







1. 串联四足机器人的坐标系的建立方式
由于四个腿对称分布,所以在腿上建立坐标系的方式和规则相同。在四足机器人的机身和单只腿上共需建立8个坐标系:
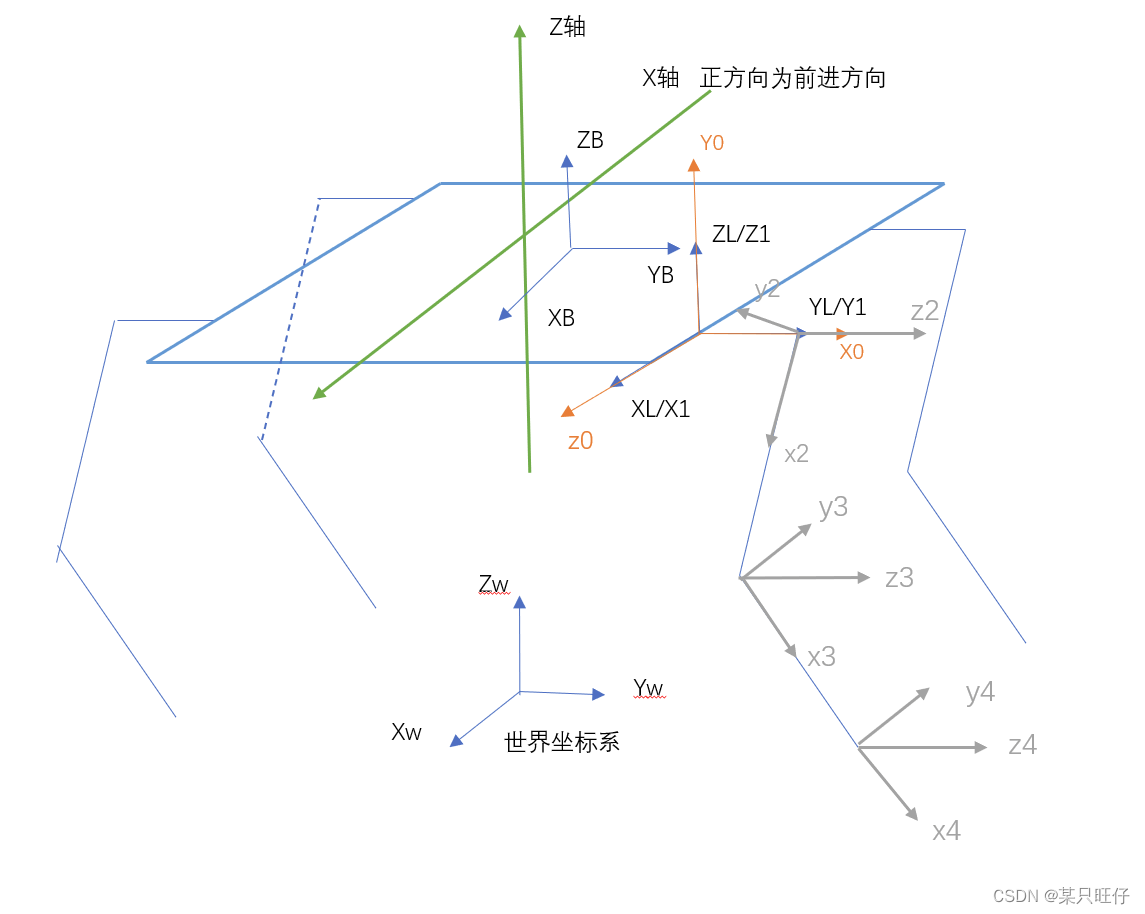
(1)世界坐标系 Xw Yw Zw :
以运动的正方向为x轴的正方向,竖直向上为z轴的正方向 Y轴方向为右手定则标定
(2)机身坐标系 XB YB ZB :
跟随机身运动的坐标系 ,x轴始终与机身平行,指向机身前进方向,z轴与机身垂直指向上方,y轴方向符合右手定则标定
(3)单腿绝对坐标系 XL YL ZL:
其作用为表示单腿在机身坐标系下的定位
(4)单腿基坐标系 X0 Y0 Z0 :
主要用来描述腿的初始状态,简化运动学正逆解 ;坐标系方向可以任意,但为方便起见,与单腿绝对坐标系方向保持一致
(5) 侧摆关节坐标系 X1 Y1 Z1 :
Z轴指向侧摆关节轴向,x轴指向髋关节,y轴方向符合右手定则标定
(6) 髋关节坐标系 X2 Y2 Z2 :
Z轴指向髋关节轴向,x轴指向膝关节,y轴方向符合右手定则标定
(7) 膝关节坐标系 X3 Y3 Z3 :
Z轴指向膝关节轴向,x轴指向足端,y轴方向符合右手定则标定
(8) 足端坐标系 X4 Y4 Z4 :
与膝关节坐标系方向保持一致
未完待续

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









