






***
1、代码
1-1 pcd_to_rviz.cpp
#include <ros/ros.h>
#include <pcl/point_types.h>
#include <pcl_conversions//pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/common/transforms.h>
#include <pcl/io/pcd_io.h>
#include <iostream>
int main(int argc, char **argv)
{
ros::init(argc,argv,"UanBdet");
ros::NodeHandle nh;
ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2>("pcl_output",1);
pcl::PointCloud<pcl::PointXYZRGB> cloud;
sensor_msgs::PointCloud2 output;
pcl::io::loadPCDFile("/home/zxy/map/result.pcd",cloud);
//读取文件绝对路径.
//对点云坐标做变换,绕x轴旋转90度,将z轴指向上方
//octomap_server,它的坐标系是定义z轴向上的,得到栅格地图是默认投影到xy平面
Eigen::Affine3f transform = Eigen::Affine3f::Identity();
transform.rotate(Eigen::AngleAxisf(M_PI/2, Eigen::Vector3f(1,0,0)));
pcl::transformPointCloud(cloud, cloud, transform);
pcl::toROSMsg(cloud,output);
output.header.frame_id = "odom1";
ros::Rate loop_rate(1);
while(ros::ok())
{
pcl_pub.publish(output);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
1-2 CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(pcd_to_rviz)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
)
catkin_package()
find_package(PCL 1.7 REQUIRED)
include_directories(
${catkin_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS}
)
add_executable(pcd_to_rviz src/pcd_to_rviz.cpp)
target_link_libraries(pcd_to_rviz
${PCL_LIBRARIES}
${catkin_LIBRARIES})
1-3 package.xml
<build_depend>libpcl-all-dev</build_depend>
<exec_depend>libpcl-all</exec_depend>
2、编译运行
2-1 编译
catkin_make -DCATKIN_WHITELIST_PACKAGES="pcd_to_rviz"
//只编译该功能包
source devel/setup.bash
2-2 运行pcd_to_rviz
rosrun pcd_to_rviz pcd_to_rviz
rostopic list
//点云发布话题/pcl_output

2-3 运行rviz
rviz
2-3-1 修改坐标系 Fixed Frame
2-3-2 Add 添加PointCloud2
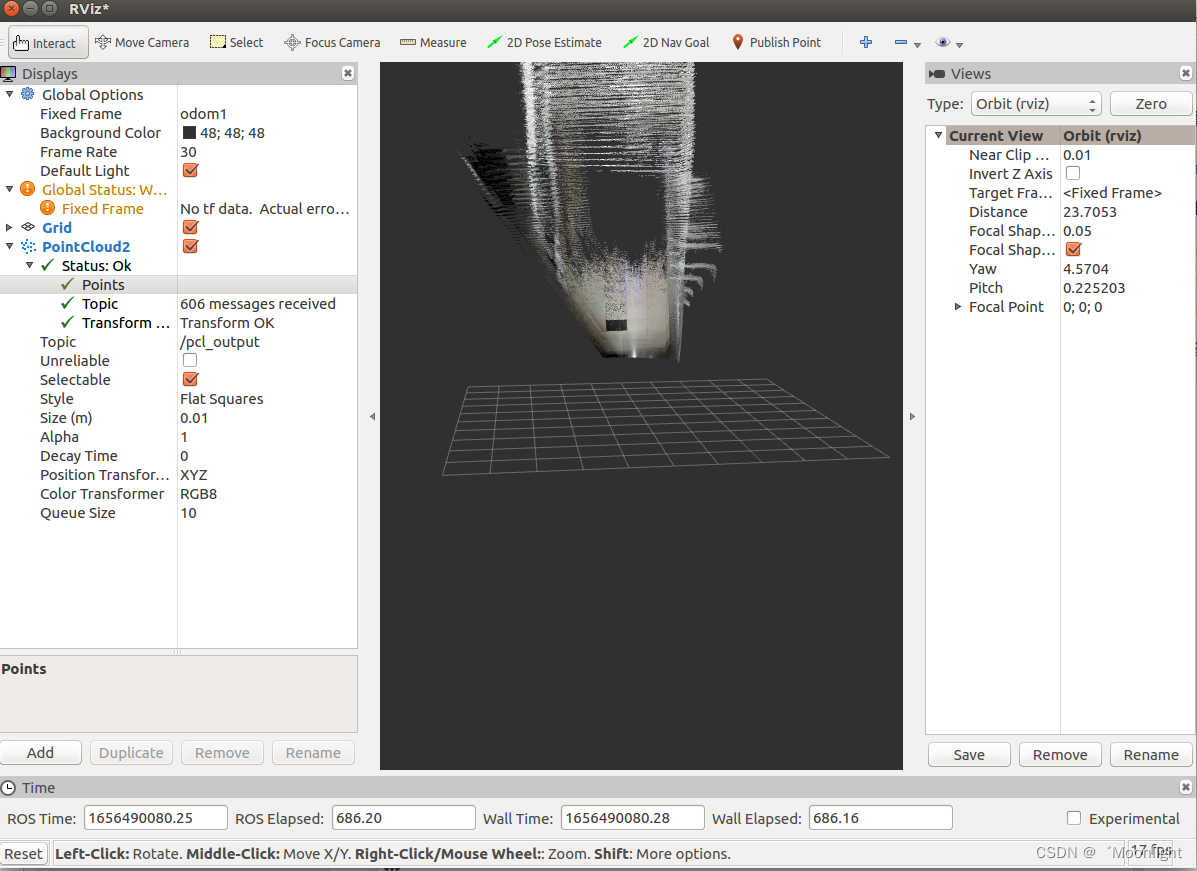
2-3-3 结果图
3 octomap
3-1 安装octomap插件
sudo apt-get install ros-kinetic-octomap-ros
sudo apt-get install ros-kinetic-octomap-msgs
sudo apt-get install ros-kinetic-octomap-server
sudo apt-get install ros-kinetic-octomap-rviz-plugins
3-2 launch文件
octomap.launch
<launch>
<node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<param name="resolution" value="0.1" />
<param name="frame_id" type="string" value="odom1" />
<param name="sensor_model/max_range" value="1000.0" />
<param name="latch" value="true" />
<param name="pointcloud_max_x" value="1000.0" />
<param name="pointcloud_min_x" value="-300.0" />
<param name="pointcloud_max_y" value="1000.0" />
<param name="pointcloud_min_y" value="-300.0" />
<param name="pointcloud_max_z" value="0.5" />
<param name="pointcloud_min_z" value="-3.0" />
<remap from="cloud_in" to="/pcl_output" />
</node>
</launch>
启动octomap
roslaunch octomap.launch
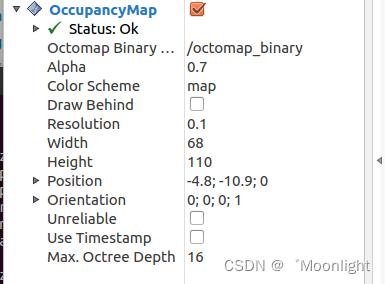
3-3 修改octomap的topic
4 编译问题
pcd_conversionsConfig.cmake
sudo apt-get install ros-kinetic-pcl-conversions















 4737
4737











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









