






报错:
/opt/ros/neotic/include/moveit/robot_model/joint_model.h:47:26: fatal error: Eigen/Geometry: 没有那个文件或目录
compilation terminated.
解决办法:
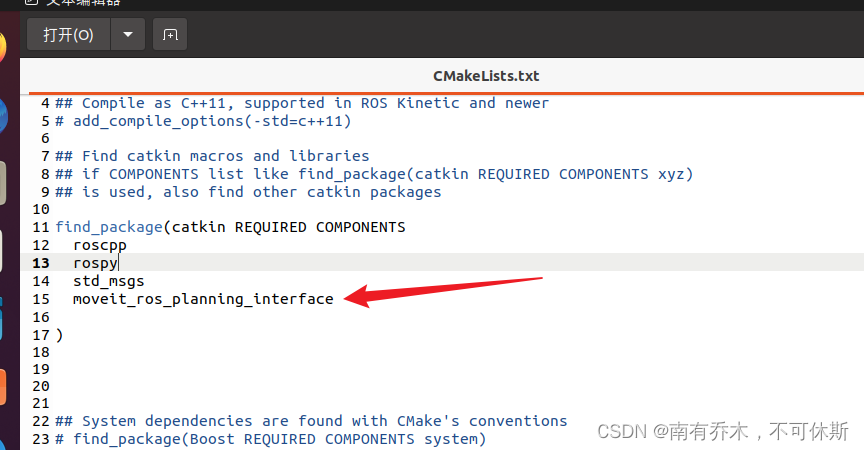
1、在CMakeLists中的find_package中加入:moveit_ros_planning_interface。
2、在package.xml中加入moveit_ros_planning_interface作为依赖。

然后再次回到工作空间下编译,即可通过。















 1339
1339











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









