










雷达采用架设在tracer_mini机器人上的方式(如果有问题的话。可能是机器人底盘没有传数据,检查can0通信)
首先配置vlp16激光雷达(下载驱动,改连接ip)
GitHub - ros-drivers/velodyne: ROS support for Velodyne 3D LIDARs

velodyne_pointcloud文件夹中launch内的 VLP16_points.launch文件:
<!-- run velodyne_pointcloud/TransformNodelet in a nodelet manager for a VLP-16 -->
<launch>
<!-- declare arguments with default values -->
<arg name="calibration" default="$(find velodyne_pointcloud)/params/VLP16db.yaml"/>
<arg name="device_ip" default="" />
<arg name="frame_id" default="velodyne" />
<arg name="manager" default="$(arg frame_id)_nodelet_manager" />
<arg name="max_range" default="130.0" />
<arg name="min_range" default="0.4" />
<arg name="pcap" default="" />
<arg name="port" default="2369" />
<arg name="read_fast" default="false" />
<arg name="read_once" default="false" />
<arg name="repeat_delay" default="0.0" />
<arg name="rpm" default="600.0" />
<arg name="gps_time" default="false" />
<arg name="pcap_time" default="false" />
<arg name="cut_angle" default="-0.01" />
<arg name="timestamp_first_packet" default="false" />
<arg name="laserscan_ring" default="-1" />
<arg name="laserscan_resolution" default="0.007" />
<arg name="organize_cloud" default="false" />
<!-- start nodelet manager and driver nodelets -->
<include file="$(find velodyne_driver)/launch/nodelet_manager.launch">
<arg name="device_ip" value="$(arg device_ip)"/>
<arg name="frame_id" value="$(arg frame_id)"/>
<arg name="manager" value="$(arg manager)" />
<arg name="model" value="VLP16"/>
<arg name="pcap" value="$(arg pcap)"/>
<arg name="port" value="$(arg port)"/>
<arg name="read_fast" value="$(arg read_fast)"/>
<arg name="read_once" value="$(arg read_once)"/>
<arg name="repeat_delay" value="$(arg repeat_delay)"/>
<arg name="rpm" value="$(arg rpm)"/>
<arg name="gps_time" value="$(arg gps_time)"/>
<arg name="pcap_time" value="$(arg pcap_time)"/>
<arg name="cut_angle" value="$(arg cut_angle)"/>
<arg name="timestamp_first_packet" value="$(arg timestamp_first_packet)"/>
</include>
<!-- start transform nodelet -->
<include file="$(find velodyne_pointcloud)/launch/transform_nodelet.launch">
<arg name="model" value="VLP16"/>
<arg name="calibration" value="$(arg calibration)"/>
<arg name="manager" value="$(arg manager)" />
<arg name="fixed_frame" value="" />
<arg name="target_frame" value="" />
<arg name="max_range" value="$(arg max_range)"/>
<arg name="min_range" value="$(arg min_range)"/>
<arg name="organize_cloud" value="$(arg organize_cloud)"/>
</include>
<!-- start laserscan nodelet -->
<include file="$(find velodyne_pointcloud)/launch/laserscan_nodelet.launch">
<arg name="manager" value="$(arg manager)" />
<arg name="ring" value="$(arg laserscan_ring)"/>
<arg name="resolution" value="$(arg laserscan_resolution)"/>
</include>
</launch>配置完之后
source devel/setup.bash
roslaunch velodyne_pointcloud VLP16_points.launch
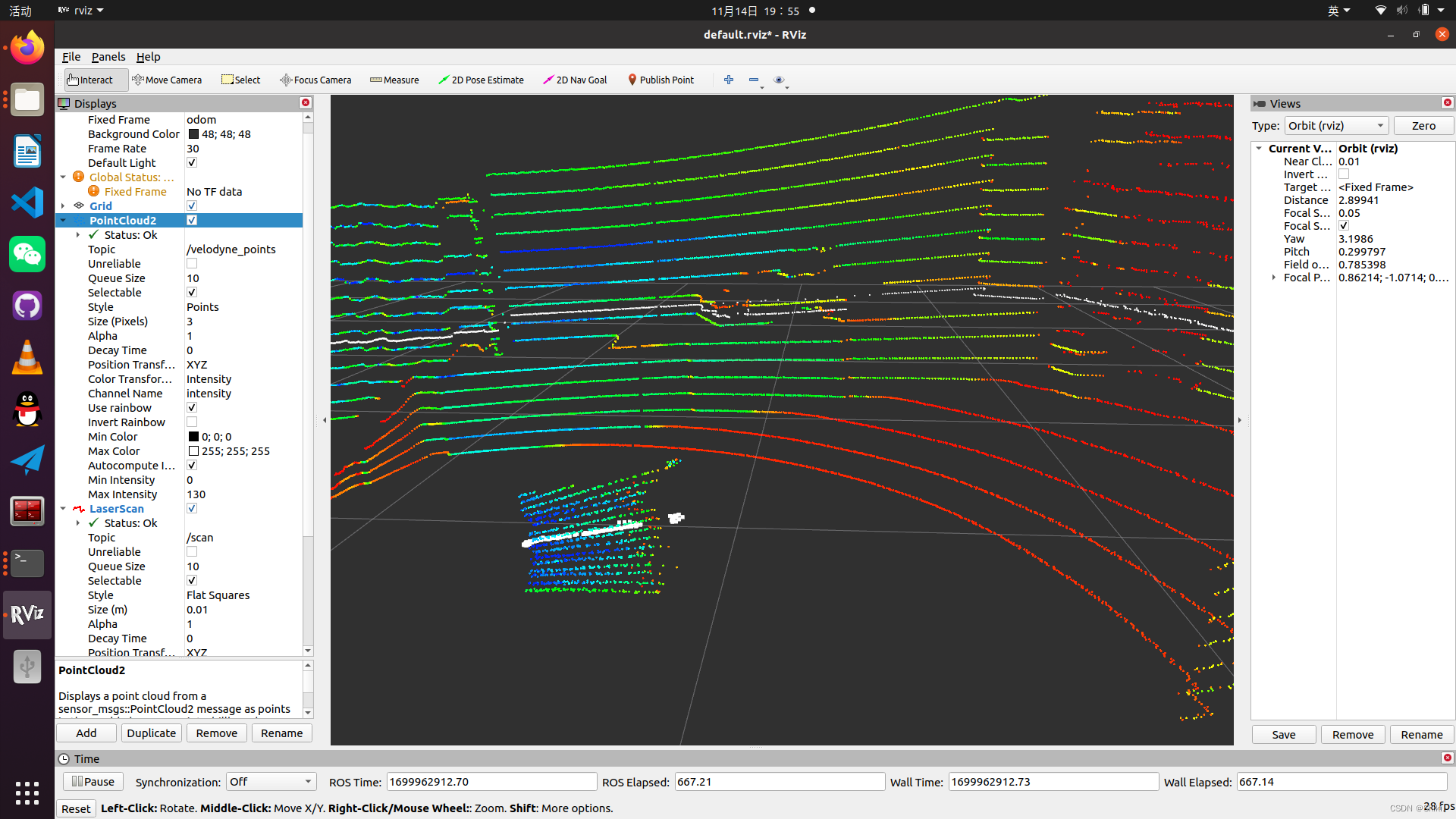
用rviz测试
rosrun rviz rviz -f velodyne
保存录制的bag
rosbag record -a接下来配置将3d激光转为2d scan的包
GitHub - ros-perception/pointcloud_to_laserscan: Converts a 3D Point Cloud into a 2D laser scan.
主要修改的是<remap from="cloud_in" to="/velodyne_points"/> 因为velodyne发布的数据是/velodyne_points;
target_frame: velodyne 这里一般使用vlp16的都是velodyne,可以使用以下命令查询,<topic>换成雷达发布的话题,比如vlp16是/velodyne_points。
rostopic echo <topic> | grep frame_id
这是我的launch文件:
<?xml version="1.0"?>
<launch>
<!--copy from sample_node.launch-->
<!-- run pointcloud_to_laserscan node -->
<node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan">
<remap from="cloud_in" to="/velodyne_points"/>
<rosparam>
target_frame: velodyne # Leave disabled to output scan in pointcloud frame
transform_tolerance: 0.01
min_height: 0.0
max_height: 1.0
angle_min: -3.1415926 # -M_PI
angle_max: 3.1415926 # M_PI
angle_increment: 0.003 # 0.17degree
scan_time: 0.1
range_min: 0.2
range_max: 100
use_inf: true
inf_epsilon: 1.0
# Concurrency level, affects number of pointclouds queued for processing and number of threads used
# 0 : Detect number of cores
# 1 : Single threaded
# 2->inf : Parallelism level
concurrency_level: 1
</rosparam>
</node>
</launch>进行测试,可以看到,3d激光成功变成了2d的scan,便于接下来进行2d的cartographer建图。

接下来进行cartographer的配置
在cartographer_ros下的launch,创建关于vlp16的 比如 vlp16.launch(与文件夹内其他文件不重名) 主要是remap from =“scan” to=“/scan” 这里,/scan是point_to_scan转换出来的数据(在前面图里可以看到/velodyne_points是vlp16发布的数据,/scan是转换后的数据),用于2d建图。这里我引用的是velodyne.lua,如果你要使用其他配置,记得修改-configuration_basename velodyne.lua。
<launch>
<param name="/use_sim_time" value="false" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename velodyne.lua"
output="screen">
<remap from="scan" to="/scan" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
//resolution 0.05 这个参数可以修改,主要是建图时rviz中的分辨率
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
</launch>
接下来是在configuration_files中的velodyne.lua
我主要修改的是这里,
tracking_frame = "velodyne",
published_frame = "velodyne",
因为不涉及imu,所以进行的修改比较简单。
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "velodyne",
published_frame = "velodyne",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.3
TRAJECTORY_BUILDER_2D.max_range = 8.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1
POSE_GRAPH.optimization_problem.huber_scale = 1e2
POSE_GRAPH.optimize_every_n_nodes = 35
POSE_GRAPH.constraint_builder.min_score = 0.65
return options
下面进行建图,成功出图(每次修改launch请重新catkin_make 或者 )
vlp16_ws
source devel/setup.bash
roslaunch velodyne_pointcloud VLP16_points.launch
point2scan_ws
source devel/setup.bash
roslaunch pointcloud_to_laserscan point_to_scan.launch
carto_ws
source install_isolated/setup.bash
roslaunch cartographer_ros vlp16.launch

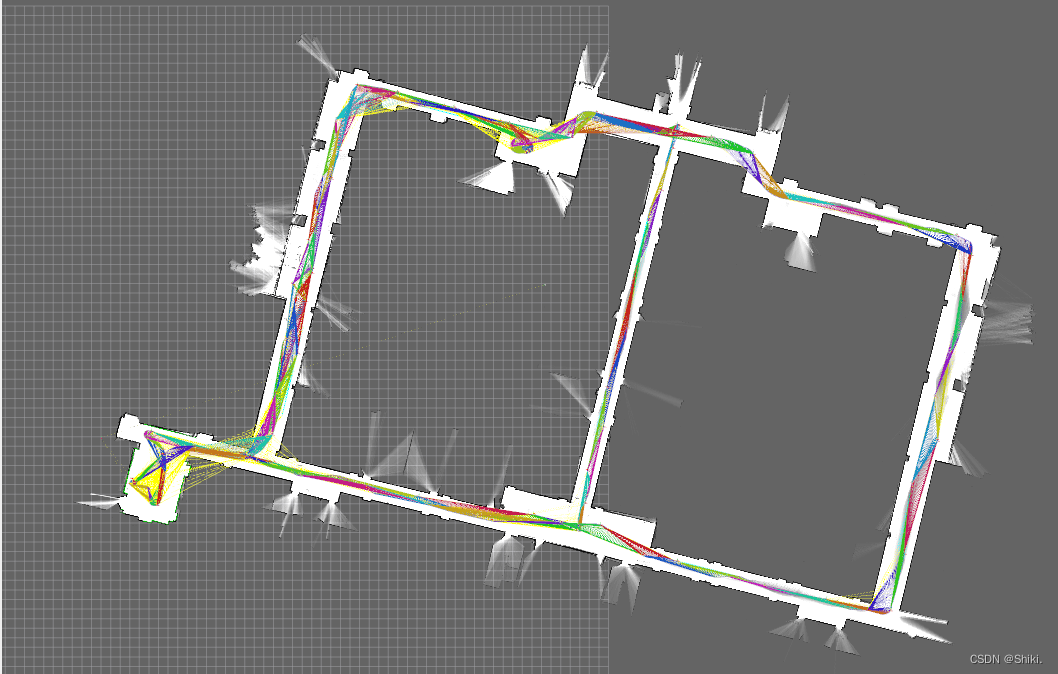
更新,在构建大地图的情况下,Cartographer性能优于Gmapping;
下图为采用Cartographer 2D建图 2000平左右走廊的地图
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









