







windows 11
pcl 1.12.1
推荐安装1.11.1版本
vs 2019
安装 包下载
https://github.com/PointCloudLibrary/pcl/releases

下载目录
打开exe






弹出来的

把这个文件里面的所有东西移到F:\PCL 1.12.1\bin

在配置的时候发现没有OpenNI2 双击框里面的文件安装

安装好以后就是这样
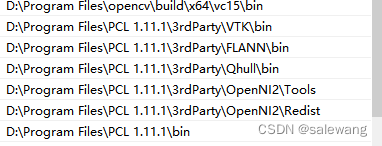
系统环境变量
右键1 新建 右键2 C/C++ -> 常规 -> 附加包含目录(添加头文件目录)


链接器 -> 常规 -> 附加库目录(添加链接文件目录)

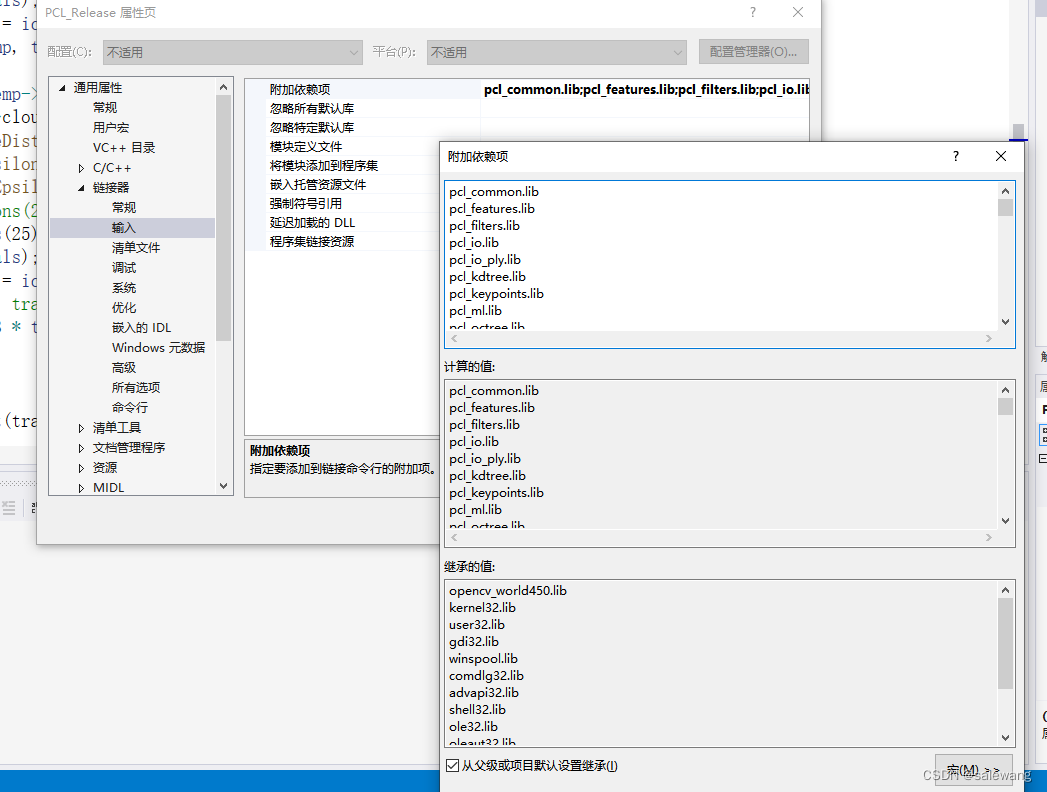
链接器 -> 输入 -> 附加依赖项
对一下版本
vtkcgns-9.1.lib
vtkChartsCore-9.1.lib
vtkCommonColor-9.1.lib
vtkCommonComputationalGeometry-9.1.lib
vtkCommonCore-9.1.lib
vtkCommonDataModel-9.1.lib
vtkCommonExecutionModel-9.1.lib
vtkCommonMath-9.1.lib
vtkCommonMisc-9.1.lib
vtkCommonSystem-9.1.lib
vtkCommonTransforms-9.1.lib
vtkDICOMParser-9.1.lib
vtkDomainsChemistry-9.1.lib
vtkDomainsChemistryOpenGL2-9.1.lib
vtkdoubleconversion-9.1.lib
vtkexodusII-9.1.lib
vtkexpat-9.1.lib
vtkFiltersAMR-9.1.lib
vtkFiltersCore-9.1.lib
vtkFiltersExtraction-9.1.lib
vtkFiltersFlowPaths-9.1.lib
vtkFiltersGeneral-9.1.lib
vtkFiltersGeneric-9.1.lib
vtkFiltersGeometry-9.1.lib
vtkFiltersHybrid-9.1.lib
vtkFiltersHyperTree-9.1.lib
vtkFiltersImaging-9.1.lib
vtkFiltersModeling-9.1.lib
vtkFiltersParallel-9.1.lib
vtkFiltersParallelImaging-9.1.lib
vtkFiltersPoints-9.1.lib
vtkFiltersProgrammable-9.1.lib
vtkFiltersSelection-9.1.lib
vtkFiltersSMP-9.1.lib
vtkFiltersSources-9.1.lib
vtkFiltersStatistics-9.1.lib
vtkFiltersTexture-9.1.lib
vtkFiltersTopology-9.1.lib
vtkFiltersVerdict-9.1.lib
vtkfmt-9.1.lib
vtkfreetype-9.1.lib
vtkGeovisCore-9.1.lib
vtkgl2ps-9.1.lib
vtkglew-9.1.lib
vtkhdf5-9.1.lib
vtkhdf5_hl-9.1.lib
vtkImagingColor-9.1.lib
vtkImagingCore-9.1.lib
vtkImagingFourier-9.1.lib
vtkImagingGeneral-9.1.lib
vtkImagingHybrid-9.1.lib
vtkImagingMath-9.1.lib
vtkImagingMorphological-9.1.lib
vtkImagingSources-9.1.lib
vtkImagingStatistics-9.1.lib
vtkImagingStencil-9.1.lib
vtkInfovisCore-9.1.lib
vtkInfovisLayout-9.1.lib
vtkInteractionImage-9.1.lib
vtkInteractionStyle-9.1.lib
vtkInteractionWidgets-9.1.lib
vtkIOAMR-9.1.lib
vtkIOAsynchronous-9.1.lib
vtkIOCGNSReader-9.1.lib
vtkIOChemistry-9.1.lib
vtkIOCityGML-9.1.lib
vtkIOCONVERGECFD-9.1.lib
vtkIOCore-9.1.lib
vtkIOEnSight-9.1.lib
vtkIOExodus-9.1.lib
vtkIOExport-9.1.lib
vtkIOExportGL2PS-9.1.lib
vtkIOExportPDF-9.1.lib
vtkIOGeometry-9.1.lib
vtkIOHDF-9.1.lib
vtkIOImage-9.1.lib
vtkIOImport-9.1.lib
vtkIOInfovis-9.1.lib
vtkIOIOSS-9.1.lib
vtkIOLegacy-9.1.lib
vtkIOLSDyna-9.1.lib
vtkIOMINC-9.1.lib
vtkIOMotionFX-9.1.lib
vtkIOMovie-9.1.lib
vtkIONetCDF-9.1.lib
vtkIOOggTheora-9.1.lib
vtkIOParallel-9.1.lib
vtkIOParallelXML-9.1.lib
vtkIOPLY-9.1.lib
vtkIOSegY-9.1.lib
vtkIOSQL-9.1.lib
vtkioss-9.1.lib
vtkIOTecplotTable-9.1.lib
vtkIOVeraOut-9.1.lib
vtkIOVideo-9.1.lib
vtkIOXML-9.1.lib
vtkIOXMLParser-9.1.lib
vtkjpeg-9.1.lib
vtkjsoncpp-9.1.lib
vtkkissfft-9.1.lib
vtklibharu-9.1.lib
vtklibproj-9.1.lib
vtklibxml2-9.1.lib
vtkloguru-9.1.lib
vtklz4-9.1.lib
vtklzma-9.1.lib
vtkmetaio-9.1.lib
vtknetcdf-9.1.lib
vtkogg-9.1.lib
vtkParallelCore-9.1.lib
vtkParallelDIY-9.1.lib
vtkpng-9.1.lib
vtkpugixml-9.1.lib
vtkRenderingAnnotation-9.1.lib
vtkRenderingContext2D-9.1.lib
vtkRenderingContextOpenGL2-9.1.lib
vtkRenderingCore-9.1.lib
vtkRenderingFreeType-9.1.lib
vtkRenderingGL2PSOpenGL2-9.1.lib
vtkRenderingImage-9.1.lib
vtkRenderingLabel-9.1.lib
vtkRenderingLOD-9.1.lib
vtkRenderingOpenGL2-9.1.lib
vtkRenderingSceneGraph-9.1.lib
vtkRenderingUI-9.1.lib
vtkRenderingVolume-9.1.lib
vtkRenderingVolumeOpenGL2-9.1.lib
vtkRenderingVtkJS-9.1.lib
vtksqlite-9.1.lib
vtksys-9.1.lib
vtkTestingRendering-9.1.lib
vtktheora-9.1.lib
vtktiff-9.1.lib
vtkverdict-9.1.lib
vtkViewsContext2D-9.1.lib
vtkViewsCore-9.1.lib
vtkViewsInfovis-9.1.lib
vtkWrappingTools-9.1.lib
vtkzlib-9.1.lib
pcl_common.lib
pcl_features.lib
pcl_filters.lib
pcl_io.lib
pcl_io_ply.lib
pcl_kdtree.lib
pcl_keypoints.lib
pcl_ml.lib
pcl_octree.lib
pcl_outofcore.lib
pcl_people.lib
pcl_recognition.lib
pcl_registration.lib
pcl_sample_consensus.lib
pcl_search.lib
pcl_segmentation.lib
pcl_stereo.lib
pcl_surface.lib
pcl_tracking.lib
pcl_visualization.lib
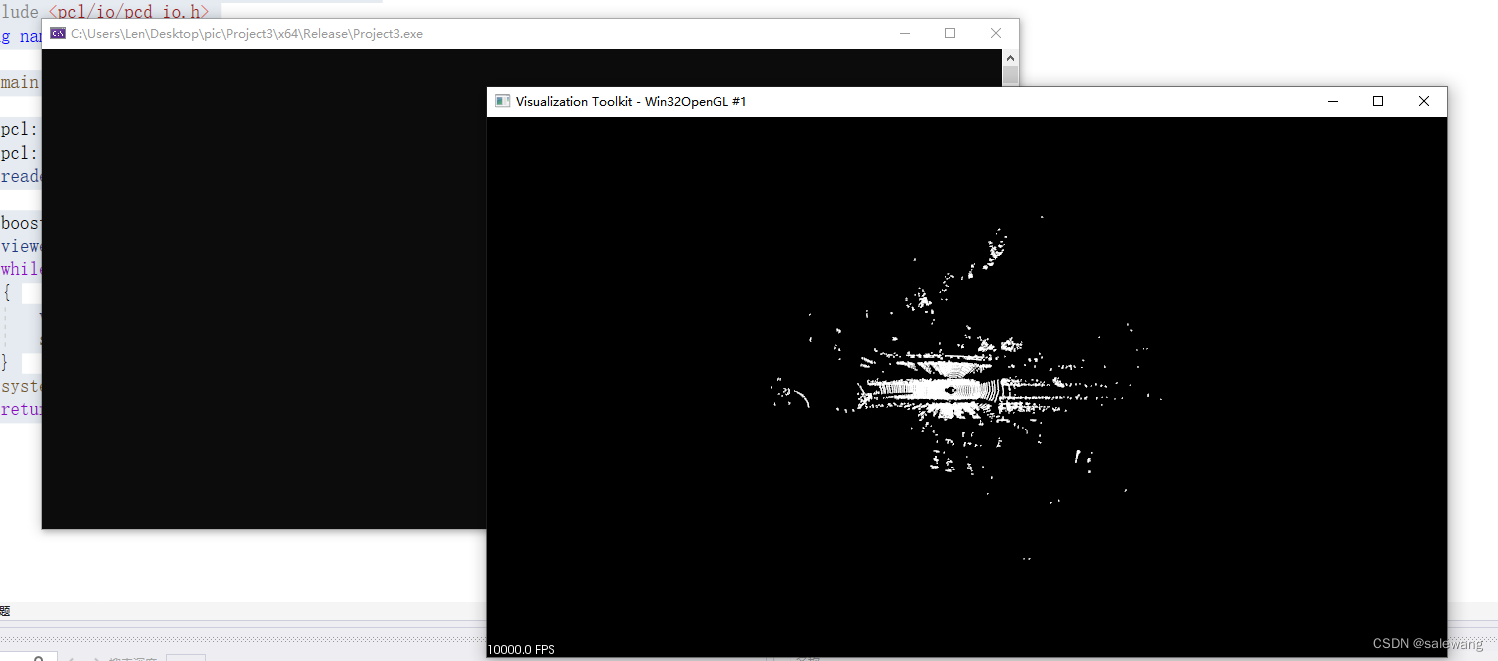
测试代码
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/io/pcd_io.h>
using namespace std;
int main() {
pcl::PCDReader reader;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());
reader.read("1.pcd", *cloud);
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
std::this_thread::sleep_for(std::chrono::microseconds(100000));
}
system("pause");
return 0;
}
链接:https://pan.baidu.com/s/1_uReCH1zUrLq8UGp9MF9_Q?pwd=f5h9
提取码:f5h9
--来自百度网盘超级会员V4的分享
















 873
873











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











