







更多优质内容,请关注公众号:智驾机器人技术前线
1. 论文信息
-
标题:A Fast Dynamic Point Detection Method for LiDAR-Inertial Odometry in Driving Scenarios
-
作者:Zikang Yuan, Xiaoxiang Wang, Jingying Wu, Junda Cheng and Xin Yang
-
来源:IEEE ROBOTICS AND AUTOMATION LETTERS
-
项目地址:https://github.com/ZikangYuan/dynamic_lio
2. 摘要
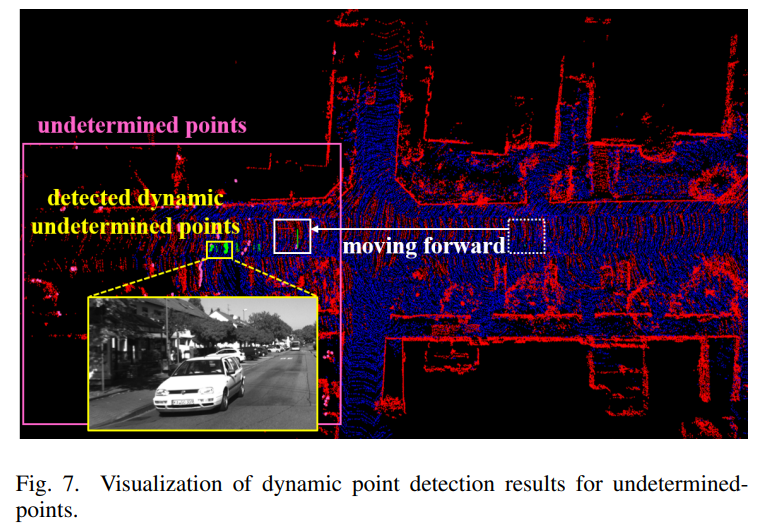
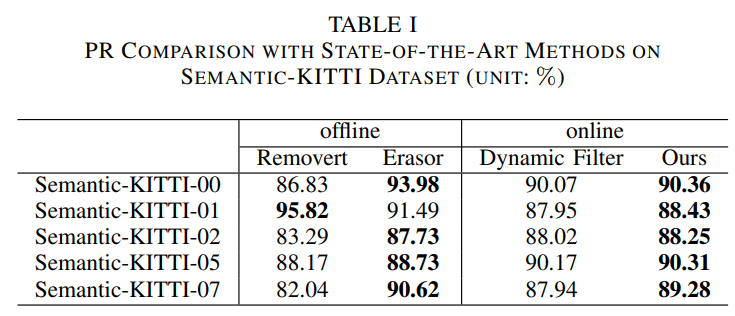
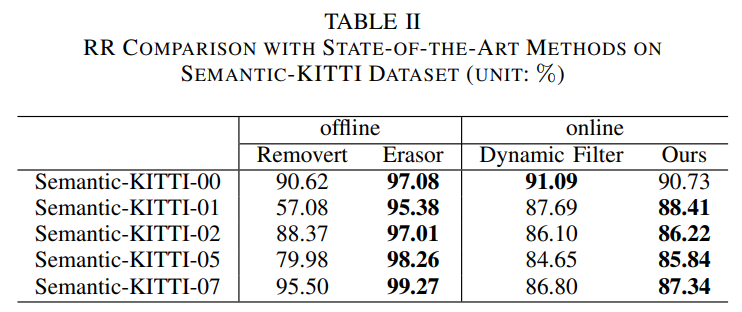
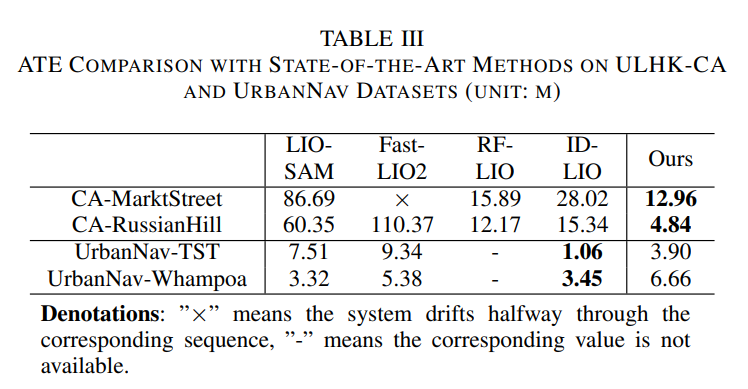
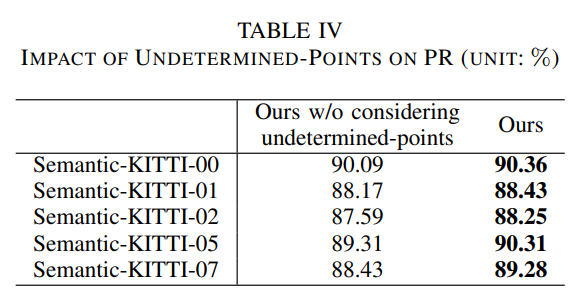
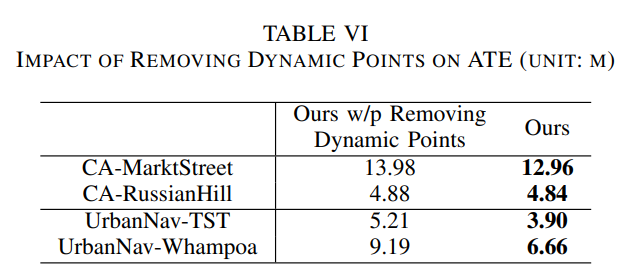
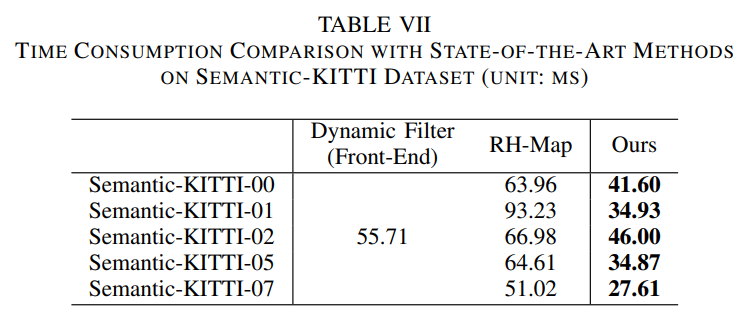
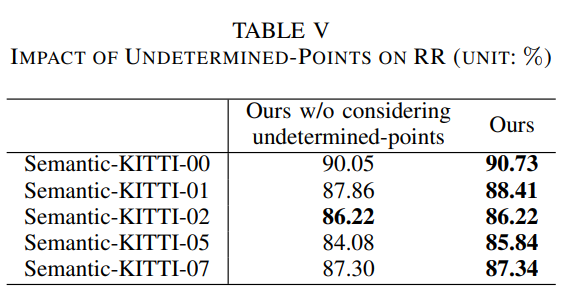
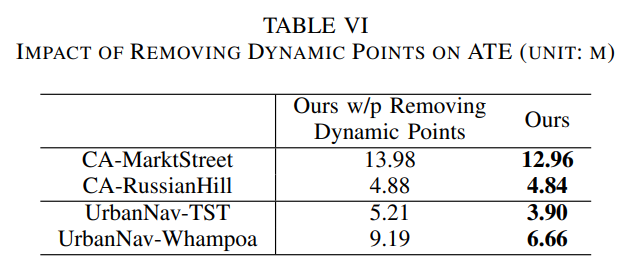
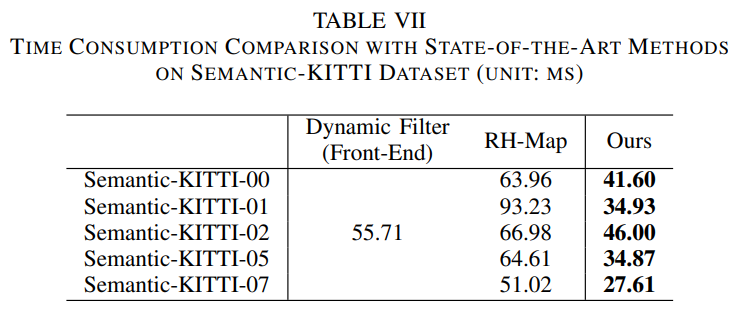
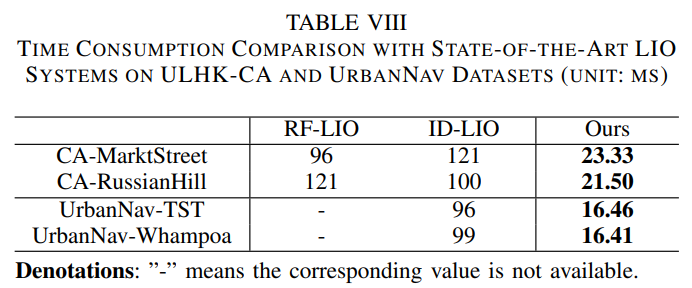
现有的基于3D点的动态点检测和移除方法具有显著的时间开销,使得它们难以适应激光雷达-惯性里程计系统。本文提出了一种基于标签一致性的动态点检测和移除方法,用于处理自动驾驶场景中的移动车辆和行人,并将所提出的动态点检测和移除方法嵌入到自主设计的激光雷达-惯性里程计系统中。在三个公共数据集上的实验结果表明,我们的方法可以在LIO系统中以极低的计算开销(即1∼9毫秒)完成动态点检测和移除,同时实现与最新技术方法相当的保留率和拒绝率,并显著提高位姿估计的准确性。
3. 主要贡献
-
提出了一种基于标签一致性的动态点检测和移除方法,该方法能够在相对较低的计算成本下检测和移除动态点;
-
将基于标签一致性的动态点检测和移除方法整合到LIO(激光惯性融合)系统中,并提高了估计姿态的准确性;
-
已经发布了我们系统的源代码,以利于社区的发展。
4. 核心思想与方法
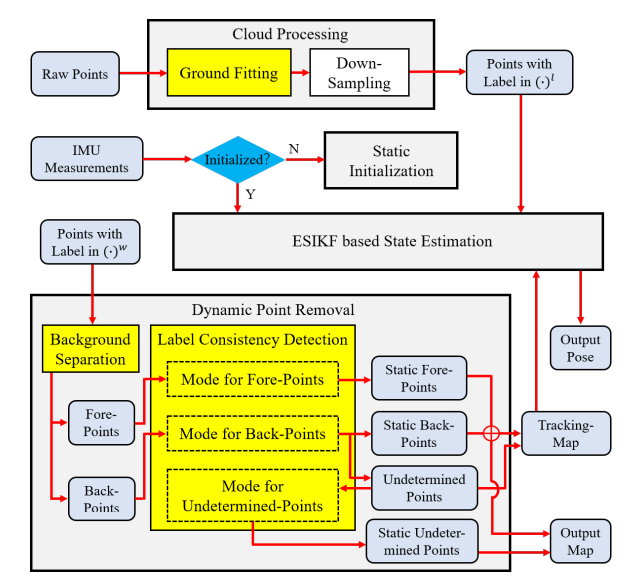
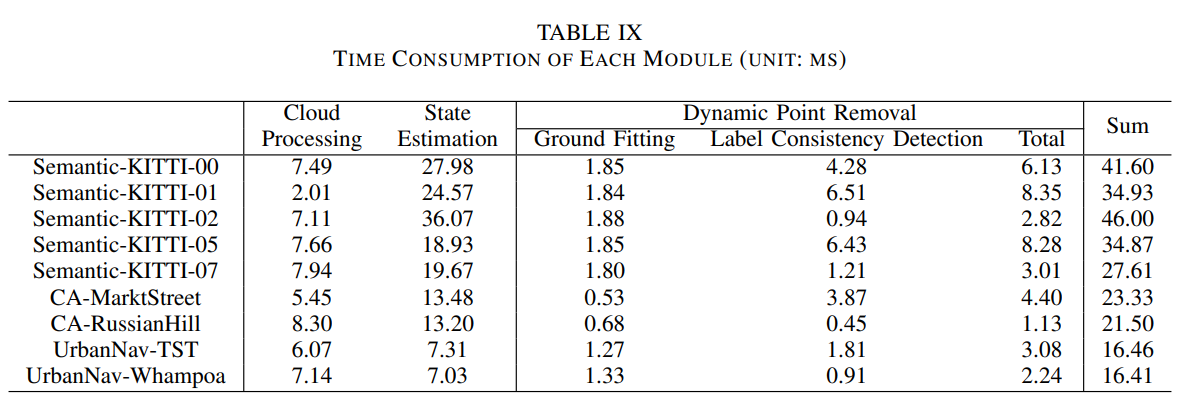
本文的系统架构如下图所示,它由四个主要模块组成:云处理、静态初始化、基于ESIKF的状态估计和动态点移除。
云处理模块从当前输入的点云数据中分离出地面点,并对每个3D点分配标签,标明是“地面点”还是“非地面点”。随后,它执行空间下采样以确保当前点云的均匀密度。
静态初始化模块利用IMU测量来估计一些状态参数,例如重力加速度、加速度计偏差、陀螺仪偏差和初始速度。
基于ESIKF的状态估计模块估计当前扫描的状态,其执行过程与SR-LIO[24]的状态估计模块完全一致。在点云配准过程中的所有最近邻查询操作都在跟踪图上进行。
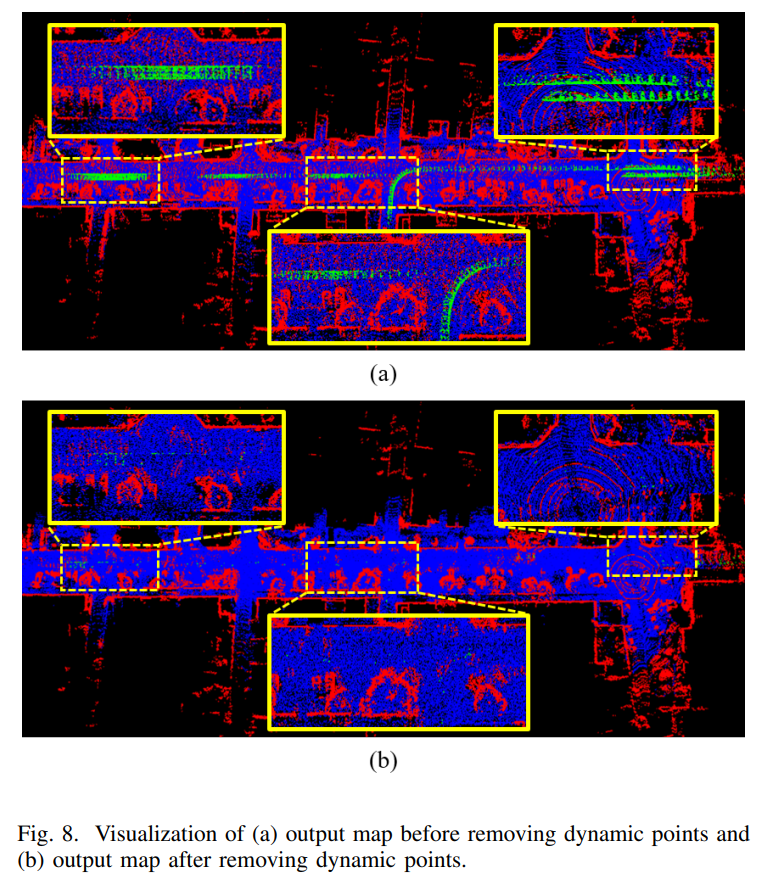
动态点移除模块使用基于标签一致性的动态点检测方法检测动态点,并在地图更新过程中将它们移除,以确保地图只包含静态点。整个系统维护两个全局地图:跟踪图和输出图。前者用于状态估计,而后者作为最终重建结果。与跟踪图相比,输出图中的动态点过滤得更彻底。对于跟踪图和输出图的管理,我们使用了哈希体素图,这与CT-ICP[5]相同。白色矩形区域的实现细节与我们之前的工作SR-LIO[24]完全相同。
image
5. 实验结果
image
image
image
image
image
image
image
image
image
image
image
image
image
image
image
image
6. 总结
本文提出了一种基于标签一致性的动态点检测和移除方法,该方法根据与最近邻标签的一致性来判断特定点是否为动态点。我们将所提出的动态点检测和移除方法嵌入到自设计的LIO(激光惯性里程计)中,该LIO能够以极低的成本准确估计状态并排除动态对象的干扰。实验结果表明,所提出的基于标签一致性的动态检测和移除方法能够实现与现有动态点检测和移除方法相当的精度和召回率,同时确保了更低的计算成本。此外,我们的Dynamic-LIO在动态环境中的运行速度大约是现有LIO系统的5倍。
本文仅做学术分享,如有侵权,请联系删文!
更多优质内容,请关注公众号:智驾机器人技术前线















 56
56

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









