







1、git clone https://github.com/pal-robotics/aruco_ros.git
2、catkin_make
报错:
(1)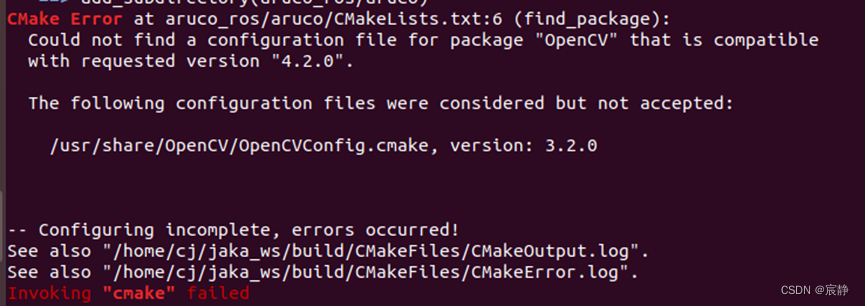
解决:
找到该位置:aruco_ros/aruco/CMakeLists.txt:6
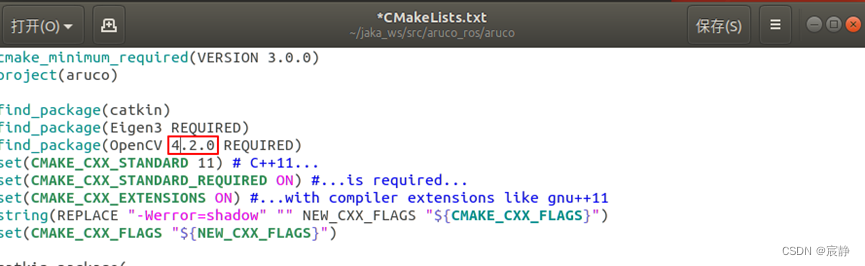
改成3.2.0
3、成功
报错:
(1)
解决:
找到该位置:aruco_ros/aruco/CMakeLists.txt:6
改成3.2.0
 689
3444
4699
1240
689
3444
4699
1240

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






























