







1.为什么要进行激光雷达和相机的联合标定?
激光雷达和相机的联合标定是为了将两种传感器的数据统一到同一坐标系中,从而实现更准确的环境感知。激光雷达提供精准的三维距离信息,而相机捕捉丰富的纹理和颜色,通过联合标定可以结合两者优势,弥补单一传感器的不足。标定过程确定激光雷达与相机之间的相对位置和姿态,支持多传感器融合任务,如目标检测、三维重建和语义分割,提高系统的感知精度和鲁棒性,是自动驾驶和机器人导航中不可或缺的一环。
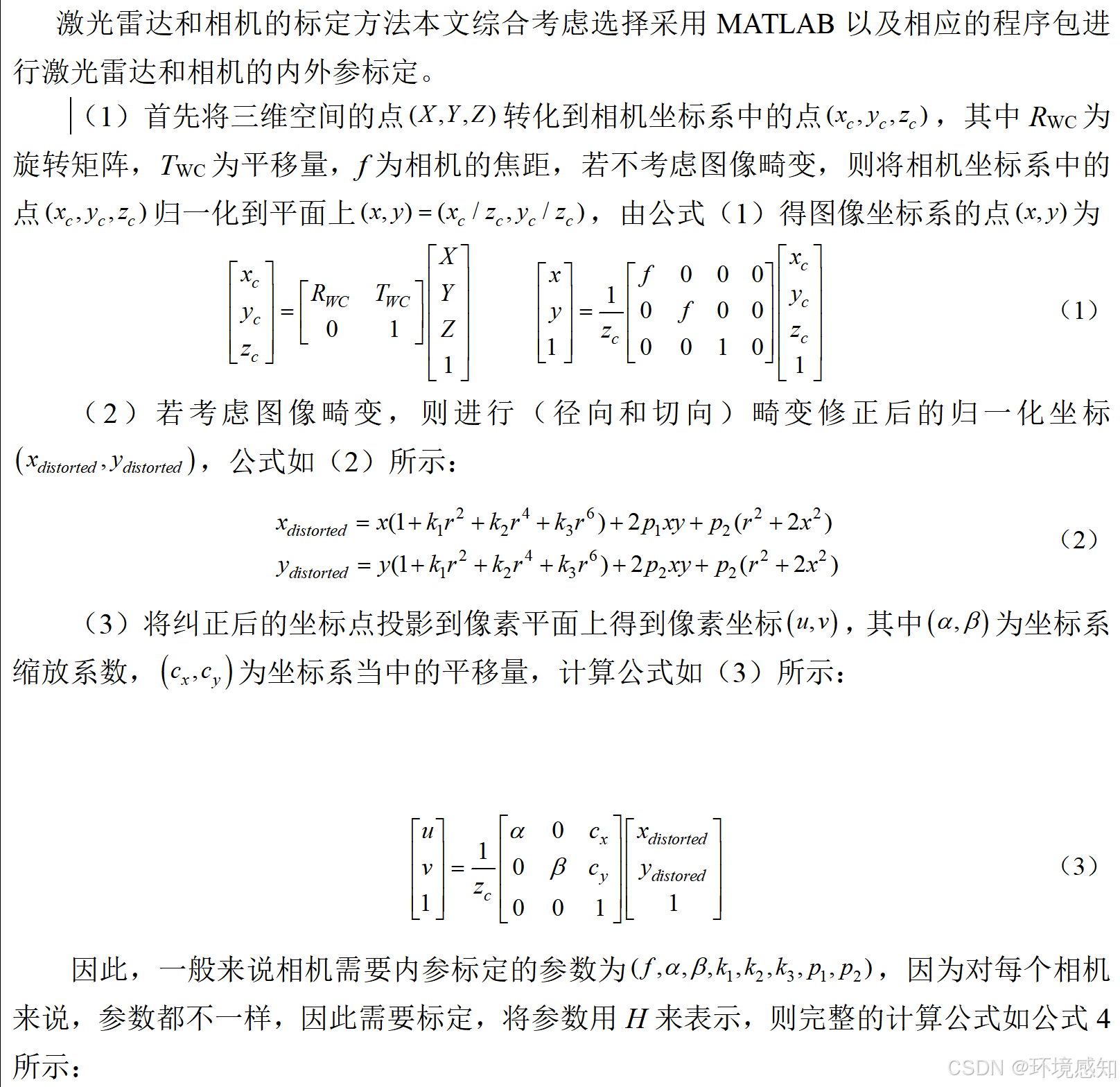
2.激光雷达和相机联合标定的原理是什么?
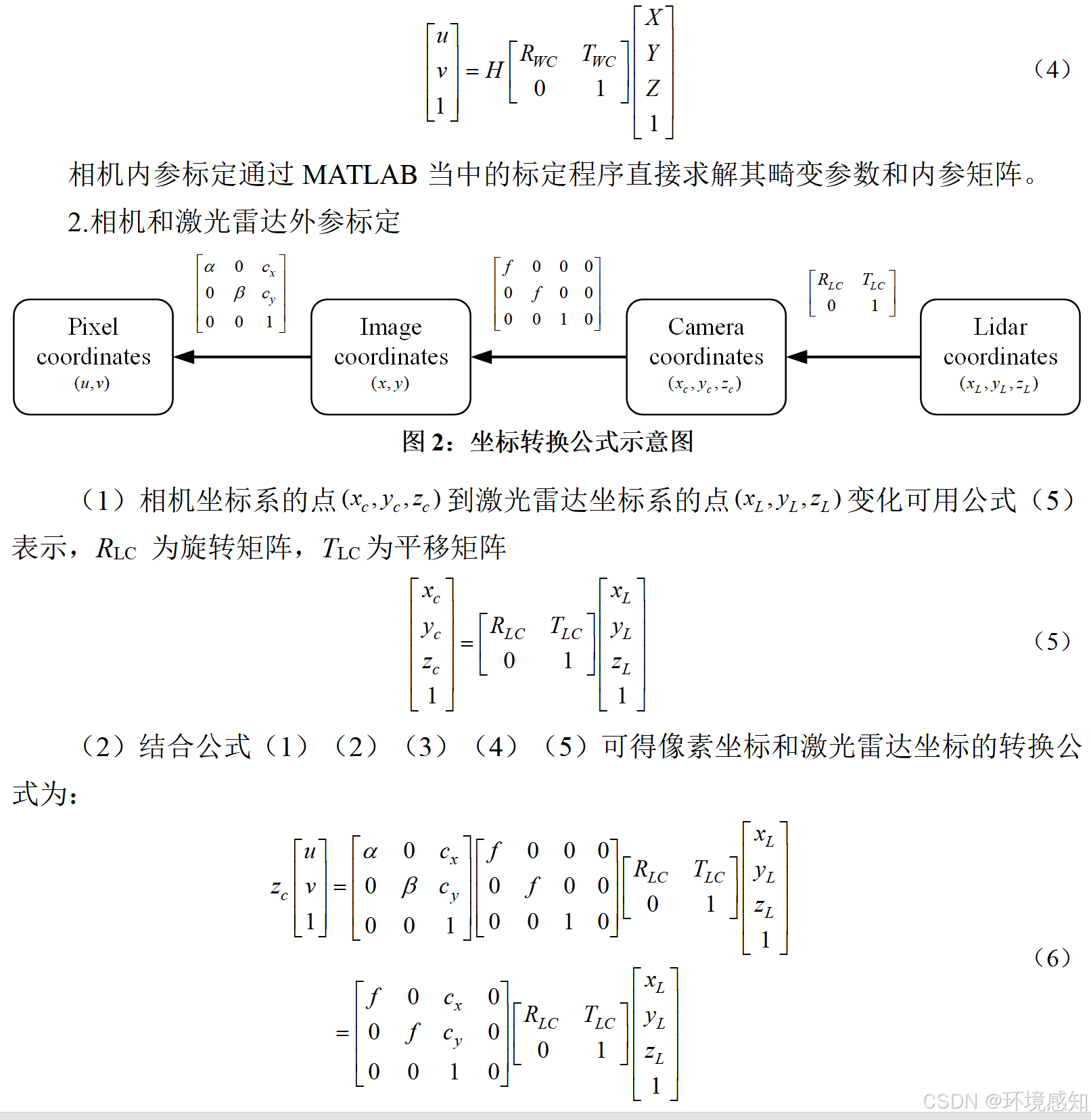
所以一般相机和激光雷达的联合标定就是要求其旋转矩阵和平移矩阵。大概就是这个过程,如果有不太清楚的,同时又想进一步研究的可以参考这个博客:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1968
1968

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









