






引言
同样Opencv+Python实现双目相机的标定,单目标定详见【ZED】从零开始使用ZED相机(五):Opencv+Python实现相机标定(单目)
1 cv2.stereoCalibrate 函数介绍
调用方法
stereoCalibrate(objectPoints, imagePoints1, imagePoints2, cameraMatrix1, distCoeffs1, cameraMatrix2, distCoeffs2, imageSize, R=None, T=None, E=None, F=None, flags=None, criteria=None)
# 参数含义
objectPoints- vector<point3f> 型的数据结构,存储标定角点在世界坐标系中的位置
imagePoints1- vector<vector<point2f>> 型的数据结构,存储标定角点在第一个摄像机下的投影后的亚像素坐标
imagePoints2- vector<vector<point2f>> 型的数据结构,存储标定角点在第二个摄像机下的投影后的亚像素坐标
cameraMatrix1-输入/输出型的第一个摄像机的相机矩阵。如果CV_CALIB_USE_INTRINSIC_GUESS , CV_CALIB_FIX_ASPECT_RATIO ,CV_CALIB_FIX_INTRINSIC , or CV_CALIB_FIX_FOCAL_LENGTH其中的一个或多个标志被设置,该摄像机矩阵的一些或全部参数需要被初始化
distCoeffs1-第一个摄像机的输入/输出型畸变向量。根据矫正模型的不同,输出向量长度由标志决定
cameraMatrix2-输入/输出型的第二个摄像机的相机矩阵。参数意义同第一个相机矩阵相似
distCoeffs2-第一个摄像机的输入/输出型畸变向量。根据矫正模型的不同,输出向量长度由标志决定
imageSize-图像的大小
R-输出型,第一和第二个摄像机之间的旋转矩阵
T-输出型,第一和第二个摄像机之间的平移矩阵
E-输出型,基本矩阵
F-输出型,基础矩阵
term_crit-迭代优化的终止条件
flag-
CV_CALIB_FIX_INTRINSIC 如果该标志被设置,那么就会固定输入的cameraMatrix和distCoeffs不变,只求解R,T,E,F
CV_CALIB_USE_INTRINSIC_GUESS 根据用户提供的cameraMatrix和distCoeffs为初始值开始迭代
CV_CALIB_FIX_PRINCIPAL_POINT 迭代过程中不会改变主点的位置
CV_CALIB_FIX_FOCAL_LENGTH 迭代过程中不会改变焦距
CV_CALIB_SAME_FOCAL_LENGTH 强制保持两个摄像机的焦距相同
CV_CALIB_ZERO_TANGENT_DIST 切向畸变保持为零
CV_CALIB_FIX_K1,...,CV_CALIB_FIX_K6 迭代过程中不改变相应的值。如果设置了 CV_CALIB_USE_INTRINSIC_GUESS 将会使用用户提供的初始值,否则设置为零
CV_CALIB_RATIONAL_MODEL 畸变模型的选择,如果设置了该参数,将会使用更精确的畸变模型,distCoeffs的长度就会变成8
2 cv2.stereoCalibrate 实现双目标定
分别采集左右相机拍摄的棋盘格图象各15-20张左右,分别放在两个文件夹中(笔者采集的比较多,MATLAB计算的重投影误差太大时可以剔除掉一部分图象):
实现代码如下:
# 类三:相机标定执行函数(双目校正)
class Stereo_calibrate(): # 执行校正
def __init__(self):
# 终止条件
self.criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 准备对象点,棋盘方块交界点排列:6行8列 如 (0,0,0), (1,0,0), (2,0,0) ....,(6,8,0)
self.row,self.col = 8,11
self.objpoints = np.zeros((self.row * self.col, 3), np.float32)
self.objpoints[:, :2] = np.mgrid[0:self.row, 0:self.col].T.reshape(-1, 2)
def exe(self,dir_l,dir_r):
objectpoints = [] # 真实世界中的3d点
imgpoints_l = []
imgpoints_r = []
# 标定所用图像
images_l = glob.glob('%s/*'%dir_l)
images_r = glob.glob('%s/*' % dir_r)
for i in range(len(images_l)):
img_l = cv2.imread(images_l[i])
gray_l = cv2.cvtColor(img_l, cv2.COLOR_BGR2GRAY)
img_r = cv2.imread(images_r[i])
gray_r = cv2.cvtColor(img_r, cv2.COLOR_BGR2GRAY)
# 寻找到棋盘角点
ret1, corners_l = cv2.findChessboardCorners(img_l, (self.row, self.col), None)
ret2, corners_r = cv2.findChessboardCorners(img_r, (self.row, self.col), None)
# 如果找到,添加对象点,图像点(细化之后)
if ret1 == True and ret2 == True:
# 添加每幅图的对应3D-2D坐标
objectpoints.append(self.objpoints)
corners_l = cv2.cornerSubPix(gray_l, corners_l, (11, 11), (-1, -1),self.criteria)
imgpoints_l.append(corners_l)
corners_r = cv2.cornerSubPix(gray_r, corners_r, (11, 11), (-1, -1), self.criteria)
imgpoints_r.append(corners_r)
# # 绘制并显示拐角
# cv2.drawChessboardCorners(img_l, (self.row, self.col), corners_l, ret)
# cv2.drawChessboardCorners(img_r, (self.row, self.col), corners_r, ret)
# view = np.concatenate((img_l, img_r), axis=1)
# cv2.namedWindow('View')
# cv2.imshow("View", cv2.resize(view,(1920,540)))
# cv2.waitKey(0)
# cv2.destroyAllWindows()
# 利用单目校正函数实现相机内参初始化
ret, m1, d1, _, _ = cv2.calibrateCamera(objectpoints, imgpoints_l, gray_l.shape[::-1], None, None)
ret, m2, d2, _, _= cv2.calibrateCamera(objectpoints, imgpoints_l, gray_l.shape[::-1], None, None)
# config
flags = 0
# flags |= cv2.CALIB_FIX_ASPECT_RATIO
flags |= cv2.CALIB_USE_INTRINSIC_GUESS
# flags |= cv2.CALIB_SAME_FOCAL_LENGTH
# flags |= cv2.CALIB_ZERO_TANGENT_DIST
flags |= cv2.CALIB_RATIONAL_MODEL
# flags |= cv2.CALIB_FIX_K1
# flags |= cv2.CALIB_FIX_K2
# flags |= cv2.CALIB_FIX_K3
# flags |= cv2.CALIB_FIX_K4
# flags |= cv2.CALIB_FIX_K5
# flags |= cv2.CALIB_FIX_K6
stereocalib_criteria = (cv2.TERM_CRITERIA_COUNT +
cv2.TERM_CRITERIA_EPS, 100, 1e-5)
# 输入参数:真实3d坐标点,左相机像素点、右相机像素点、左内参、左畸变、右内参、右畸变、图像尺寸、一些配置
# 输出值:未知、左内参、左畸变、右内参、右畸变(迭代优化后的)、旋转矩阵、平移向量、本质矩阵、基础矩阵
ret, m1, d1,m2, d2, R, t, E, F = cv2.stereoCalibrate(objectpoints,imgpoints_l,imgpoints_r,
m1, d1,m2, d2, gray_l.shape[::-1],
criteria=stereocalib_criteria, flags=flags)
# 构建单应性矩阵
plane_depth = 40000000.0 # arbitrary plane depth
# TODO: Need to understand effect of plane_depth. Why does this improve some boards' cals?
n = np.array([[0.0], [0.0], [-1.0]])
d_inv = 1.0 / plane_depth
H = (R - d_inv * np.dot(t, n.transpose()))
H = np.dot(m2, np.dot(H, np.linalg.inv(m1)))
H /= H[2, 2]
# rectify Homography for right camera
disparity = (m1[0, 0] * t[0] / plane_depth)
H[0, 2] -= disparity
H = H.astype(np.float32)
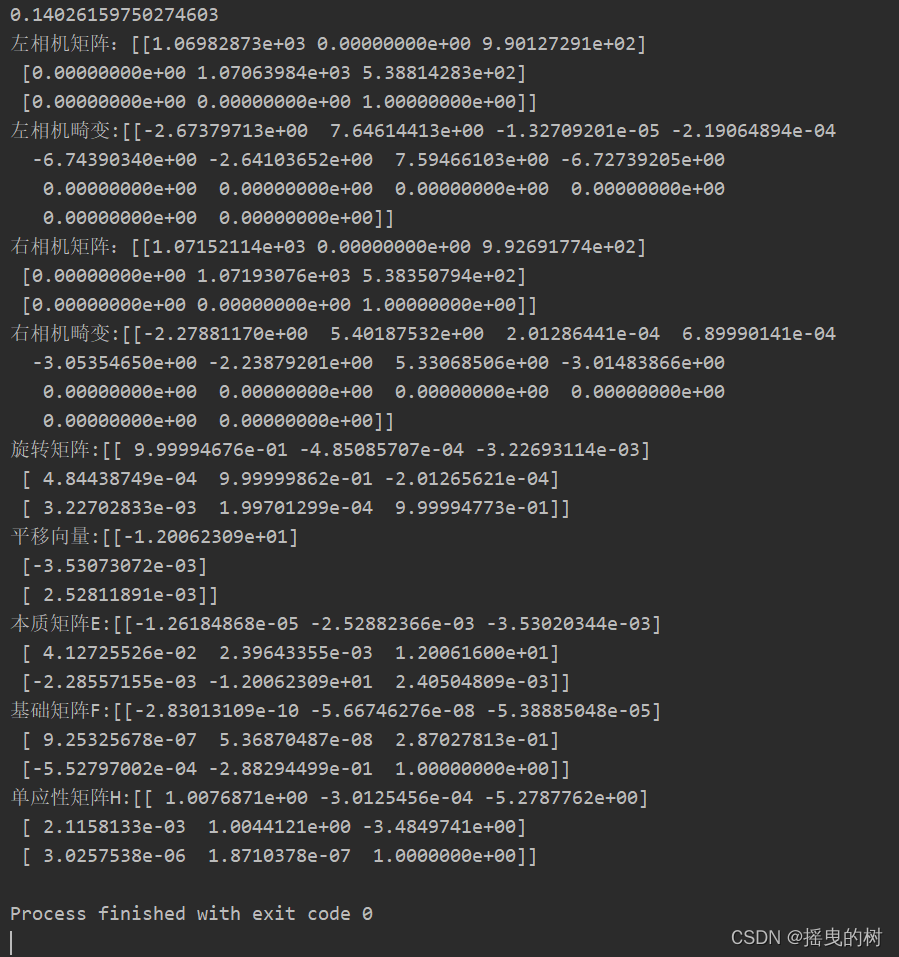
print(ret,'\n左相机矩阵:%s\n左相机畸变:%s\n右相机矩阵:%s\n右相机畸变:%s\n旋转矩阵:%s\n平移向量:%s'
'\n本质矩阵E:%s\n基础矩阵F:%s\n单应性矩阵H:%s'
%(m1, d1,m2, d2, R, t, E, F,H))
函数调用如下:
if __name__ == "__main__":
# 双目校正
cal = Stereo_calibrate()
cal.exe(r'E:\Alian\yolov5\zed-examples-master\images\1080\L',r'E:\Alian\yolov5\zed-examples-master\images\1080\R')
在终端打印结果如下:
3 对比MATLAB的双目校正
(1)相机内参
MATLAN结果:
左相机:
右相机:
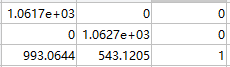
OpenCV结果:
左相机:
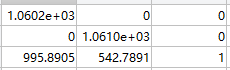
右相机:
(2)畸变系数
MATLAN结果:(默认K3=0)
左相机:
右相机:

OpenCV结果:
左相机:
右相机:
(3)旋转矩阵
MATLAN结果:
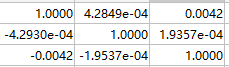
OpenCV结果:
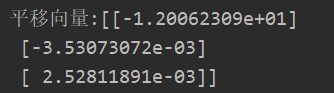
(4)平移向量
MATLAN结果:

OpenCV结果:
(5)本质矩阵
MATLAN结果:
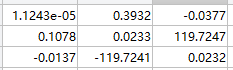
OpenCV结果:
(6)基础矩阵
MATLAN结果:

OpenCV结果:
(7)单应性矩阵
MATLAN结果:无
OpenCV结果:

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









