







标定过程
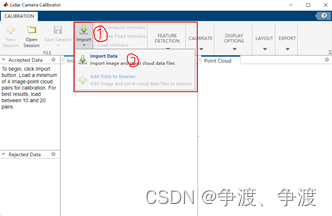
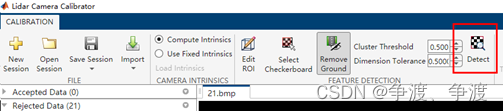
标定数据导入matlab lidar camara calibrator 插件,点击图示中的Import后选择Import Data如图所示:
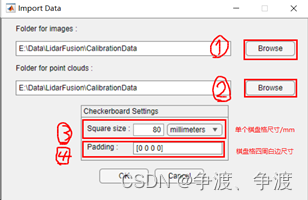
依次选择导入图像和点云数据如下后点击“确定”:
Matlab会自动导入数据并计算相机内参,然后开始进行相机和点云数据的处理,并进行自动标定,但自动标定结果一般较差,会提示没有探测到目标,这都是正常现象。
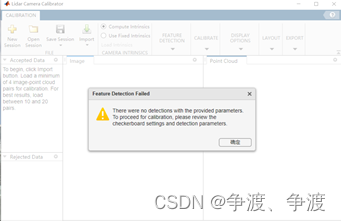
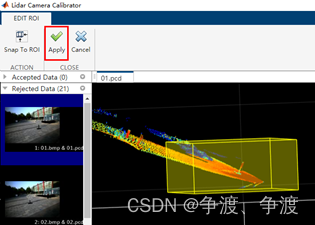
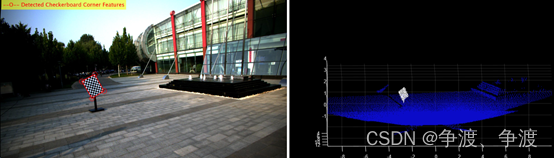
需要进行手动调整后就能精确标定。点击“确定”后调整过程如下。首先选择Edit ROI,也就是划定一个棋盘格(标定板)的范围,不用太大,能将所有采样的标定板包含在内就行,如图所示。

然后进行区域的调整如下所示,然后点击“应用”即可:(旋转和选定框的调整还是有一定难度的,多试试就好)
 然后先调整好Dimension Tolerance,适当调整大一些然后选择Select Checkerboard选择标定板的点云,需要将每一组数据的点云都选择好。
然后先调整好Dimension Tolerance,适当调整大一些然后选择Select Checkerboard选择标定板的点云,需要将每一组数据的点云都选择好。
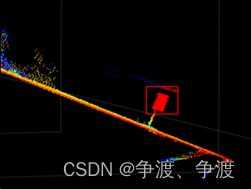
 调整一个比较好的姿态,使用图中的“小刷子”便可以进行点云选择,画框就可以选了。选完之后被选中的点云会变成红色,尽可能的只选择标定板的点云,这样标定结果更加准确,如下图所示。
调整一个比较好的姿态,使用图中的“小刷子”便可以进行点云选择,画框就可以选了。选完之后被选中的点云会变成红色,尽可能的只选择标定板的点云,这样标定结果更加准确,如下图所示。
 点击左上角“Apply”后回到插件主页,然后点击“Detect”等会儿就可以了。
点击左上角“Apply”后回到插件主页,然后点击“Detect”等会儿就可以了。
然后点击“标定”(Calibrate)即可
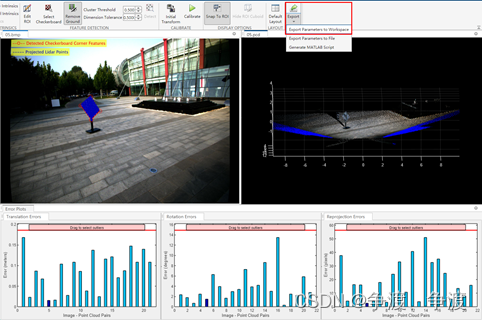
 得到标定结果如下:能看出标定板上覆盖了蓝色的点云,点云数据中也赋上了图片中的颜色,包括地砖的颜色,左下角为每幅图标定的标定误差,中间为像素误差,右边为重建误差。然后点击“导出”Export导出标定参数。
得到标定结果如下:能看出标定板上覆盖了蓝色的点云,点云数据中也赋上了图片中的颜色,包括地砖的颜色,左下角为每幅图标定的标定误差,中间为像素误差,右边为重建误差。然后点击“导出”Export导出标定参数。
 然后点击确定就行。
然后点击确定就行。
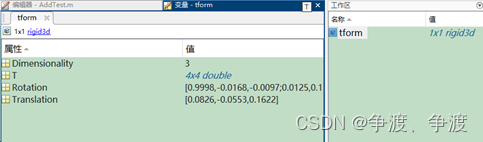
然后在matlab的工作区就能打开结果,这里不知道除了什么问题,之前会有很多标定数据,包括标定的相机内参都会显示出来,这次不知道是卡了还是哪里设置的不对,欢迎大神指教。这里的变量T就是外参矩阵。
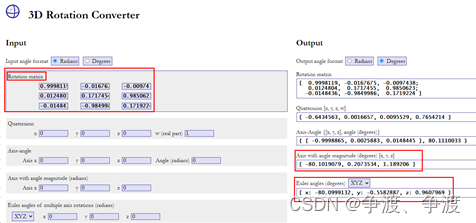
 可以在这个网站将矩阵导入,然后就可以看出相机和雷达之间的欧拉角等信息。https://www.andre-gaschler.com/rotationconverter/如下:
可以在这个网站将矩阵导入,然后就可以看出相机和雷达之间的欧拉角等信息。https://www.andre-gaschler.com/rotationconverter/如下:
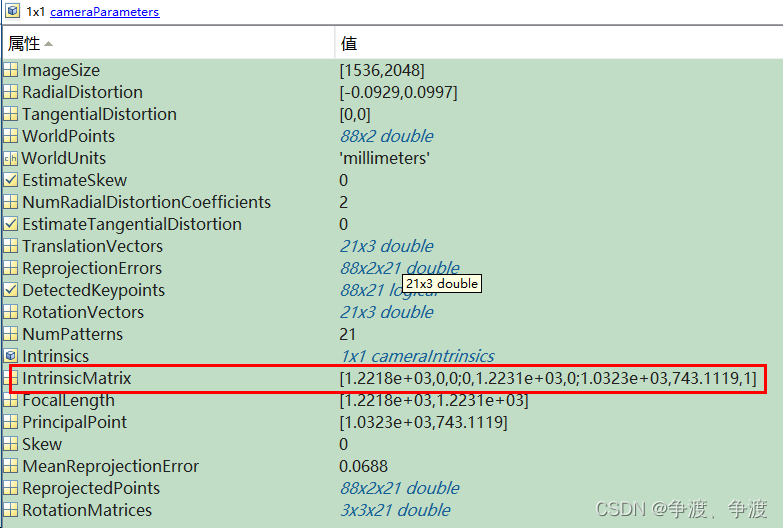
相机内参标定跟这个比较相似,用的插件是Camara Calitrator,获得的结果导出后如下IntrinsicMatrix就是内参矩阵。

















 5722
5722

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









