






双臂复合升降机器人的手眼标定是属于眼在手外的标定模式,相机在机器人的头部,标定前应固定相机的位置,再打开我们的标定软件程序如下,给足文件权限后,打开主程序,运行后会出现如下界面。
首次连接,选择机械臂型号,填入机械臂ip,选择标定模式,以及测量标定板的参数后填入,点击连接设备如下。

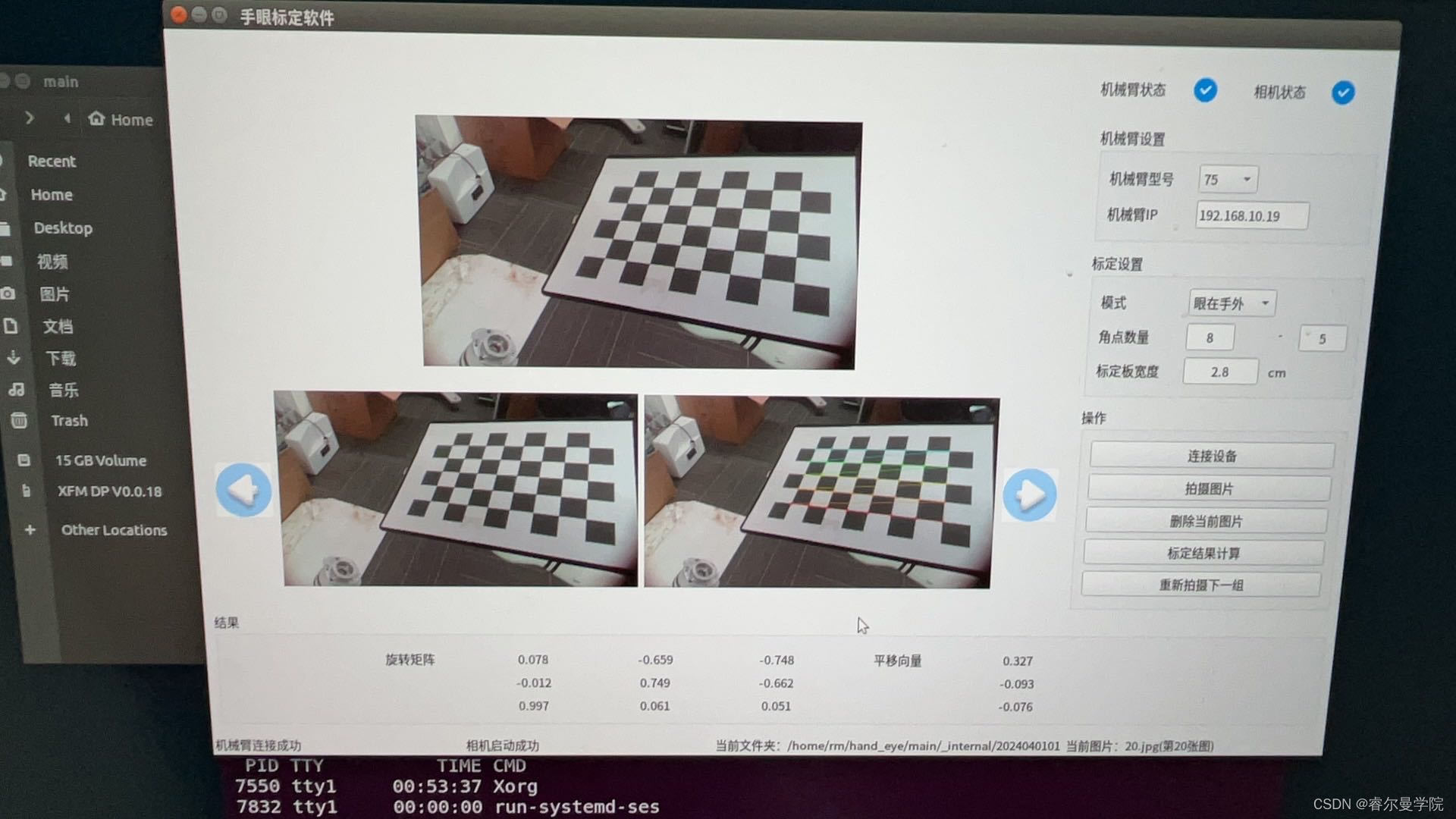
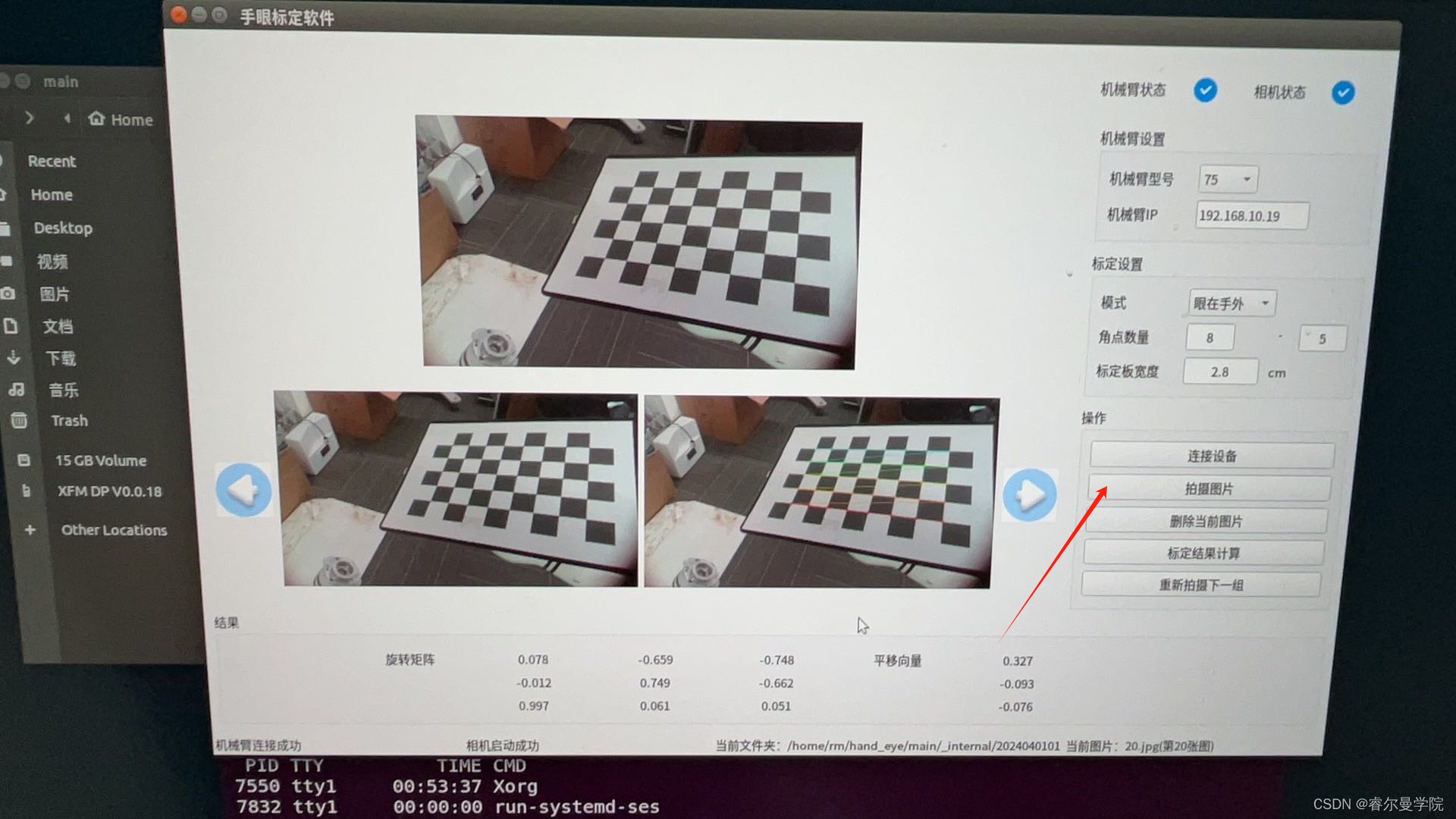
接下来将标定板固定在机械臂的末端,可以贴在灵巧手背面,然后进行图片的获取,变换不通的姿态,保证标定板在摄像头视野内部,然后点击拍摄图片进行图像获取。
获取20张图像后可选择15张获取比较好的进行标定
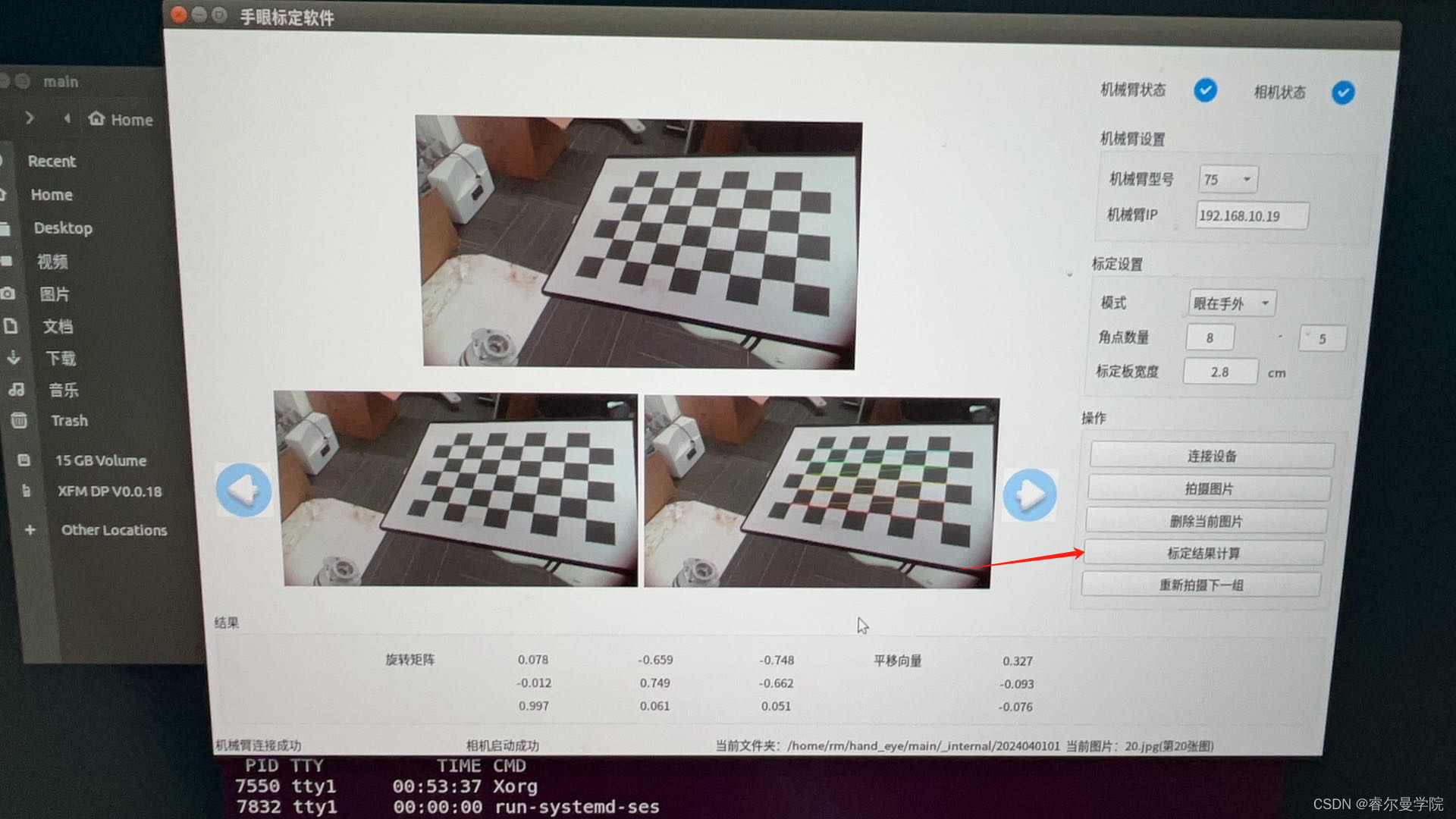
标定完成后会在下面计算出旋转矩阵和偏移向量如下
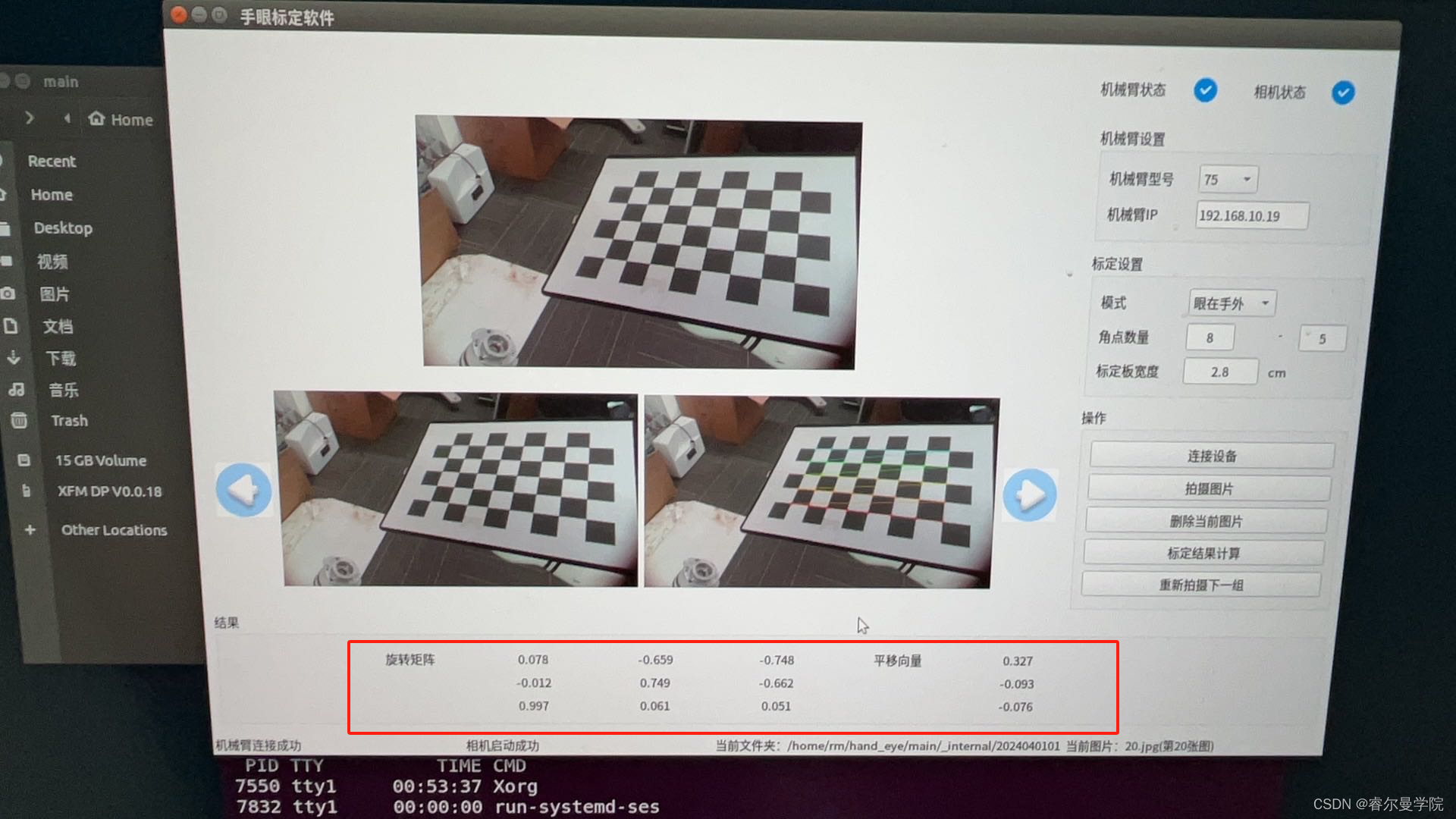
到此,我们的双臂复合机器人的手眼标定完成,

















 1163
1163

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









