







最近在配置px4时遇到,的问题。解决方法也很简单,前提是你已经把下图中红框中的配置好
PX4固件版本:1.14.3
1.配置好以下参数

注意!!!!拆掉桨叶,拆掉桨叶,拆掉桨叶
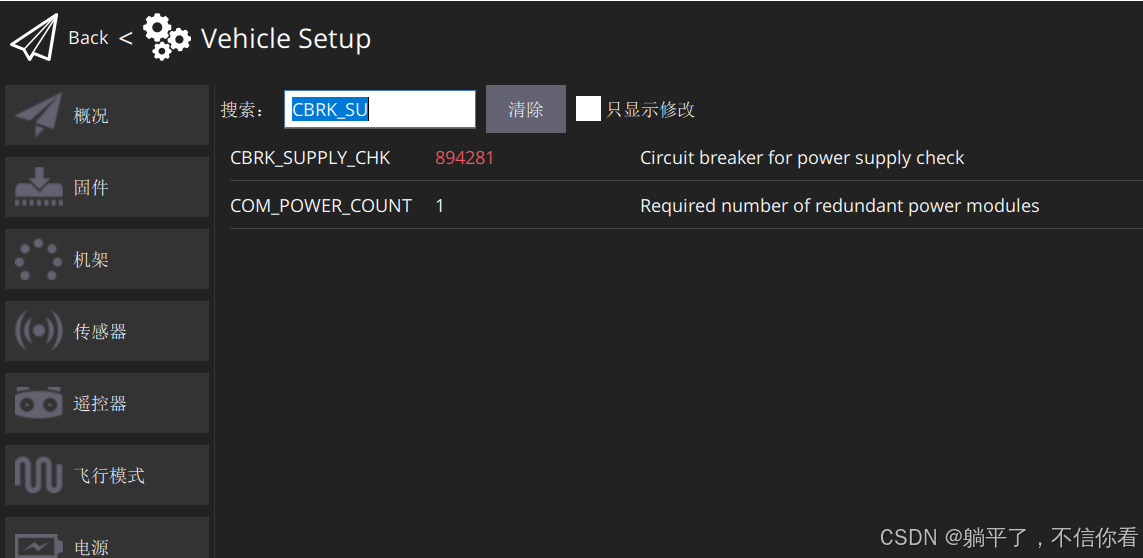
2.没有电流计无法解锁,CBRK_SUPPLY_CHK的参数,设置为 894281 即可
调好后重启成功后,拔掉usb再试试解锁,现在发现可以解锁了
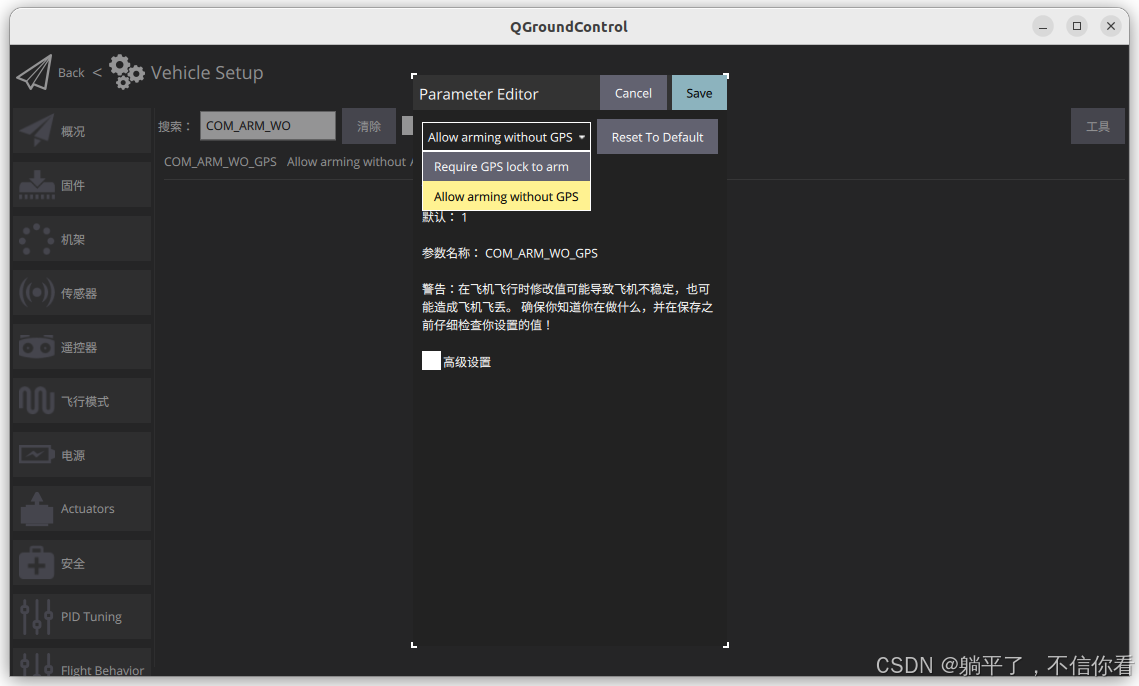
3.没有GPS导致无法解锁,调COM_ARM_WO_GPS ,允许无GPS解锁
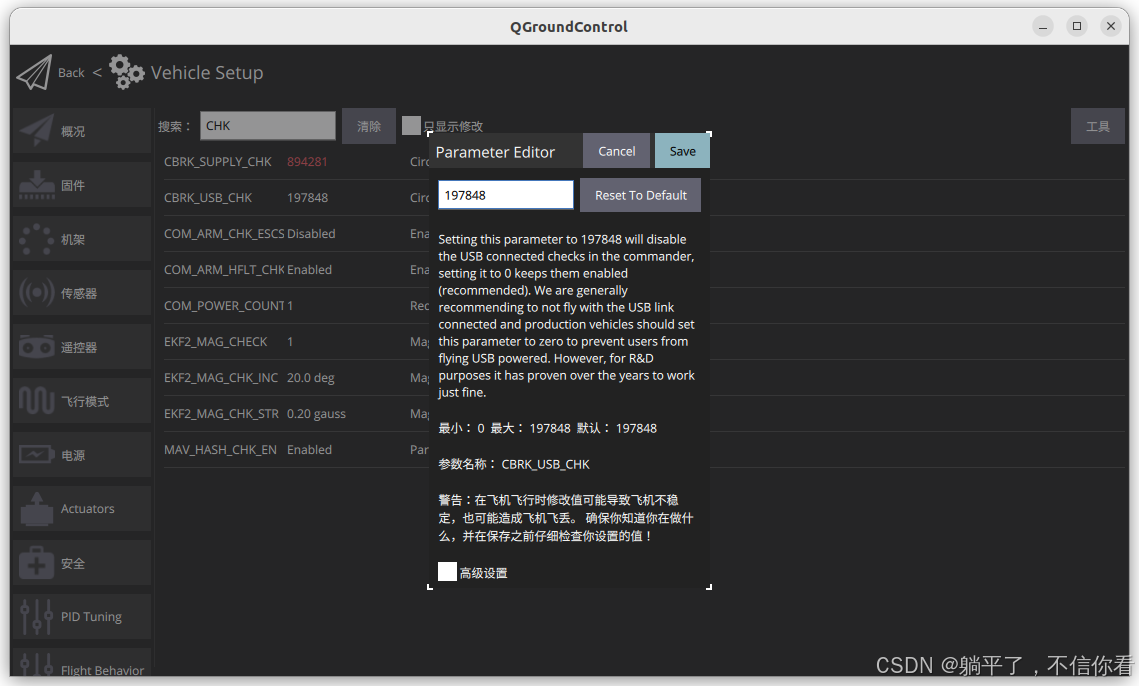
4.拔掉USB就不能解锁,调CBRK_USB_CHK 197848
重点,其实这些操作是把PX4的传感器的检查禁用掉,或者无视风险。
还有一些检查也可禁用调,参数名称中带CHK的
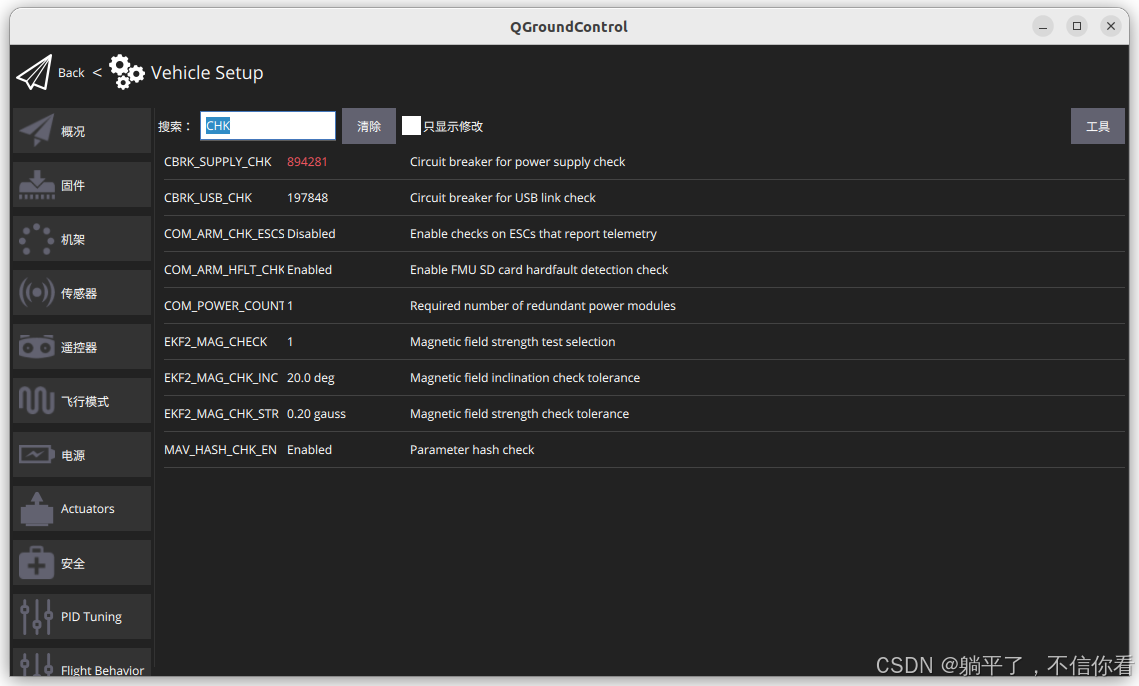 禁用与否看用户需求了 ,考虑好风险
禁用与否看用户需求了 ,考虑好风险

















 1945
1945

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









