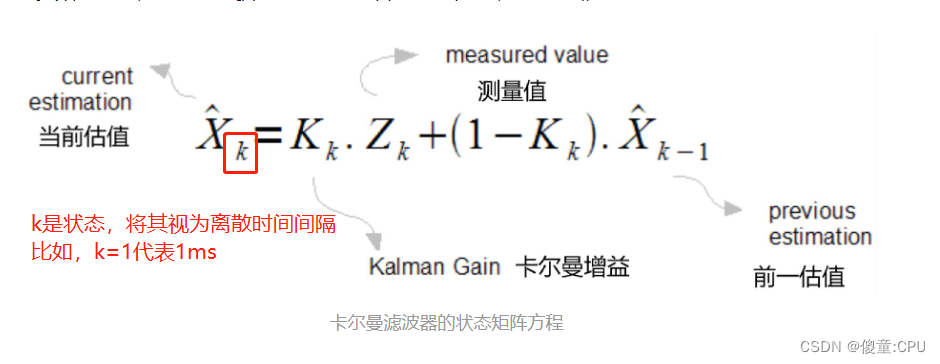
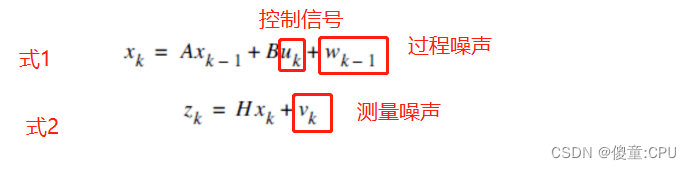
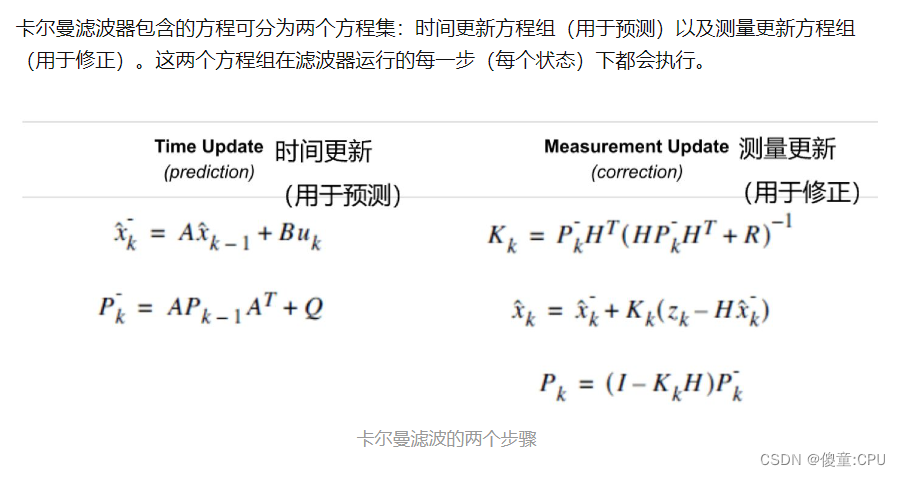
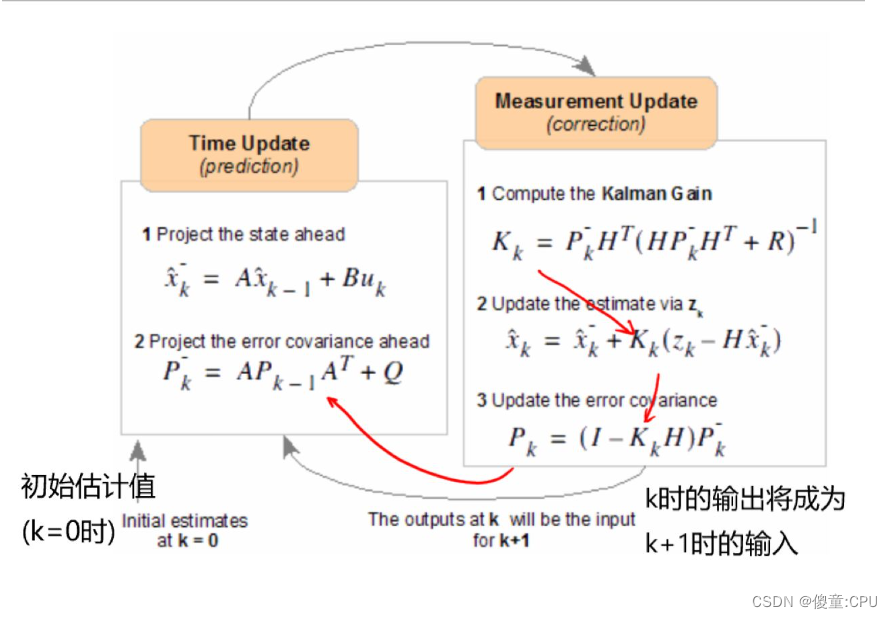
卡尔曼滤波器 在信号处理、通信和现代控制系统中,需要对一个随机动态系统的状态进行估计。由一个测量装置对系统状态进行测量,这个测量过程是间接的和有噪的,通过记录的观测值对状态进行最优估计,并且这种估计是递推进行的,这是卡尔曼滤波(Kalman Filter,KF)所解决的问题。 目的是找到信号x 的估值 ,。并且希望能对所有的k值都能找到对应的估值。 第一步:建立模型 过程噪声和测量噪声互相统计独立。 噪声参数越接近实际,输出真实值就越好。 第二步:开始过程 决定一些必要的参数以及初始值。 第三步:迭代 记住:前一状态的估值将成为当前状态的输入。 基于卡尔曼滤波器的PID控制 卡尔曼









 超级会员免费看
超级会员免费看


 订阅专栏 解锁全文
订阅专栏 解锁全文

















 686
686











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








