









前期工作
在ros中已配置Astra plus 并且深度,ir,彩色图像
首先获取依赖项并编译驱动程序
sudo apt install ros-$ROS_DISTRO-camera-calibration
启动相机
source ./devel/setup.bash
roslaunch astra_camera astra_plus.launch
查看发布主题
rostopic list
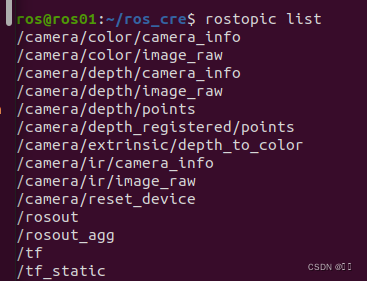
检查是否有 ROS 摄像头驱动程序
这里是
/camera/color/camera_info
/camera/color/image_raw
运行校准节点
加载将要校准的图像主题
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.025 image:=/camera/color/image_raw camera:=/camera --no-service-check
其中 “8x6” 代表棋盘布置
“0.025” 代表小正方形的大小(米)
”image:=/camera/color/image_raw“ 通过rostopic 查看 改成相对应的
代码运行完会出现校准框
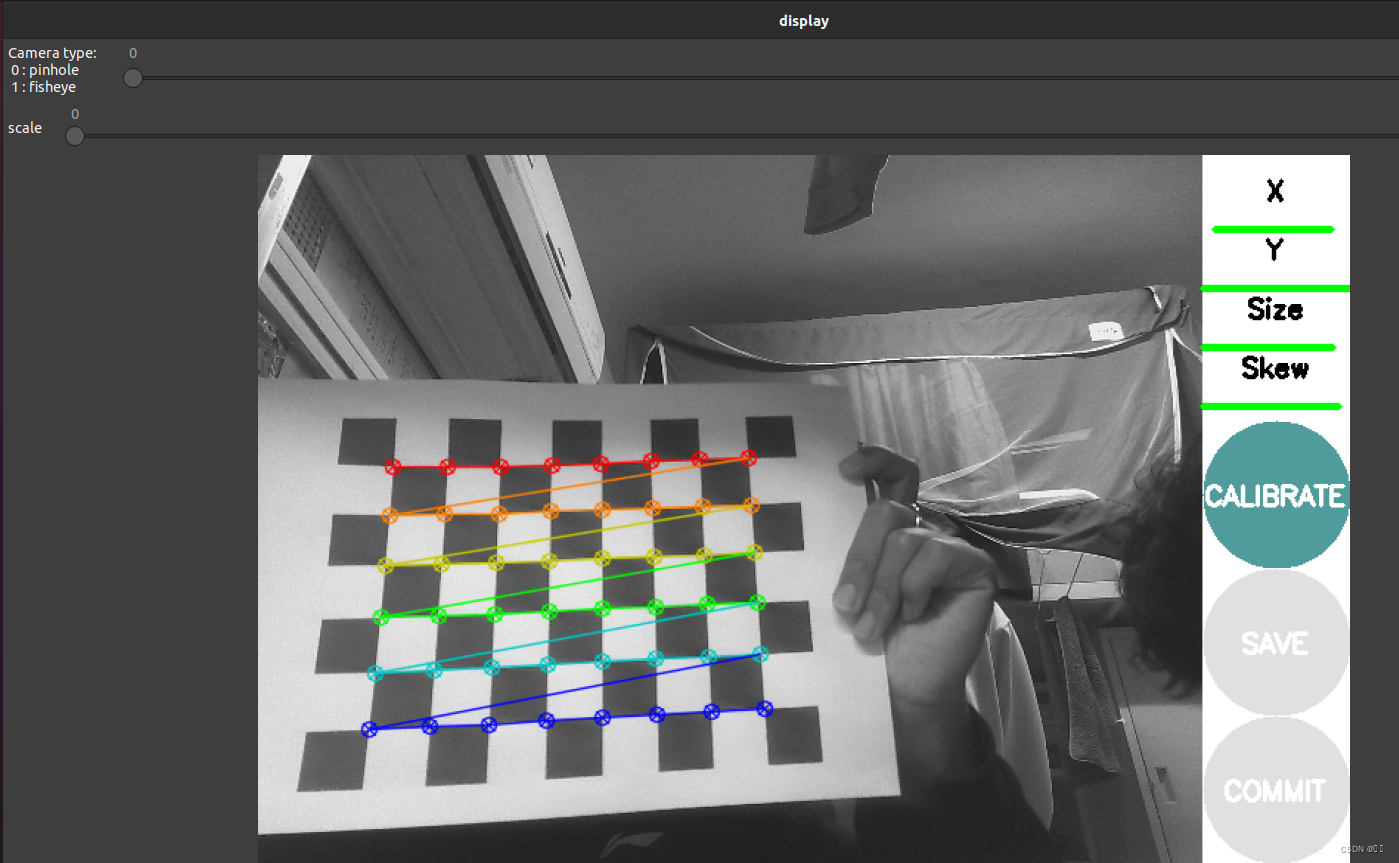
如图所示,移动棋盘,右边的X,Y,Size,Skew为校准进度
棋盘向左、向右、向上和向下倾斜(倾斜)来提高进度(时间勿太长,会导致卡顿)
CALIBRATE 按钮 和X,Y,Size,Skew 都变绿,点击CALIBRATE
等待一段时间(会卡住,正常情况)
SAVE ,COMMIT 变绿后并依次点击
关闭校准框
校准结果会存储在 tmp/calibrationdata.tar.gz 下
cd /tmp
tar -xvzf calibrationdata.tar.gz
将ost.txt文件改名为ost.ini
mv ost.txt ost.ini
rosrun camera_calibration_parsers convert ost.ini camera.yaml
将其保存在~/.ros/camera_info/
mkdir ~/.ros/camera_info
mv camera.yaml ~/.ros/camera_info/


















 2944
2944

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











