







1.Robosense M1 激光雷达 保姆级教程2——如何设置单播、组播、广播?_小贱来了的博客-CSDN博客
1.Robosense M1 激光雷达 保姆级教程2——如何设置单播、组播、广播?_小贱来了的博客-CSDN博客
2.速腾聚创多激光雷达点云采集,并用RVIZ进行显示_rviz如何显示速腾点云_可见一班的博客-CSDN博客
2.速腾聚创多激光雷达点云采集,并用RVIZ进行显示_rviz如何显示速腾点云_可见一班的博客-CSDN博客
3.RoboSense(速腾)16线激光雷达在windows及Ubuntu18+ROS melodic下的实时数据展示_ubuntu18.04怎么打开rsview_%zoe%的博客-CSDN博客
3.RoboSense(速腾)16线激光雷达在windows及Ubuntu18+ROS melodic下的实时数据展示_ubuntu18.04怎么打开rsview_%zoe%的博客-CSDN博客
4.★速腾(RoboSense)16线激光雷达调试出点云图(Ubuntu1804和windows系统都已经显示点云),包含各种遇见的坑【避坑指南】{[driver][socket]Rslidar poll}
5.Robosense速腾激光雷达如何在线连接雷达并发送点云数据到ROS内容为:
在运行该该篇文章之前请下载rslidar_sdk,编译方式参照文章:Robosense在LIOSAM中的使用中关于rslidar_sdk的编译方式。然后进行以下步骤:
1 获取数据端口号
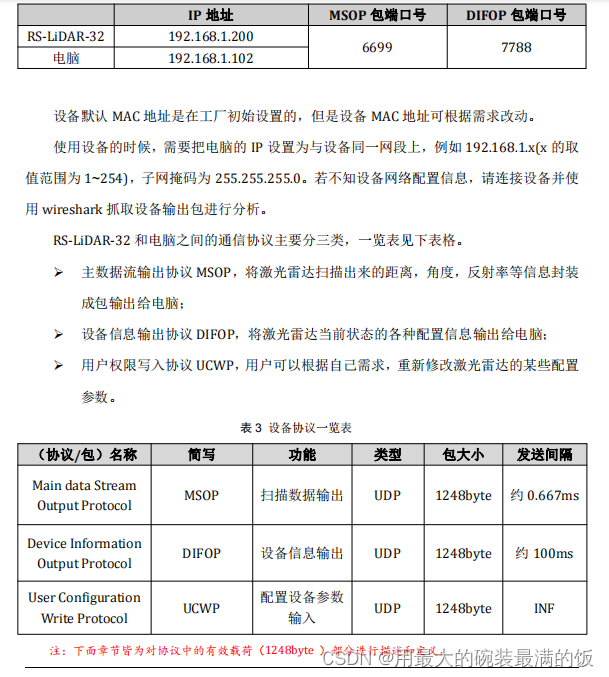
首先根据雷达用户手册连接雷达并设置好您的电脑的IP地址。此时应该已知雷达的msop端口号和difop端口号,默认值为msop-6699, difop-7788。
2 设置参数文件的common部分
common:
msg_source: 1
send_packet_ros: false
send_point_cloud_ros: true
send_packet_proto: false
send_point_cloud_proto: false
pcap_path: /home/robosense/lidar.pcap
由于消息来源于在线雷达,因此设置msg_source=1。
将点云发送到ROS以查看,因此设置 send_point_cloud_ros = true 。
3 设置参数文件的 lidar-driver部分
lidar:
- driver:
lidar_type: RS128
frame_id: /rslidar
msop_port: 6699
difop_port: 7788
start_angle: 0
end_angle: 360
min_distance: 0.2
max_distance: 200
use_lidar_clock: false
将 lidar_type 设置为LiDAR类型 。
设置 msop_port 和 difop_port 为雷达数据端口号。
4设置配置文件的lidar-ros部分
ros:
ros_recv_packet_topic: /rslidar_packets
ros_send_packet_topic: /rslidar_packets
ros_send_point_cloud_topic: /rslidar_points
将 ros_send_point_cloud_topic 设置为发送点云的话题。
5 运行
运行程序。
6.---------------------------工程(三)——多激光雷达标定、融合、聚类-------------------------------
6.工程(三)——多激光雷达标定、融合、聚类
一、设置IP 先能够成功接受数据
16线激光雷达默认:196.168.1.102 255.255.255.0(速腾的激光雷达的ip地址)
验证ping 196.168.1.201 ping自己的ip地址
验证ping 196.168.1.202
40线激光雷达默认:196.168.20.100 255.255.255.0
和赛的激光雷达是广播的不用ping
可以用rostopic echo /pandar_point检验是否有数据
二、Robosence16驱动
sudo apt-get install libpcap-dev
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/RoboSense-LiDAR/ros_rslidar
cd ~/catkin_ws/src/ros_rslidar/rslidar_drvier
chmod 777 cfg/*
cd ~/catkin_ws/src/ros_rslidar/rslidar_pointcloud
chmod 777 cfg/*
cd ~/catkin_ws
catkin_make
source devel/setup.bash
roslaunch rslidar_pointcloud rs_lidar_16.launch
三、禾赛科技40驱动
sudo apt install libpcap-dev libyaml-cpp-dev
mkdir -p rosworkspace/src ; cd rosworkspace/src
git clone https://github.com/CastielLiu/HesaiLidar-ros.git --recursive
cd ../
catkin_make --cmake-args -DCamera_Enable=ON
roslaunch hesai_lidar p40p.launch
四、同时启动两个16线与一个40线
首先16激光雷达1的IP是196.168.1.201 静态IP是196.168.1.102
包端口号是6699 7788
激光雷达2的IP是196.168.1.202 静态IP是196.168.1.102
包端口号是6688 7799
激光雷达3的IP是广播的 静态IP是196.168.20.100
包端口号是9870 2368
同时启动三个激光雷达需要满足
每个激光雷达的包端口号不同
本地电脑的IP相同
激光雷达本身的IP不同
设置本机IP是196.168.1.102
子网掩码是255.255.0.0 这样可以接收到196.168.*.*的数据
附录补充
附录一:MSOP和DIFOP协议包的内容(来源于RS-LIDAR -32手册)
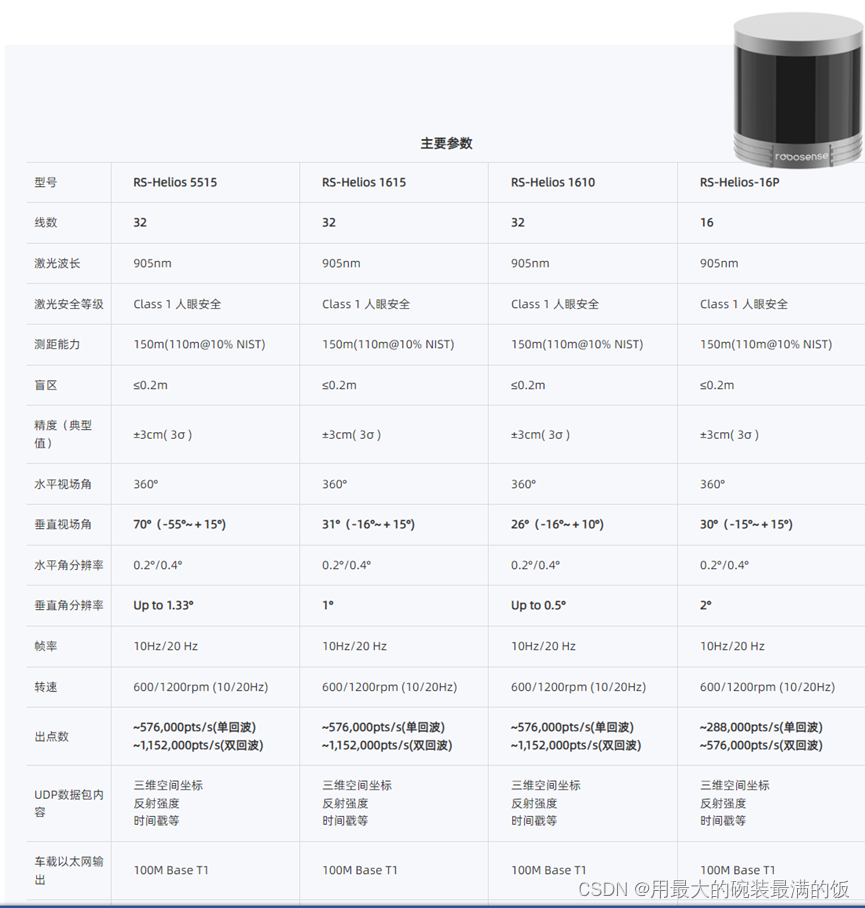
附录二:RS-Helios 1615激光雷达主要参数和对比

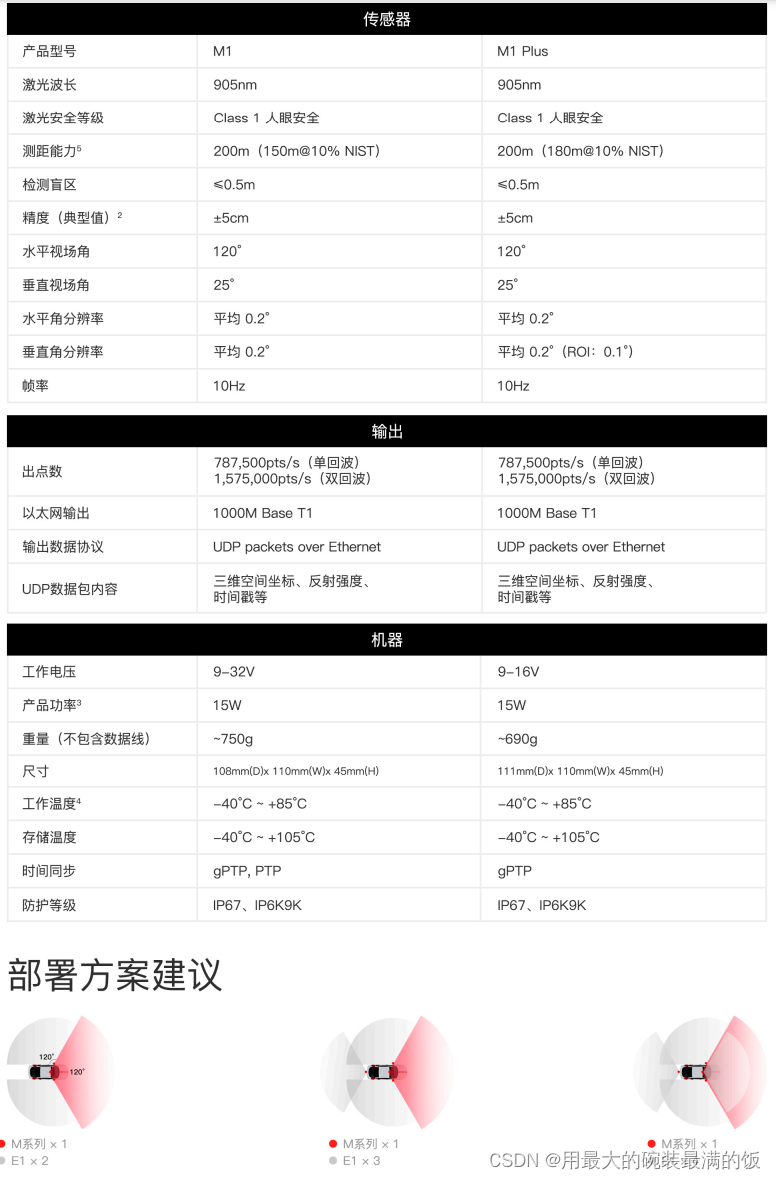
附录三:M1激光雷达主要参数和对比
附录四:Ruby PLUS激光雷达主要参数和对比
















 2814
2814











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









