







更多优质内容,请关注公众号:智驾机器人技术前线
1.论文信息
-
标题:An Efficient LiDAR SLAM with Angle-Based Feature Extraction and Voxel-based Fixed-Lag moothing
-
作者:Nuo Li, Yiqing Yao, Xiaosu Xu, Yiyang Peng, Zijian Wang, Hongyu Wei
-
来源: IEEE Transactions on Instrumentation and Measurement
-
文章链接:https://ieeexplore.ieee.org/abstract/document/10632209
2.摘要
激光雷达同时定位与地图构建(SLAM)为自动驾驶提供了精确的姿态估计和地图构建,具有广泛的应用。然而,在一些复杂场景中,例如恶劣环境,SLAM的性能无法满足自动驾驶系统的要求。针对上述问题,我们提出了一种准确且鲁棒的激光雷达SLAM方法。首先,为了避免激光雷达视点变化的不确定性,基于点云的等角分布特性,提出了一种基于角度的特征提取方法。其次,鉴于里程计误差的累积,我们构建了一个固定滞后平滑来联合优化多个关键帧的姿态。此外,为了提高滑动窗口内点云地图的环境表示,我们维护了两种类型的抽象体素地图。最后,提出了一种基于体素几何约束的基于体素的特征匹配方法,用于滑动窗口内姿态变换的细化。我们的方法在公共的KITTI、Mulran、The Newer College数据集基准和我们传感器系统收集的数据集上进行了性能和效率评估。实验结果表明,准确的特征提取、高效的体素特征匹配和一致的固定滞后平滑帮助我们的激光雷达SLAM方法在多个空间和时间上大规模的场景中实现了比其他现有最先进方法更好的性能。
3.主要贡献
-
介绍了一个基于特征和体素的激光雷达SLAM框架,该框架利用一组一致的点特征来构建体素特征的几何表示,从而提高了SLAM框架的效率和准确性;
-
基于点云的几何结构,提出了一种新颖的方法来定义基于角度的曲率,以快速提取稳定的特征点;
-
提出了一种基于体素匹配的固定滞后平滑方法,在滑动窗口内执行高效的体素匹配,以联合优化多个关键帧的姿态,并减少里程计的累积误差。
4.核心思想与方法
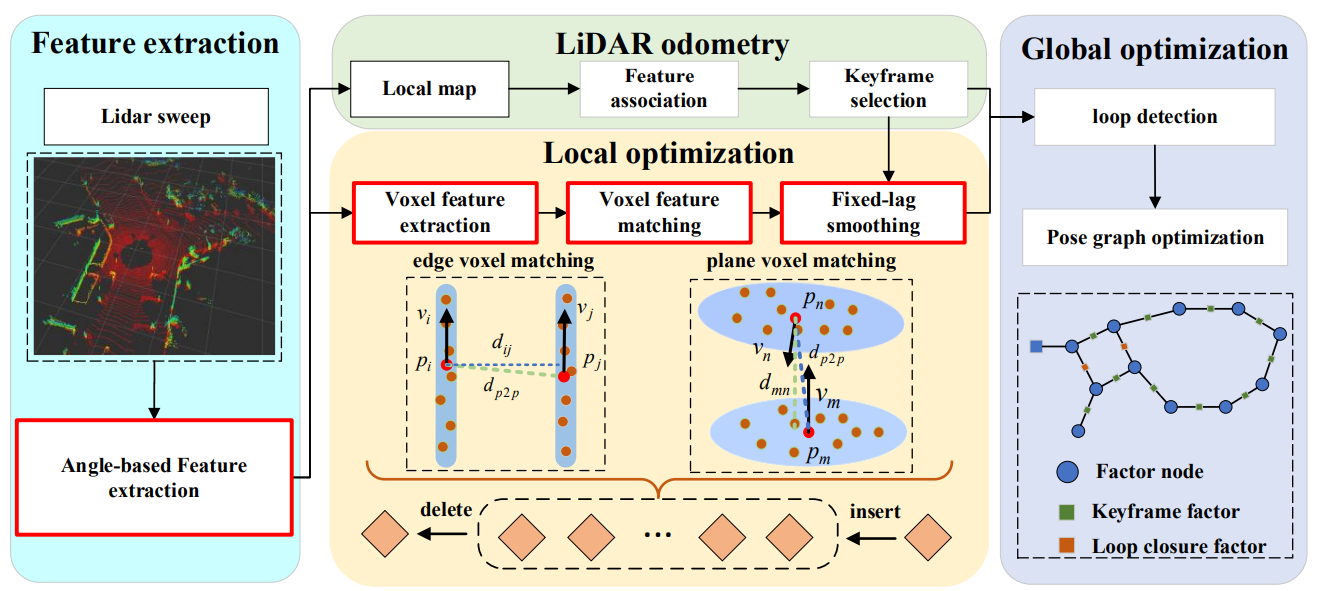
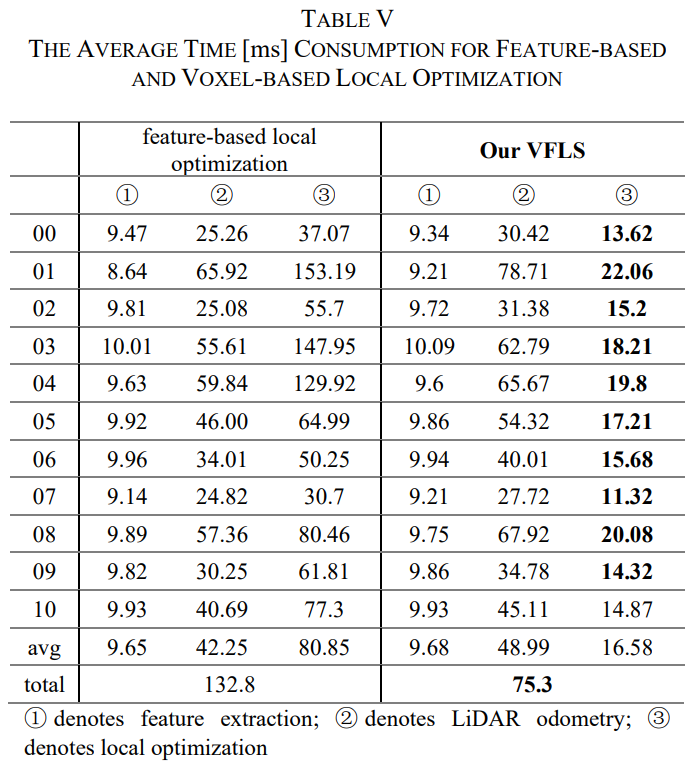
本文提出的激光雷达SLAM系统,由四个组件组成:特征提取、激光雷达里程计、局部优化和全局位姿图优化。特征提取模块接收原始激光雷达点云作为输入,并产生结构化的边缘和平面特征集。激光雷达里程计模块将这些特征与局部特征地图匹配,以估计每帧的姿态并更新地图。第三个模块,局部优化,使用先进的边缘和平面体素特征来细化关键帧姿态。该模块包括三个步骤:体素特征提取、体素特征匹配和局部固定滞后平滑。最后,全局位姿图优化模块使用优化后的姿态进行持续的基于图的优化。
image
5.实验仿真验证
image
image
image
image
image
6.总结 && 展望
在本文中,提出了一种结合了基于角度的特征提取和基于体素的局部优化的激光雷达SLAM方法。我们的改进仅专注于里程计中的特征提取和局部优化,但将其应用于完整的SLAM也将增强性能,这已在实验部分得到验证。我们的方法利用点云的空间角度信息,以实现更准确和稳定的特征点云。此外,体素特征提取使我们能够更有效地捕捉环境的结构属性。我们已经证明,局部优化增强了姿态估计的一致性。通过比较实验分析,我们的框架在测试具有挑战性的数据集时表现出鲁棒性。展望未来,我们旨在探索体素特征提取和地图更新的新技术,以及提高算法在非结构化场景中的准确性和效率。

本文仅做学术分享,如有侵权,请联系删文!
更多优质内容,请关注公众号:智驾机器人技术前线



















 1452
1452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











