






1、astra相机驱动
2、camera_calibration标定包
下载链接
放到工作空间下编译即可
3、标定
3-1、启动相机
sudo -s
roslaunch astra_launch astra.launch
3-2、标定
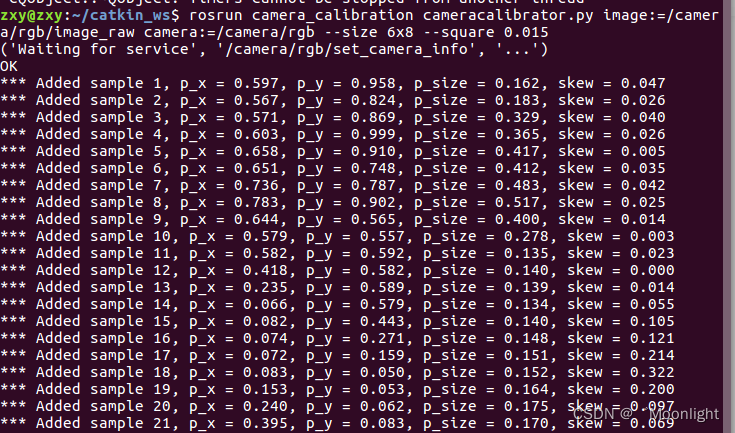
rosrun camera_calibration cameracalibrator.py image:=/camera/rgb/image_raw camera:=/camera/rgb --size 6x8 --square 0.015
--size 8x6 为当前标定板的标定角点数
==square 0.015为每个棋盘格的边长,单位为m
image:=image:=/camera/rgb/image_raw 标定当前订阅图像来源的topic
camera:=/rgb为相机话题
3-3、标定方案
- 方案一:三组,正视14张、仰视14张、俯视14张,所有照片仅相对水平轴旋转,正视照片占相机视野四分之三,俯仰视照片占相机视野四分之一,每组内的14张照片是划出了一个矩形的轮廓,中间2张,四周12张;
- 方案二:三组,正视14张、仰视14张、俯视14张,正视照片无转角(无任何旋转),仰视和俯视的照片成扇面状对着相机(既绕水平轴又绕铅垂轴),正视照片占相机视野四分之三,俯仰视照片占相机视野四分之一,14张照片是划出了一个矩形的轮廓,中间2张,四周12张;
- 方案三:其他与方案二一致,只是仰视和俯视的照片成楔子状对着相机;
- 方案四:三组,正视14张、仰视14张、俯视14张,正视、仰视和俯视的照片全部成扇面状对着相机,正视照片占相机视野四分之三,俯仰视照片占相机视野四分之一,14张照片是划出了一个矩形的轮廓,中间2张,四周12张;
- 方案五:其他与方案四一致,只是正视俯视仰视照片成楔子状对着相机;
- 方案六:先拍四张正视,然后左远右近(就是标定板的左边离相机远右边离相机近,下同)四张,左近右远四张,上远下近四张,上近下远四张——既不是楔子型也不是扇面形;
- 方案七:长轴中线上,均匀变换角度,拍9张,短轴中线上,均匀变化角度,拍9张,然后四个角各补一张,共22张。
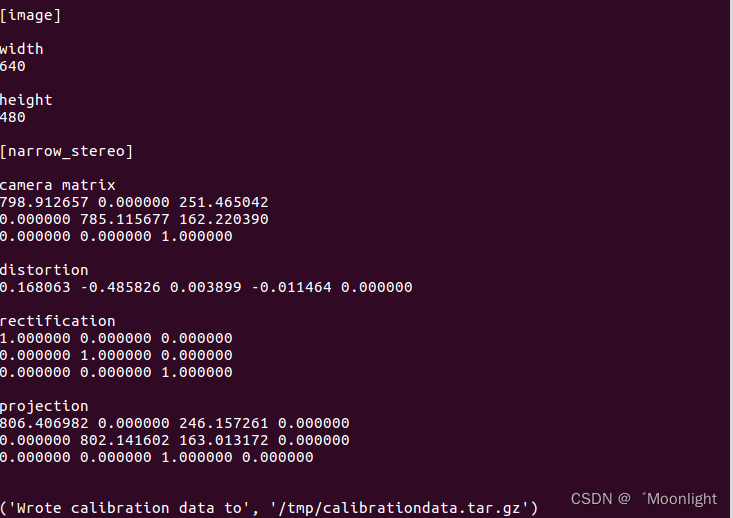
3-4、结果保存
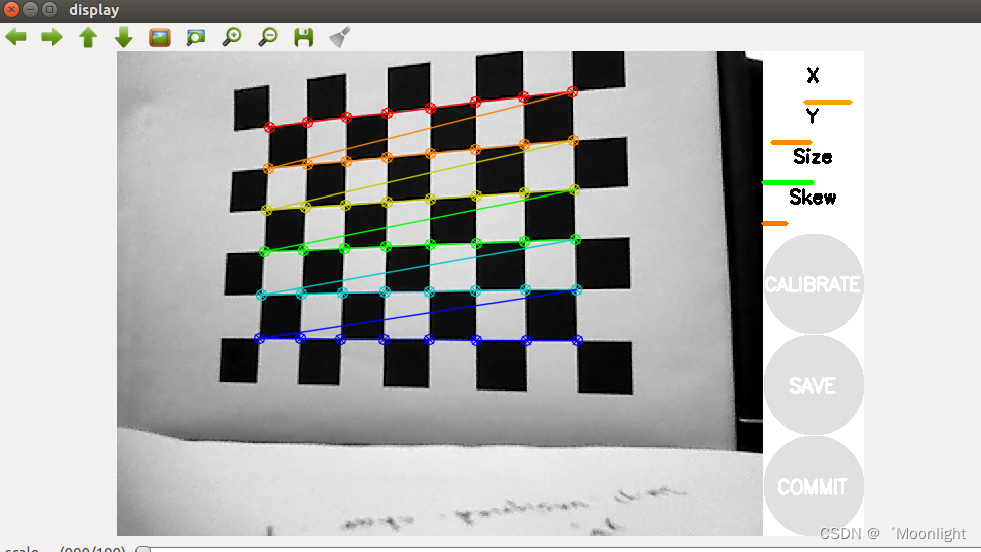
CALIBRATE键 亮即可计算结果
SAVE键 保存结果
COMMIT键 将结果设置为默认参数
4、参考文章
https://blog.csdn.net/zxxxiazai/article/details/108168120
https://blog.csdn.net/YOULANSHENGMENG/article/details/124659099
https://blog.csdn.net/qq_35789421/article/details/99304707
https://blog.csdn.net/zilanpotou182/article/details/68491447















 593
593











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









