










把TX1搭载到了X8无人机上,并把TX1和Pixhawk相连。
首先需要一个驱动,这个在TK1上安装cp210x驱动是同一个道理。
1、安装cp210x驱动可以参考http://blog.csdn.net/abc869788668/article/details/78296509
2、安装mavros可以参考http://www.ncnynl.com/archives/201709/2077.html
推荐源码安装,因为你可能需要修改源码!
3、此时运行 roslaunch mavros px4_2.launch 时,可能会出现如下错误:
UAS:GeographicLib exception: File not readable
/usr/share/GeographicLib/geoids/egm96-5.pgm |
Run install_geographiclib_dataset.sh script in
order to install Geoid Model dataset!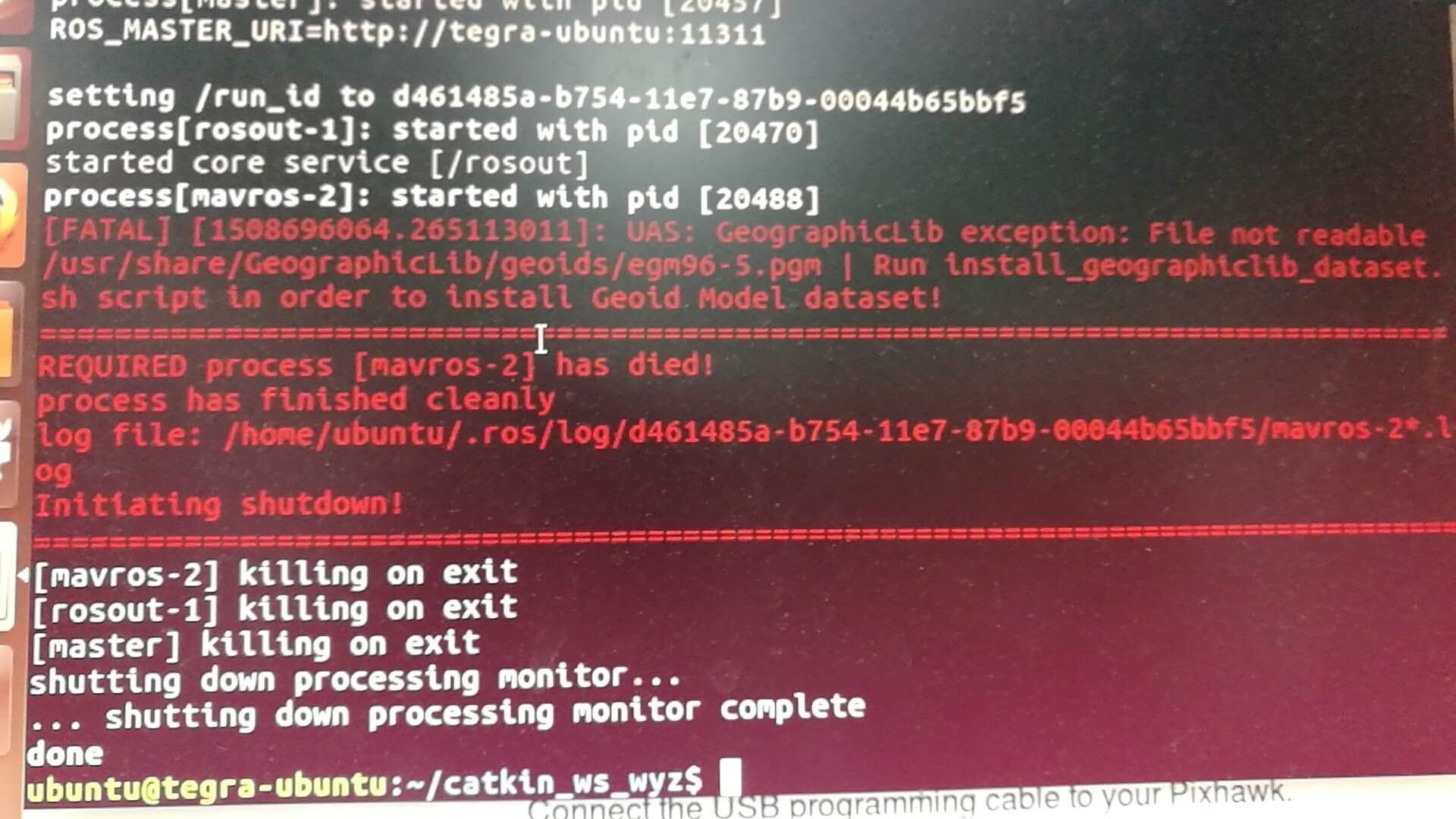
解决方法:
1、如果你是用二进制文件安装的,即用指令
sudo apt-get install ros-indigo-mavros ros-indigo-mavros-extras ros‐indigo‐control‐toolboxsudo /opt/ros/kinetic/lib/mavros/install_geographiclib_datasets.sh2、如果是用源文件安装,则去mavros那个文件夹搜索install_geographiclib_datasets.sh文件,然后用 sudo权限运行即可!!!
参考网址:https://community.emlid.com/t/mavros-fail-on-new-emlid-debian-stretch-image/7658















 516
516











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









