







 WoodScape是ICCV 2019年发布的一个用于自动驾驶的多任务、多相机鱼眼数据集,包含了实例级别的语义注释和多种任务的标注,旨在促进统一的多任务和多相机模型的研究。数据集由4个环视摄像头捕获,涵盖超过10,000张图像,并引入了新的污染检测任务。"
79822391,6884070,Java实现判断平面坐标构成正方形,"['Java', '几何算法', '坐标系统', '条件判断']
WoodScape是ICCV 2019年发布的一个用于自动驾驶的多任务、多相机鱼眼数据集,包含了实例级别的语义注释和多种任务的标注,旨在促进统一的多任务和多相机模型的研究。数据集由4个环视摄像头捕获,涵盖超过10,000张图像,并引入了新的污染检测任务。"
79822391,6884070,Java实现判断平面坐标构成正方形,"['Java', '几何算法', '坐标系统', '条件判断']
WoodScape 论文笔记
WoodScape: A multi-task, multi-camera fisheye dataset for autonomous driving(ICCV 2019)
摘要
- 动机:鱼眼摄像头用得很多,但是缺乏相关的数据集
- 解决方案:
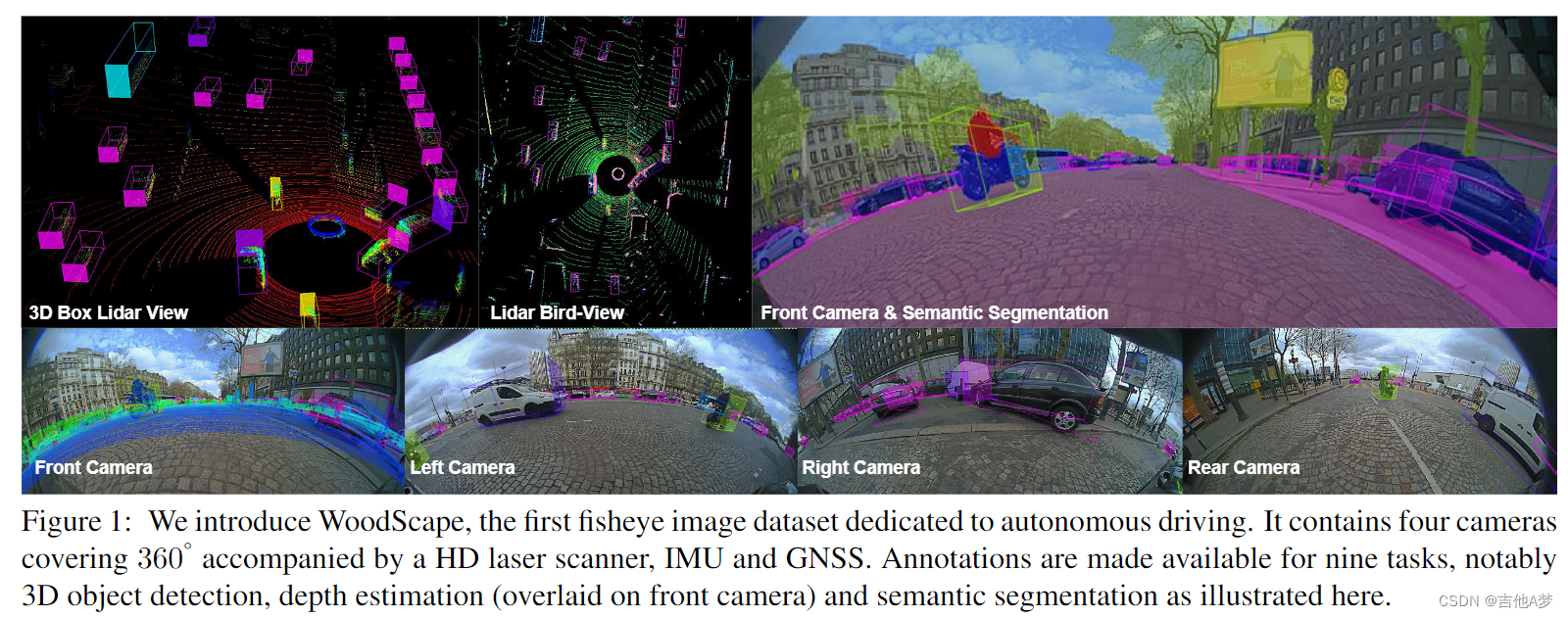
- 发布鱼眼汽车数据集——WoodScape,由4个环视摄像头和9个任务组成(分割、深度估计、3D 边界框检测和污点检测等)。
- 为超过10000张图片提供了实例层级的40个类别的语义注释
- 为超过100000张图片提供了其他任务的注释
引言
- 环视图例

- 贡献
- 第一个鱼眼数据集,包含超过 10,000 张包含实例级语义注释的图像
- 四相机九任务数据集,旨在鼓励统一的多任务和多相机模型
- 引入新的污染检测任务并发布同类数据集
- 为 3D 框检测任务提出一种指标,将训练时间提高 95 倍
Overview of Fisheye Camera Projections
-
鱼眼失真:由径向映射函数 r(θ) 建模,其中 r(θ) 是图像上到失真中心的距离,是入射光线相对于光轴的角度 θ 的函数。失真中心是光轴与像平面的交点,是径向映射函数 r(θ) 的原点
-
常用模型:Stereographic projection、UCM、eUCM

-
提出新模型:模型基于四阶多项式,将入射角映射到以像素为单位的图像半径,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1167
1167











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









