






环境搭配
1.Ubuntu20.04 搭载 ROS1,没有安装的可以去“鱼香ROS”官网一键安装下载。
2.在Unbuntu下载.bag数据集
运行.bag数据集
1.查看.bag数据集信息
rosbag info 路径/包的名字.bag在使用ros指令之前,先在终端输入“roscore” 再打开一个终端执行上述代码。
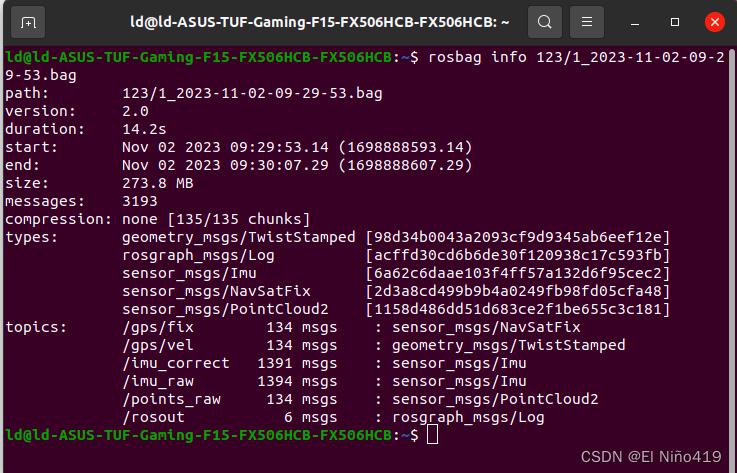
注意倒数第二行结尾“Cloud2”前面的“/points_raw”,这个一会会用到。
2.运行.bag数据集
在运行.bag数据集之前需要先在新终端中打开rviz
rosrun rviz rviz在rviz界面左下角点击add

在此界面下滑找到“PointCloud2”
添加后界面如下
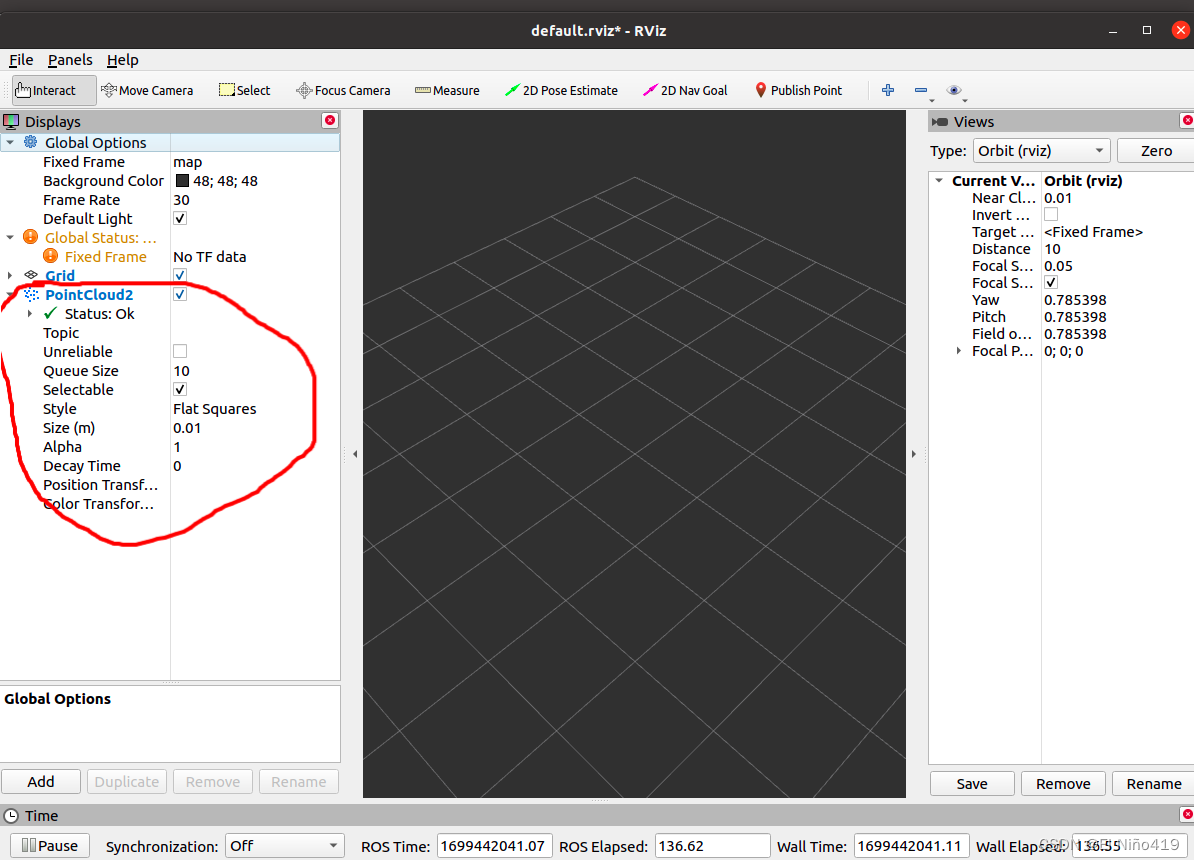
我们需要在Topic栏添加相应的话题。
此时,运行.bag数据集
rosbag play 路径/包的名字.bag 
运行后返回rviz界面,在Topic那一栏选择points_raw
注意!!!一定要在上述代码运行中选择

选择完成后,再次运行代码,观察rviz界面。
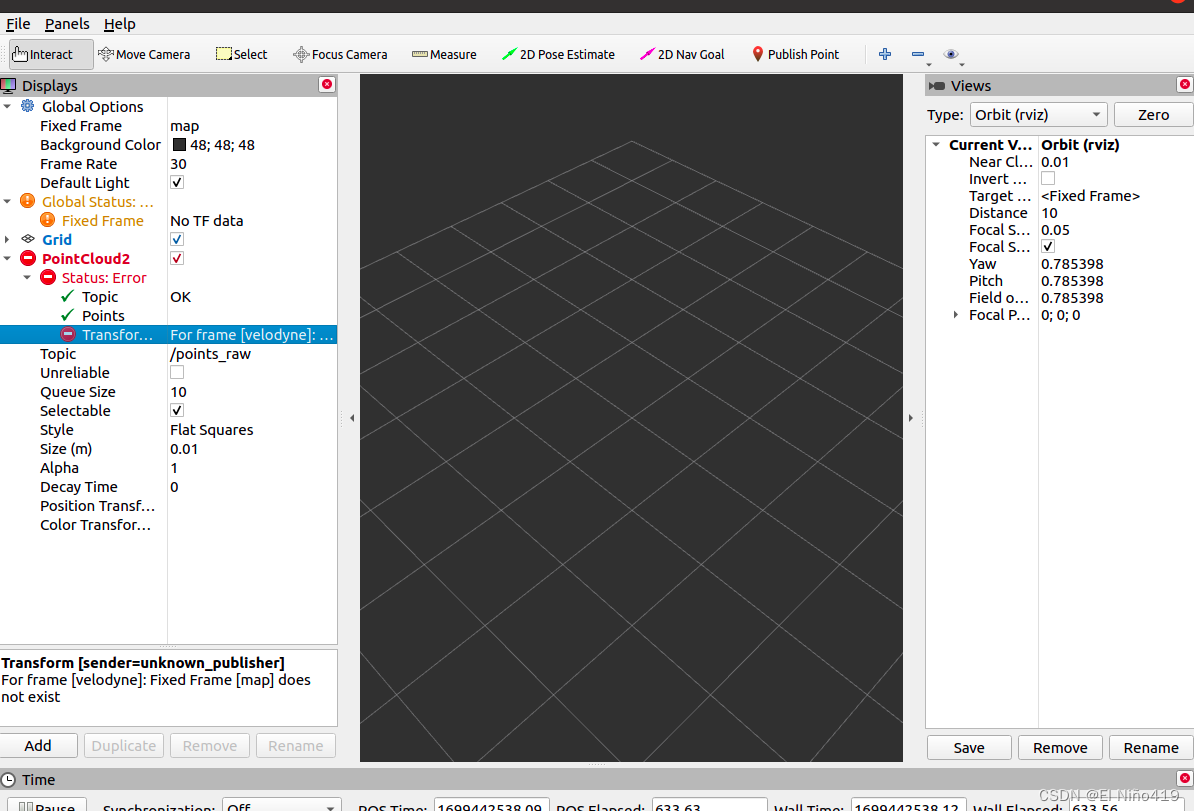
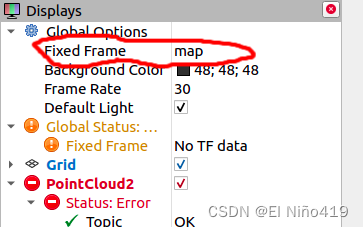
发现并没有出现点云图。
查看错误处,左下角显示Fixed frame中“map”出现错误,因此我们需要修改Fixed frame参数。
3.修改Fixed frame参数
首先我们要获取.bag数据集的信息,需要使用rostopic echo指令。
rostopic echo /话题指令所要读取的话题就是rviz界面Topic后的内容。
按下回车后,回到运行.bag数据集的终端,再次运行代码
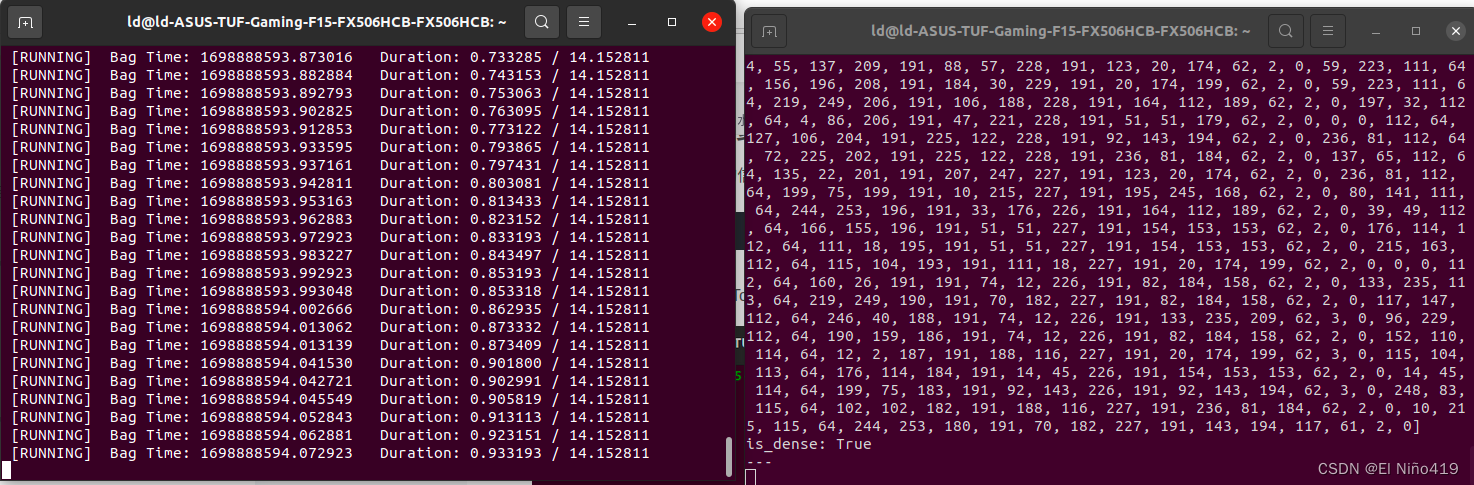
此时两个终端同时运行,不过在rostopic终端中显示很多数字,并没有我们需要的Fixed frame信息。
我们需要用rostopic echo --noarr /话题
rostopic echo --noarr /话题
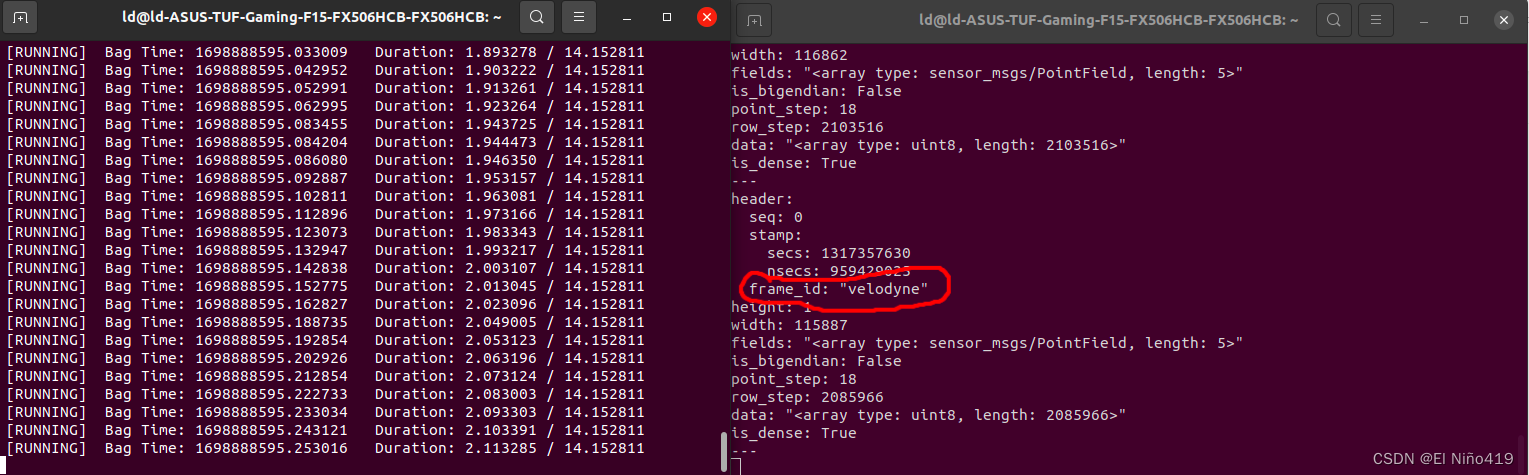
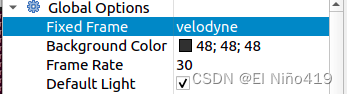
frame_ld:显示的内容就是我们要在Fixed Frame要修改的。
修改后。















 295
295











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









