






相机标定(Camera calibration)是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵 P的过程。在传统的相机模型中共有4种坐标系,标定的过程分为两个部分:
第一步:从世界坐标系转换为相机坐标系,这一步是三维点到三维点的转换,包括R,t(相机外参)等参数;
第二步:从相机坐标系转为图像坐标系,这一步是三维点到二维点的转换,包括K(相机内参)等参数;
相机标定:
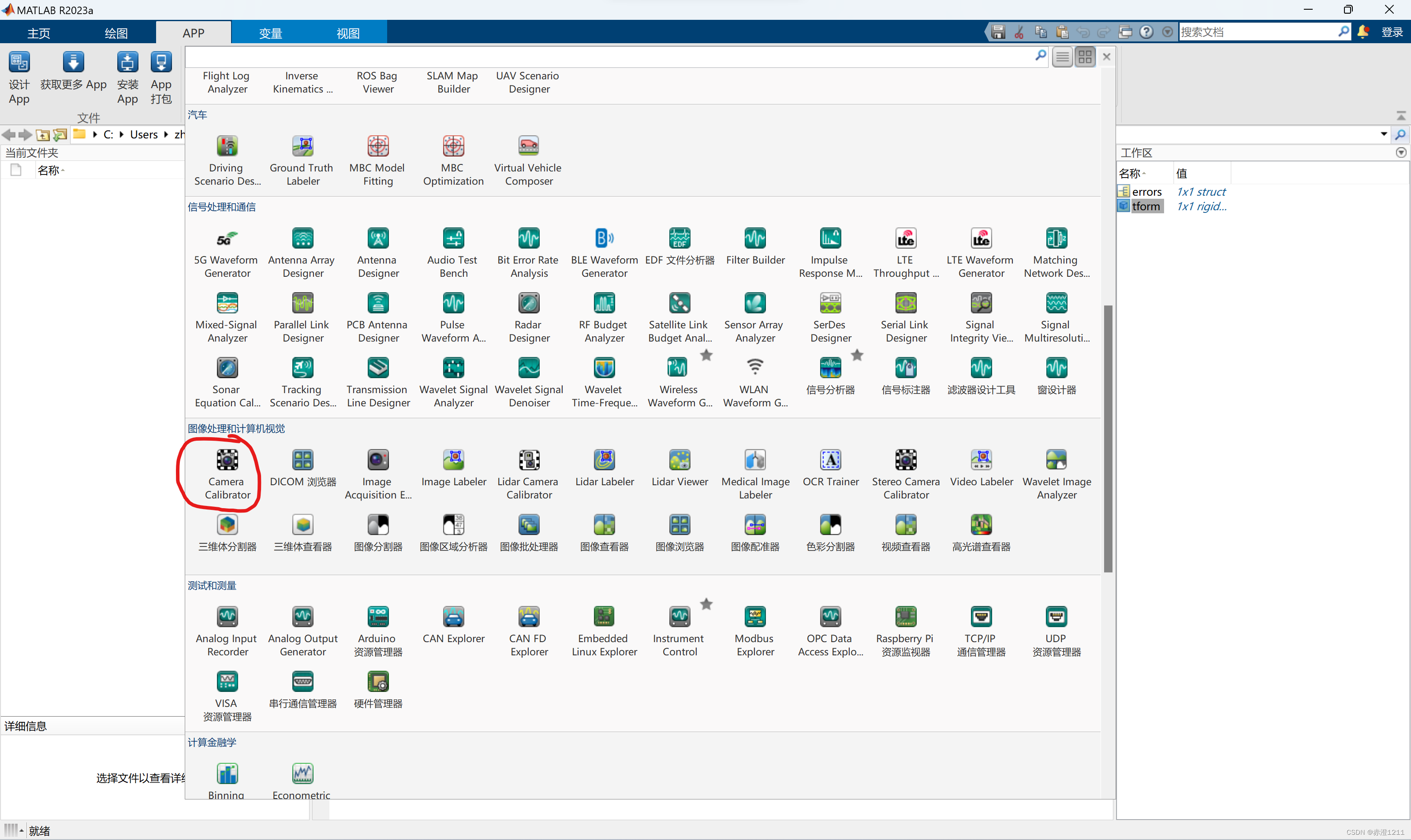
第一步:我使用的是8M像素的长焦摄像机,所以机变可能会比较高,用相机配上标定板拍上20张左右的照片,存到一个文件夹里,然后打开Matlab在App中选择Camera Calibrator
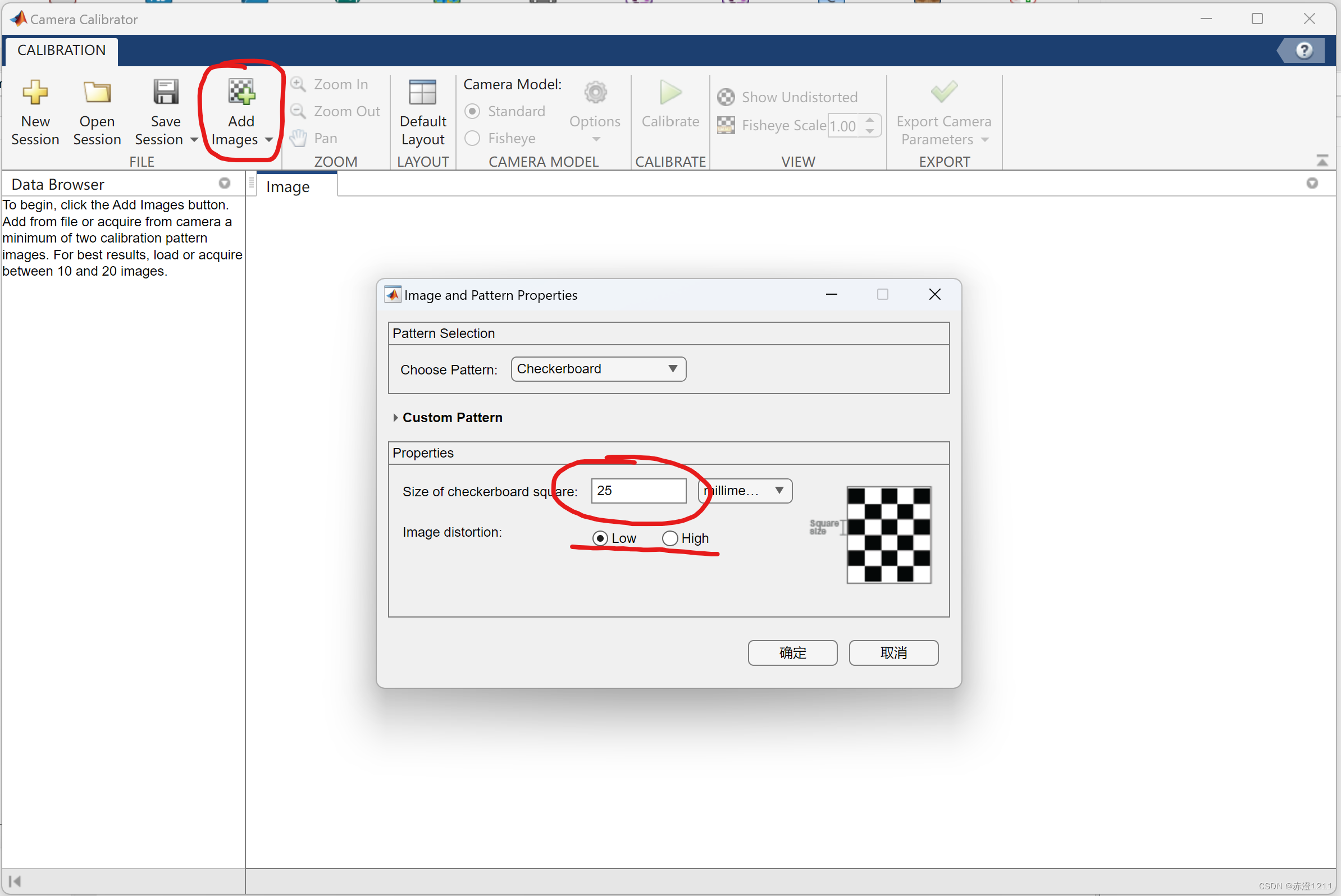
第二步:点击添加图片,把拍好的照片导入
导入的时候会弹出一个小窗口让你确定棋盘格的长度是多少,单位一般都是default多少毫米,我们的是200,image distortion就是图像的扭曲度,因为我这次用的已经是机变很严重的长焦相机了,多以选择low。
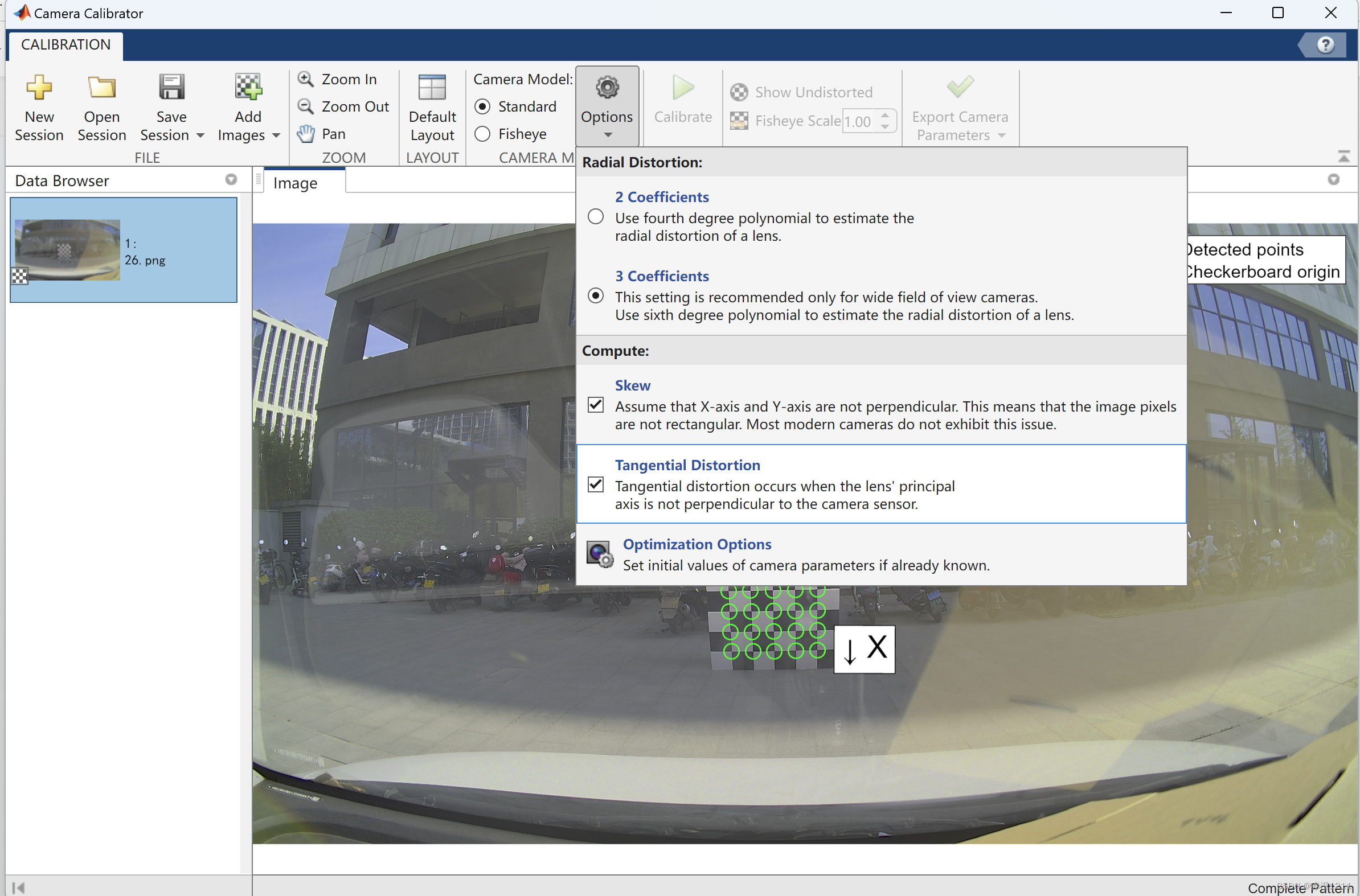
第三步:点击上方工具栏options,选定三阶切向畸变和斜切
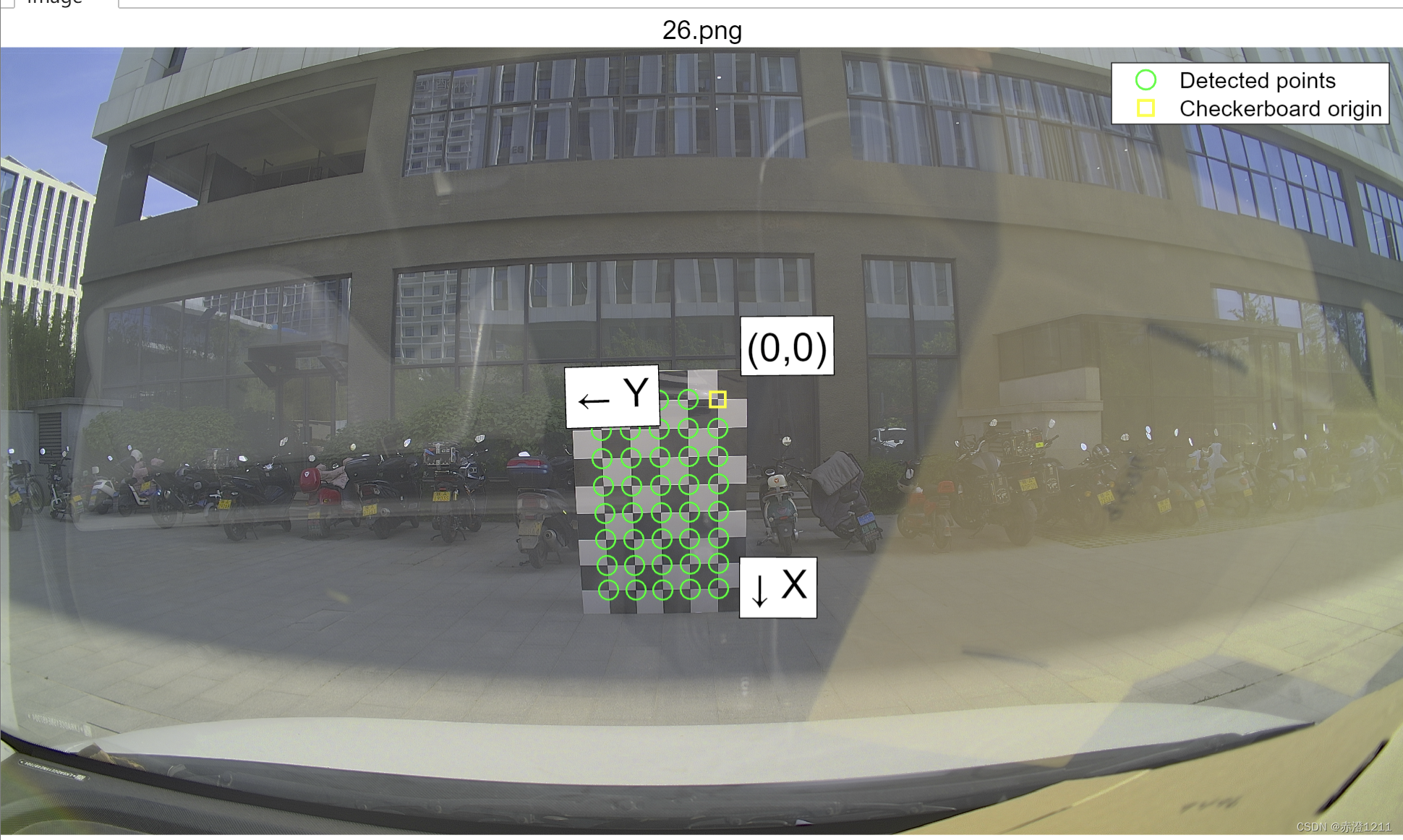
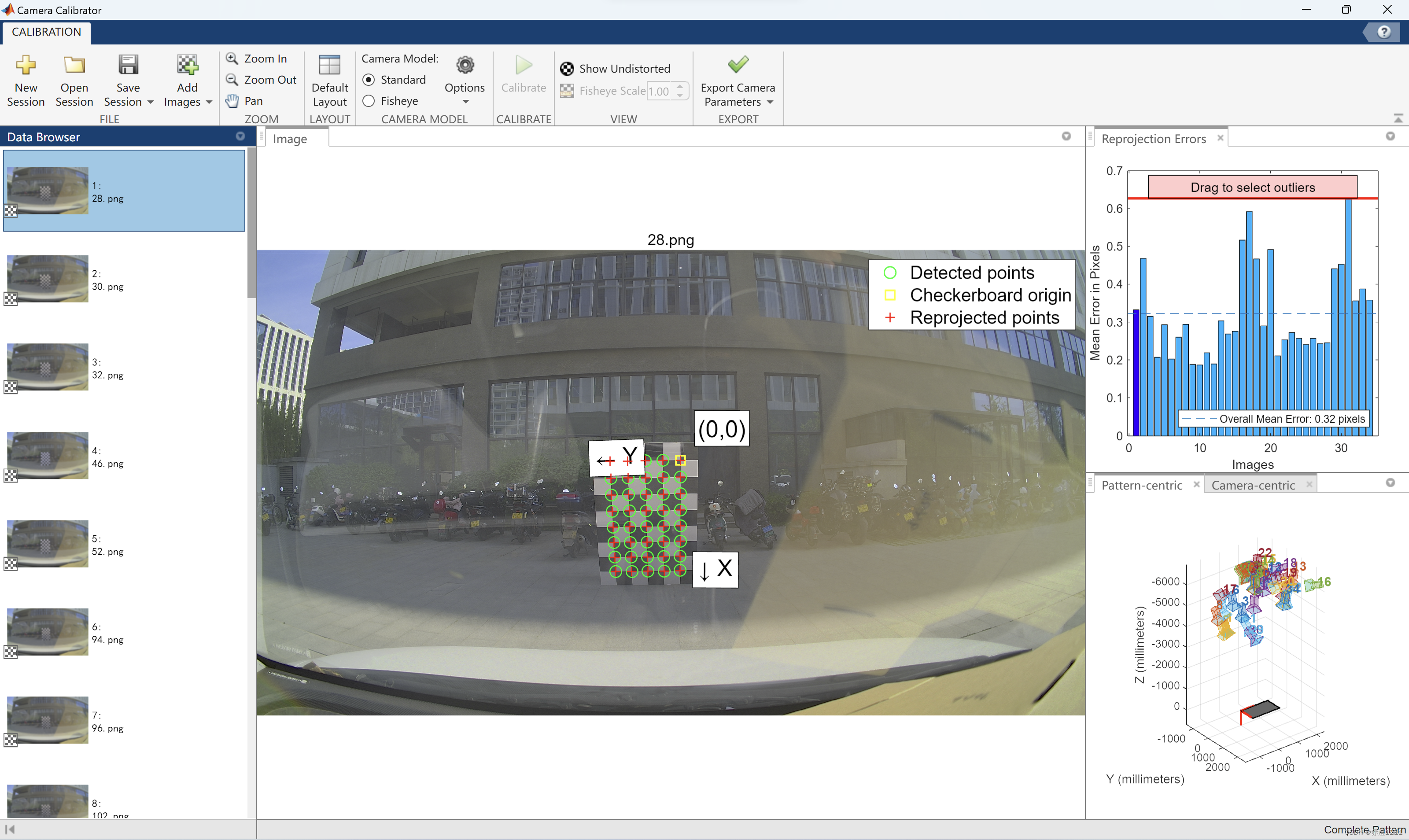
第四步:仔细检查左边添加的每一张图片,去除坐标轴X,Y轴相反或坐标原点选错的图片。尽量选择如下图所示的原点离最外侧差一行,且所有的内部的(除最外面那一圈的)都被标定,然后点击绿色的三角形,matlab会自动进行相机标定
第五步:标定完成后,就会生成很多柱状图,同时会有一个虚线显示平均投影误差,一般都要在0.5以下,如果太高的直接remove就好。
右上角是重建平均误差,只要平均误差小于0.5,就可以认为这是相机标定的结果是可靠的
筛选完后,点击绿色的 √ 子,进行导出,导出的时候一般会选择error打勾
然后回到Matlab主页
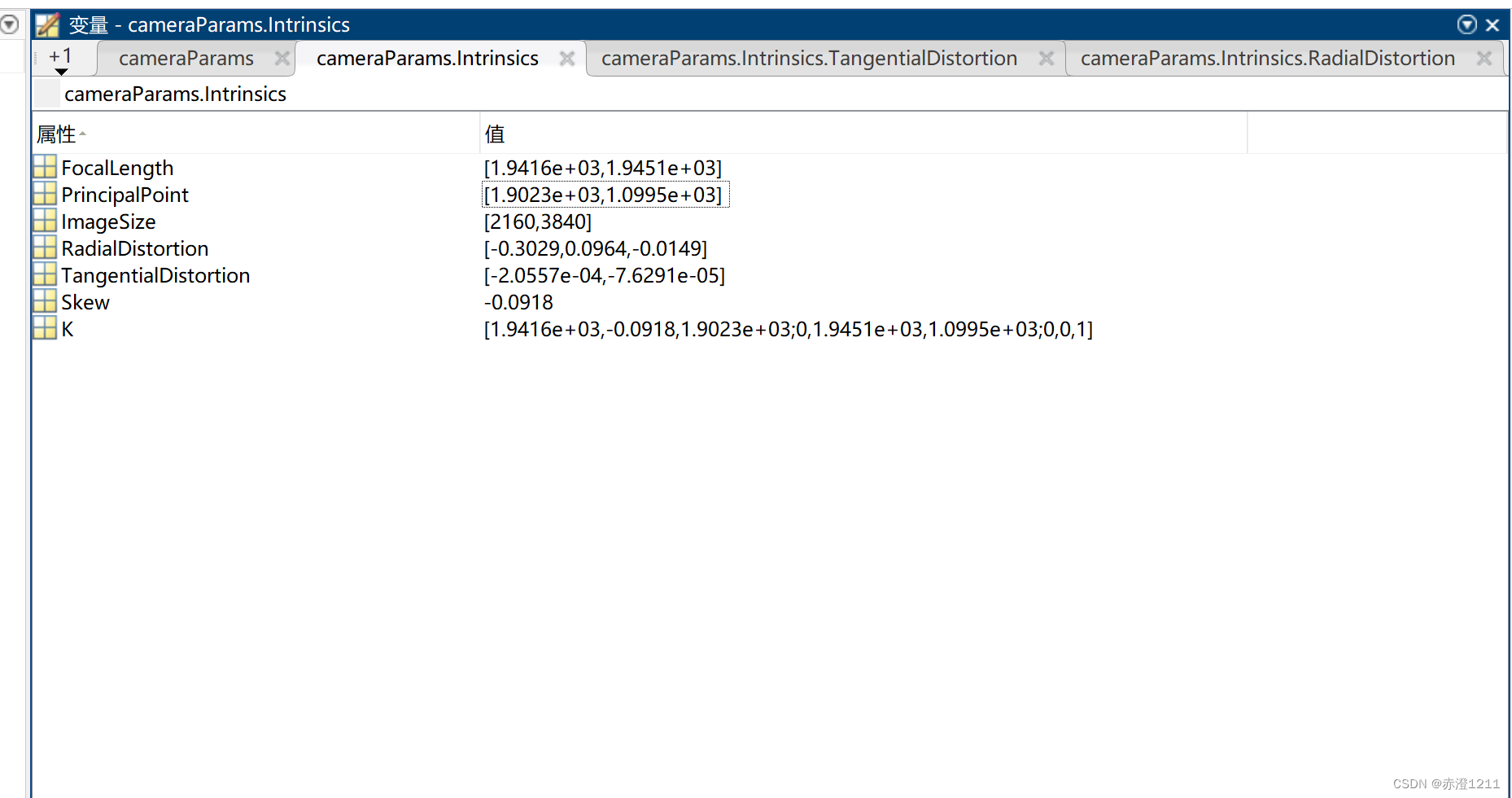
一般来说RadialDistortion和TangentialDistortion还有K就是我们所需要的数据。
当然也可以依次输入下面的代码:
format long
cameraParams.IntrinsicMatrix
cameraParams.RadialDistortion
cameraParams.TangentialDistortion计算p1,p2的值

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









