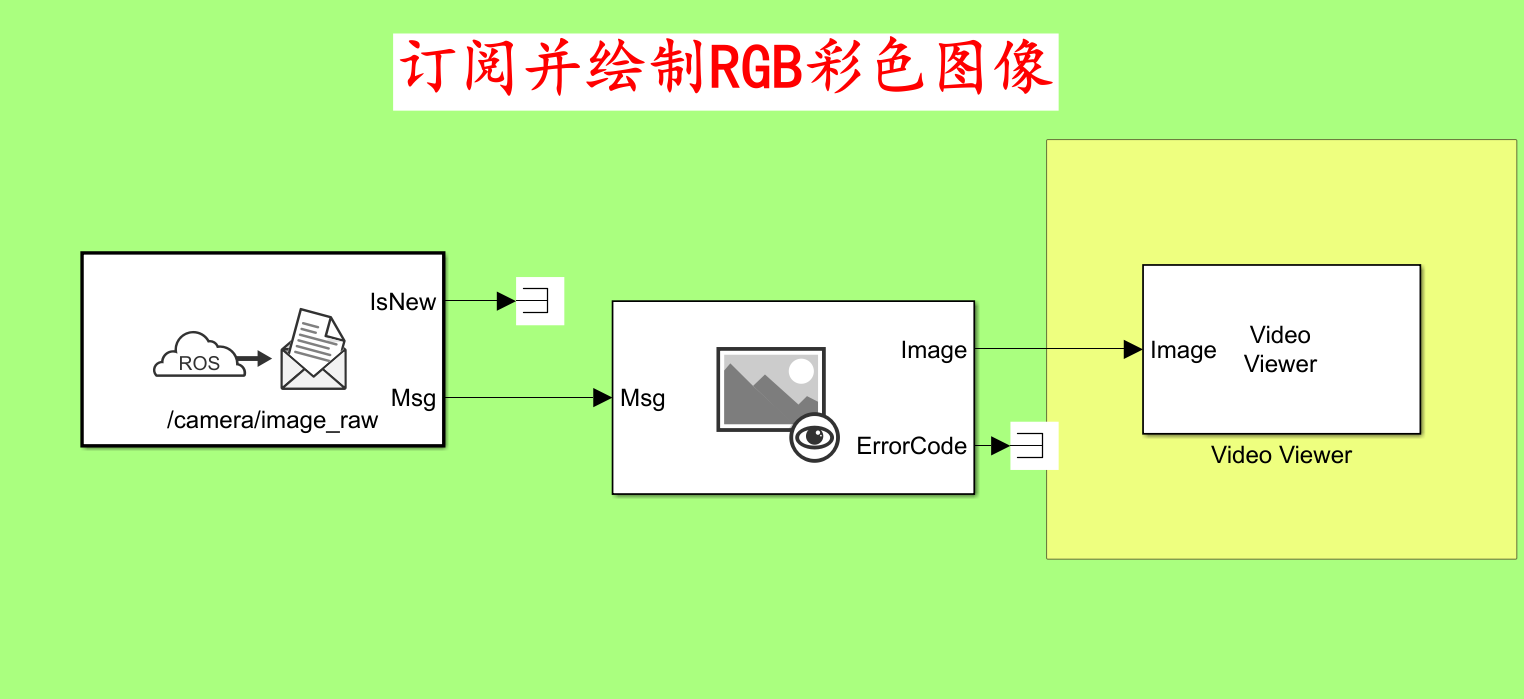
(5)具体实现过程:通过ROS工具箱中的Subscribe模块从ROS中订阅话题/camera/image_raw
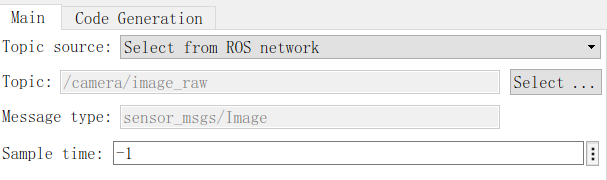
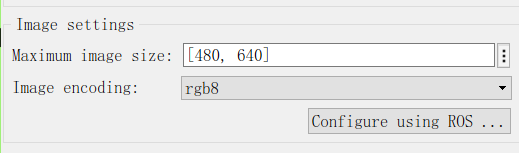
将输出端Msg输送给read image模块,双击该模块,设置像素为480x 640
将read image模块的输出端image输送给Video Viewer模块进行显示
(6)其他说明:无
5、Subscribe to depth and point cloud images
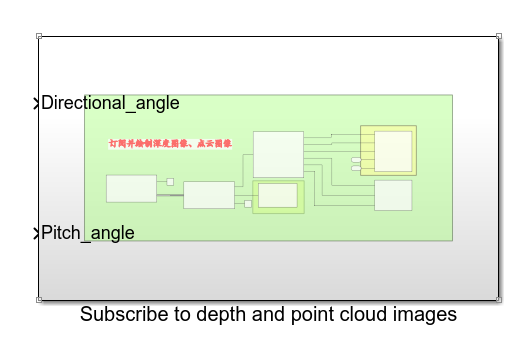
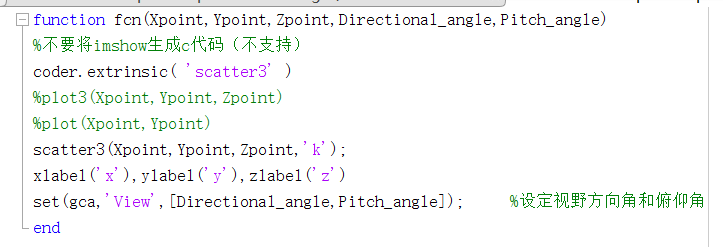
(1)输入参数:Directional_angle用于设定点云图像的方向角,一般设置为0,Pitch_angle用于设定点云图像的俯仰角,常用值为-90和0,这两个输入参数均用来调节3D点云图像的视野
(2)输出参数:无
(3)主要作用:订阅小车搭载的深度相机发布的深度信息,并以实时图像的形式显示出其深度图像、点云图像、点云质心
(4)内部结构:
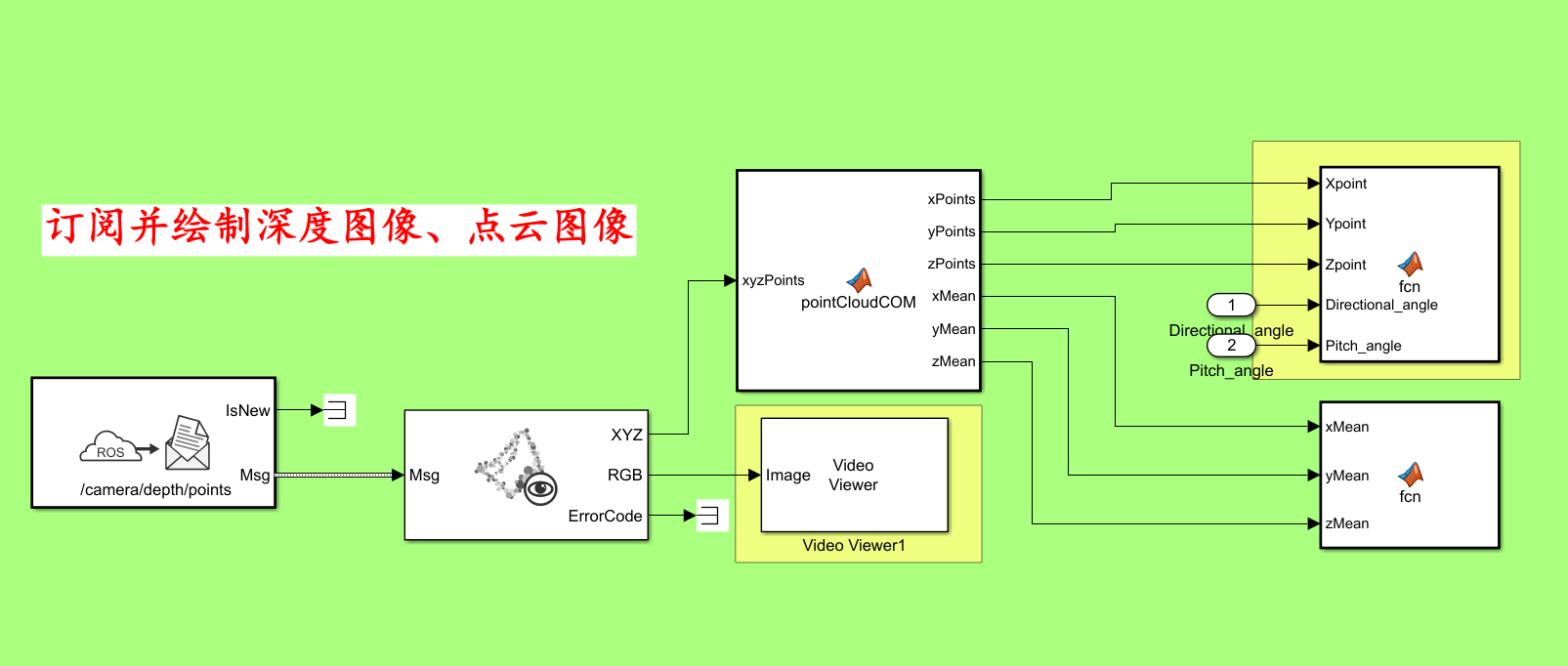
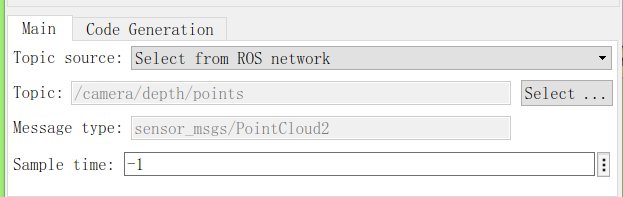
(5)具体实现过程:通过ROS工具箱中的Subscribe模块从ROS中订阅话题/cameraldepth/points
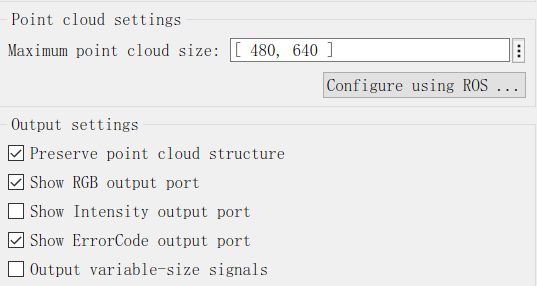
将输出端Msg输送给Read Point Cloud模块,双击该模块,并进行如下图所示的配置
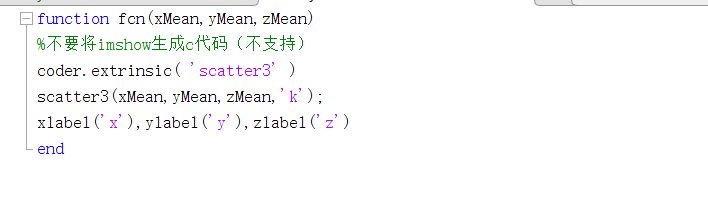
将Read Point Cloud模块的输出端XYZ输送给pointCloudCOM函数块将坐标矩阵拆分成X、Y、Z的列向量输出,并计算出点云质心进行输出,pointCloudCOM函数块的内容如下:
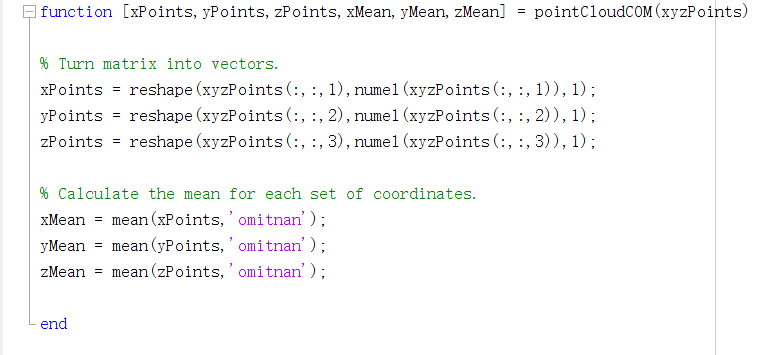
将Read Point Cloud模块的输出端RGB输送至Video Viewer模块,显示其深度图像,将pointCloudCOM函数块的输出输送至fcn函数块,分别绘制点云图,及点云质心其内部程序如下所示

















 979
979











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











